

4.4 Управление режимами работы ву с помощью контроллера трм10а
Внешний вид регулятора имеет вид:

Рисунок 16 – Внешний вид ТРМ10
Обозначение ТРМ-10а:

Рисунок 17 – Функциональное обозначение регулятора
Диапазон напряжения питания:
А - питание прибора 187...242 В переменного тока частотой 50 ± 5 Гц;
Б - питание прибора 90...245 В переменного тока с частотой 47...63 Гц или
постояннного тока.
Конструктивное исполнение:
Н - корпус настенного крепления с размерами 130x105x65 мм и
степенью защиты корпуса IP44;
Щ1 - корпус щитового крепления с размерами 96x96x70 мм и
степенью защиты со стороны передней панели IP54;
Щ2 - корпус щитового крепления с размерами 96x48x100 мм и
степенью защиты со стороны передней панели IP54;
Д - корпус для крепления на DIN-рейку с размерами 88x72x54 мм и
степенью защиты со стороны лицевой панели IP20.
Тип входного устройства:
ТС - для приборов, работающих с термопреобразователями сопротивления по НСХ: 50М, 100М, 50П, 100П и гр. 23;
ТП1 - для приборов, работающих с термопарами по НСХ: XK(L) - хромель-копель,
ХА(К) - хромель-алюмель;
ТП2 - для приборов, работающих с термопарами по НСХ: НН(М) - никросил-нисил
и XK(J) - железо-константан;
ТПП - для приборов, работающих с термопарами по НСХ: ПП(5) - платина-платина-родий и ПП(R) - платина-платина-родий;
AT - для приборов, работающих с унифицированными сигналами постоянного тока:
0...5 мА, 0...20 мА и 4...20 мА;
АН - для приборов, работающих с унифицированными сигналами напряжения
постоянного тока 0...1 В.
Тип встроенного выходного устройства (ВУ) ПИД-регулятора:
Р - реле электромагнитное;
К - транзисторная оптопара структуры n-р-n-типа;
С - симисторная оптопара;
И - цифро-аналоговый преобразователь «параметр - ток 4...20 мА»;
СЗ- три симисторных оптопары для управления трехфазной нагрузкой.
4.4.1 Обработка входного сигнала
Сигнал, полученный с датчика, преобразуется в цифровое значение измеряемой величины (температуры, давления, расхода и т.д).
При работе с датчиками, формирующими на выходе унифицированный сигнал тока или напряжения (модификации AT и АН), можно произвольно задавать шкалу измерения. Для этого устанавливаются следующие параметры работы прибора: "нижняя" и "верхняя граница шкалы измерения" и "положение десятичной точки".
Параметр «нижняя граница шкалы измерения» определяет, какое значение измеряемой величины будет выводиться на индикатор при минимальном уровне сигнала с датчика (например, 4 мА для датчика с выходным сигналом тока 4...20 мА).
Параметр "верхняя граница шкалы измерения» определяет, какое значение измеряемой величины будет выводиться на индикатор при максимальном уровне сигнала с датчика (например, 20 мА для датчика с выходным сигналом тока 4...20 мА или 1 В для датчика с выходным сигналом напряжения 0...1 В).
Параметр "положение десятичной точки" определяет количество знаков после запятой, которое будет выводиться на индикатор.
Коррекция измерений:
Преобразованные значения могут быть откорректированы с целью устранения начальной погрешности преобразования входных датчиков. Эти погрешности выявляются после проведения метрологических испытаний и устраняются путем ввода корректирующего значения 8, устанавливаемого в параметре "сдвиг характеристики". К каждому вычисленному значению измеренной величины Тизм прибавляется значение этого параметра, и тогда на индикатор выводится значение Ті.
Коррекция «сдвиг характеристики» используется для компенсации погрешностей, вносимых сопротивлением подводящих проводов (при подключении термопреобразователей сопротивления по двухпроводной схеме), а также при отклонении у термопреобразователя сопротивления значения Ro ot стандартного.
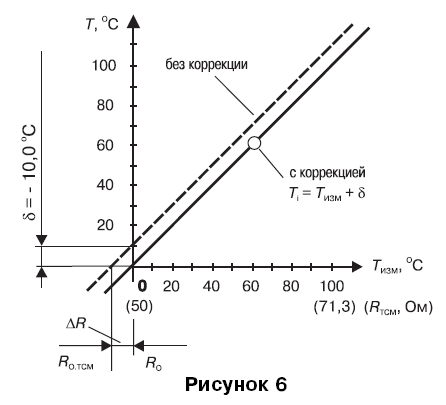
Рисунок 18 – Пример осуществления коррекции
Цифровая фильтрация измерений
Для улучшения эксплуатационных качеств прибора в блок обработки данных введен цифровой фильтр, позволяющий уменьшить влияние случайных помех на измерение контролируемых величин.
Работа фильтра описывается параметром «глубина цифрового фильтра» N, определяющим количество последних N измерений, для которых прибор вычисляет среднее арифметическое. Полученная величина поступает на входы ПИД-регулятора и устройства сравнения.
Вид переходных характеристик для разных N показан на рисунке 19. При значении параметра равном 0 или 1, фильтр выключен. Уменьшение значения N приводит к более быстрой реакции прибора на скачкообразные изменения контролируемой величины, но снижает помехозащищенность измерительного тракта. Увеличение значения N приводит к улучшению помехозащищенности, но вместе с этим повышает инерционность прибора.
