

4.5 Анализ устойчивости и динамических характеристик привода
4.5.1. Азимутальный привод
Замкнутая система.
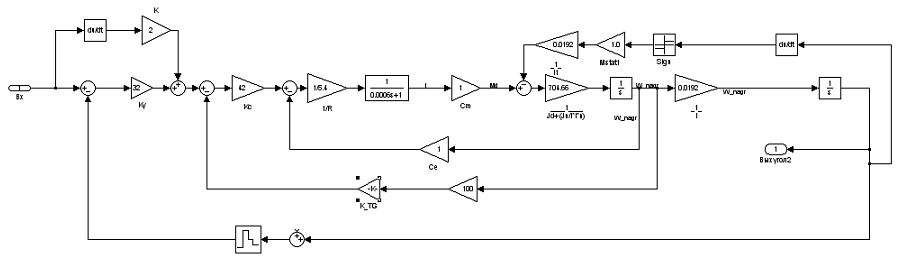
Рисунок 6. Структурная схема замкнутой системы.

Рисунок 7. Реакция на единичное входное воздействие
1. Время переходного процесса
ТПП = 0,25 с.
2. Величина перерегулирования
![]()
где hMAX(t)– максимальное значение переходного процесса;
hУСТ(t)- установившееся значение переходного процесса;
t - время переходного процесса.
Величина перерегулирования = 0,6%.
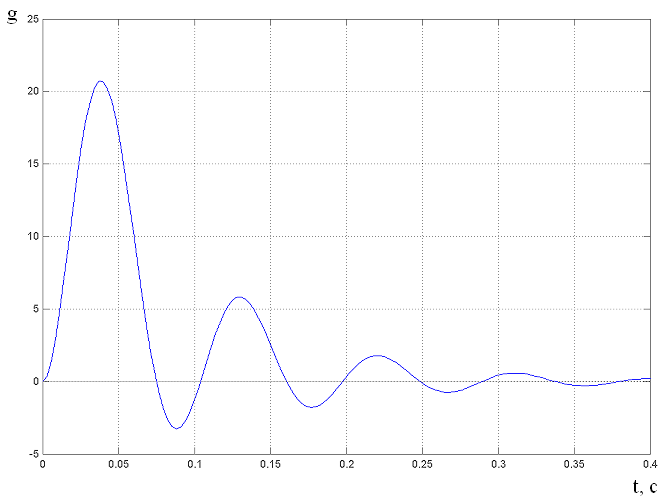
Рисунок 8. Реакция на импульсное входное воздействие.

Рисунок 9. ЛАФЧХ замкнутой системы.
Разомкнутая система

Рисунок 10. Структурная схема разомкнутой системы.

Рисунок 11. ЛАФЧХ разомкнутой системы.
Запас по амплитуде: L = 7,8 дБ
Запас по фазе: = 81,5°
Работа привода при внешнем возмущающем воздействии.
 Рисунок
12. Функциональная схема системы для
определения реакции привода на
эквивалентное входное воздействие
Рисунок
12. Функциональная схема системы для
определения реакции привода на
эквивалентное входное воздействие
![]()
Определим ошибки привода при синусоидальном входном воздействии
по рисунку 7.
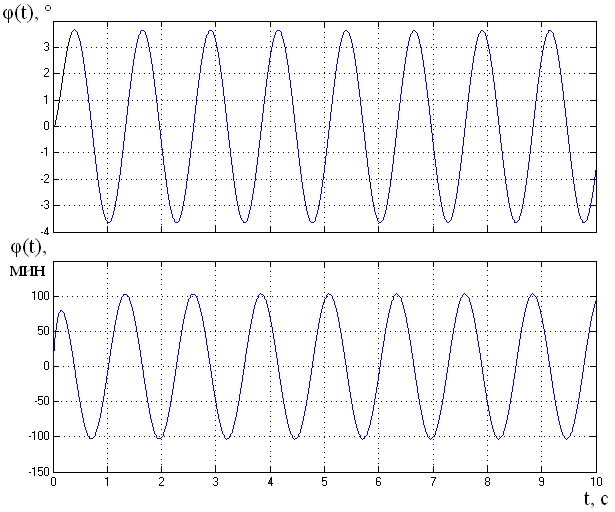
Рисунок 13. Реакция системы на эквивалентное
входное воздействие при коэффициентах
усиления по углу и по скорости![]() ,
,
![]()

Рисунок 14. Реакция системы на эквивалентное
входное воздействие при коэффициентах
усиления по углу и по скорости:
![]() ,
,
![]()
Имея запасы по фазе и амплитуде можно увеличить коэффициенты усиления по углу и по скорости. Однако как видно из рисунков 7 и 8 данный метод не приводит к существенному улучшению динамических характеристик системы (значительного уменьшения ошибки не произошло). Кроме того снижается полоса пропускания привода.
Введение корректирующего звена.
Оптимальным решением будет введение опережающего воздействия по скорости, которое позволит улучшить динамические характеристики, не снижая устойчивости системы.
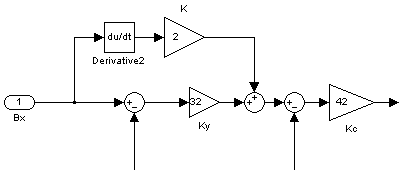
Рисунок 15. Опережающее воздействие по скорости.