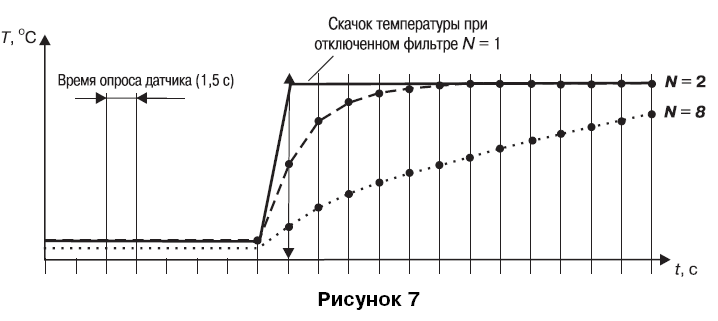
Рисунок 19 – Вид переходных характерситик для N-измерений
4.4.2 ПИД-регулятор устройства
Основные параметры работы ПИД-регулятора
На выходе регулятора вырабатывается управляющий сигнал /(выходная мощность), действие которого направлено науменыиениеотклонениятекущего значения контролируемой величины от заданного: (Еі)
 (1)
(1)
Где:
Хр - полоса пропорциональности;
Е і - разность между заданным Туст и текущим Т значением измеряемой величины, или рассогласование;
τд - постоянная времени дифференцирования;
ΔЕs - разность между двумя соседними рассогласованиями Еi и Еi-1;
Δtизм = 1,5 с - время между двумя соседними измерениями Тi и Тi-1;
τи - постоянная времени интегрирования;
ΣЕі - накопленная сумма рассогласований.
Из формулы (1) видно, что при ПИД-регулировании сигнал управления зависит от:
1 ) Е - разницы между текущим значением измеряемой величины Ті и заданным значением параметра Туст.
Отношение Еі/Хр - называется пропорциональной составляющей выходного сигнала;
2) накопленной ошибки регулирования ΣЕі Δtизм, которая является дополнительным
источником
выходной мощности и позволяет добиться
максимальной скорости достижения
температуры
уставки при отсутствии перерегулирования;
выражение
 называется интегральной
составляющей выходного
сигнала;
называется интегральной
составляющей выходного
сигнала;
3) скорости изменения параметра ΔЕі / Δtизм , вызывающей реакцию регулятора на резкое
изменение
измеряемого параметра, возникшее,
например, в результате внешнего
возмущающего
воздействия;
 выражение
называется дифференциальной
составляющей
выходного
сигнала.
выражение
называется дифференциальной
составляющей
выходного
сигнала.
Для эффективной работы ПИД-регулятора необходимо установить правильные для конкретного объекта регулирования значения коэффициентов ПИД-регулятора Хр, τд и τи.
Для аналогового управления выходной сигнал ПИД-регулятора преобразуется в пропорциональный ему ток 4. ..20 мА. Для импульсного управления выходной сигнал преобразуется в последовательность управляющих импульсов с периодом следования Тсл и длительностью каждого импульса D, которая определяется по формуле:
 .
.
Тип внешнего исполнительного устройства (тип управления) необходимо указать в программируемом параметре "Тип выходного сигнала".
При использовании электромагнитного реле этот параметр задают равным 0, а при использовании бесконтактных ключей (тиристоров, твердотельных реле и т.п.) - равным 1. Минимальные значения длительности импульсов управления, формируемых при этом прибором ТРМ10 приведены в таблице 1.
Таблица 1 – Значения длительности импульсов управления
Тип входного сигнала |
Минимальный импульс, м/с |
|
Устройство |
Значение параметра |
|
Э/м реле |
0 |
200 |
Бесконтактные ключи |
1 |
6 |
При использовании аналогового выхода этот параметр устанавливают равным 2.
Значение параметра «Период следования импульса» (Тсл) влияет на частоту выходного сигнала ПИД-регулятора. Для более эффективной работы ПИД-регулятор должен иметь мгновенную реакцию на изменения регулируемой величины, поэтому частота выходного сигнала должна быть приблизительно равной частоте опроса входного датчика.
Поэтому следует устанавливать значение Тсл, равным 1...2с, что возможно только при использовании бесконтактных ключей (тиристоров, симисторов). Увеличение периода следования управляющих импульсов позволяет при использовании в качестве исполнительного устройства электромагнитного реле или пускателя удлинить срок службы силовых контактов, но может ухудшить качество регулирования.
Дополнительные параметры ПИД-регулятора
Для правильного формирования выходного сигнала ПИД-регулятора необходимо задать "тип исполнительного устройства": нагреватель или холодильник.
Нагревателем условно называют устройство, при включении которого увеличивается значение измеряемого параметра. Холодильником называют устройство, при включении которого уменьшается значение измеряемого параметра.
Для исключения излишних срабатываний регулятора при небольшом значении рассогласования Еі для вычисления значений У по формуле (1) используется уточненное значение Ер, вычисленное в соответствии с условиями:
если |Ei|<Xd, то ЕР=0;
если Ei>Xd, то ЕР=Ei-Xd;
если Ei< - Xd, то ЕР= Ei+Xd;
где Xd- зона чувствительности (рисунок 20).
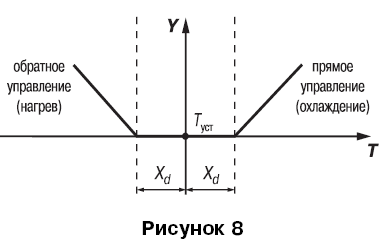
Рисунок 20 – Зона нечувствительности
Значение зоны нечувствительности задается в параметре "зона нечувствительности".