Рисунок 16. Ошибка привода при входном
синусоидальном воздействии
![]() ,
с введением звена опережающего воздействия
по скорости.
,
с введением звена опережающего воздействия
по скорости.
Как видно из результатов моделирования
максимальная ошибка значительно
уменьшилась и составляет порядка 9
минут, СКО
![]()
4.5.2 Угломестный привод.
По аналогии с азимутальным приводом проводим моделирование угломестного привода.
Исходные данные по ТЗ.
Угловая скорость вращения нагрузки относительно горизонта – от 0 до 16/с;
Угловое ускорение нагрузки относительно горизонта – от 0 до 30/с ;
Момент неуравновешенности М - не более 0,2 Нм;
Момент инерции J
- не более 0,5
![]()
Статический момент сил в подшипниках Мстат = 0,15 Нм;
Коэффициент передачи 12.
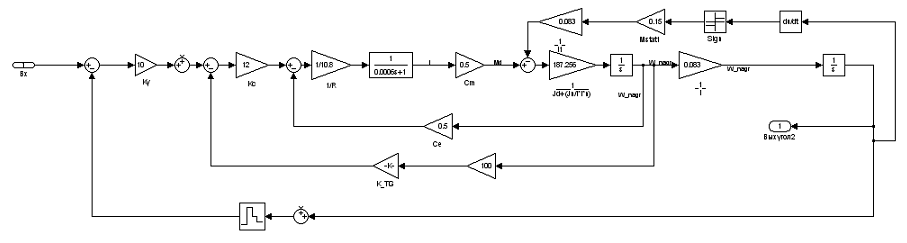
Рисунок 17. Структурная схема замкнутой системы.
Из рисунка 19:
Время переходного процесса ТПП = 2 с.
Величина перерегулирования = 50%.
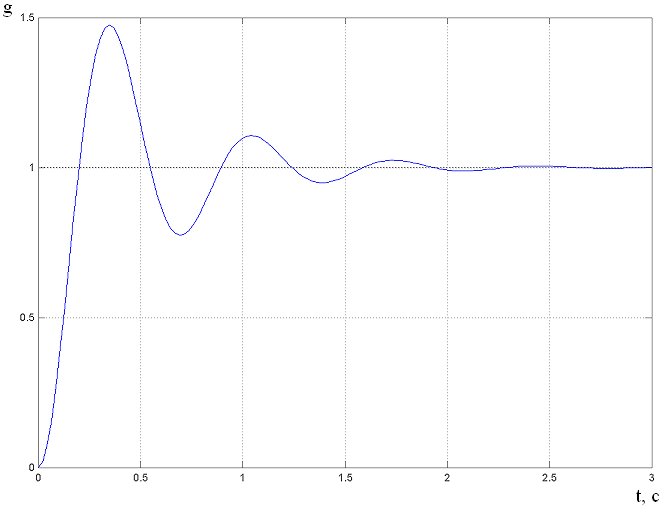
Рисунок 18. Реакция на единичное входное воздействие

Рисунок 19. Реакция на импульсное входное воздействие.

Рисунок 20. ЛАФЧХ замкнутой системы.
Разомкнутая система.

Рисунок 21. Структурная схема разомкнутой системы.

Рисунок 22. ЛАФЧХ разомкнутой системы.
Запас по амплитуде: L = 40 дБ
Запас по фазе: = 26°
Работа угломестного привода при внешнем возмущающем воздействии
Определим ошибки привода при синусоидальном входном воздействии
![]()
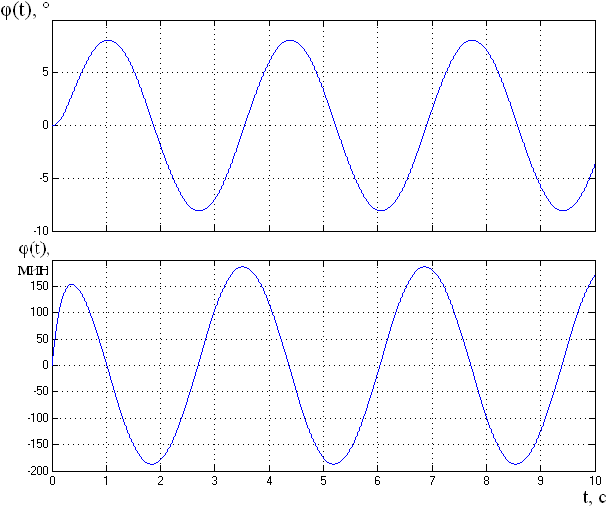
Рисунок 23. Ошибка привода при входном синусоидальном воздействии,
Как видно из графика привод имеет достаточно большую ошибку, поэтому как и в случае с азимутальным приводом необходимо вводить корректирующее звено.
Введение корректирующего звена.

Рисунок 24. Опережающее воздействие по скорости.

Рисунок 25. Ошибка привода при входном синусоидальном воздействии, с введением звена опережающего воздействия по скорости.
Ошибка привода значительно уменьшилась и равна 13 минутам, тогда СКО
![]()
На основе анализа полученных результатов моделирования приводов сделаны выводы:
для азимутального привода:
ошибка привода при качке носителя
составляет
![]()
для угломестного привода:
ошибка при качке носителя
составляет
![]()