

Механическая характеристика асинхронного двигателя
Д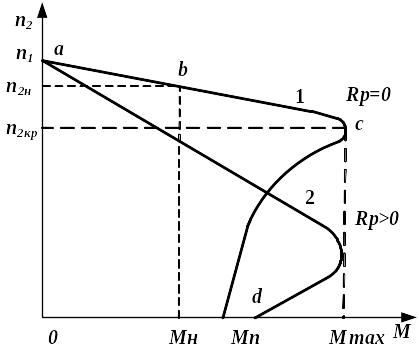 ля
целей электропривода большое значение
имеет зависимость частоты вращения
двигателя от нагрузки на валу
ля
целей электропривода большое значение
имеет зависимость частоты вращения
двигателя от нагрузки на валу
![]() ;
эта зависимость называется механической
характеристикой (см. рис. 2). На графике
механической характеристики можно
выделить точки, соответствующие основным
режимам работы:
;
эта зависимость называется механической
характеристикой (см. рис. 2). На графике
механической характеристики можно
выделить точки, соответствующие основным
режимам работы:
а – идеальный холостой ход
(![]() );
);
b – номинальный режим, на который рассчитан двигатель заводом-изготовителем
(![]() );
);
с – критический режим
(![]() );
);
d – начало пуска
(![]() – пусковой момент).
– пусковой момент).
Рис. 2
Наличие
![]() у асинхронных двигателей физически
означает, что к нему можно прикладывать
тормозной момент только до определенного
предела.
у асинхронных двигателей физически
означает, что к нему можно прикладывать
тормозной момент только до определенного
предела.
При
![]() двигатель останавливается, поэтому
максимальный момент называется
критическим, участок cd
– неустойчивая пусковая часть
характеристики.
двигатель останавливается, поэтому
максимальный момент называется
критическим, участок cd
– неустойчивая пусковая часть
характеристики.
Часть характеристики от точки с до а – устойчивая рабочая ветвь.
Одной из важных величин, характеризующих асинхронный двигатель, является перегрузочная способность
![]() ,
,
где
![]() – коэффициент, определяющий перегрузочную
способность.
– коэффициент, определяющий перегрузочную
способность.
Коэффициент всегда больше 1, что обеспечивает запас устойчивости и предотвращает внезапные остановки двигателя при случайных колебаниях напряжения сети или тормозного момента на валу.
Следует отметить,
что изменение частоты вращения асинхронных
двигателей при изменении нагрузки от
нуля (холостой ход) до полной (номинальный
режим) весьма невелико, так как их
номинальное скольжение обычно находится
в пределах 0,02-0,05. Поэтому механическая
характеристика является жесткой.
Рассмотренная механическая характеристика
(см. рис. 2, кривая 1) называется естественной,
так как построена для случая, когда
![]() ;
;
![]() ,
и в цепях статора и ротора отсутствуют
какие-либо добавочные сопротивления.
,
и в цепях статора и ротора отсутствуют
какие-либо добавочные сопротивления.
Кривая 2 (см. рис. 2) называется искусственной характеристикой. Эта характеристика более мягкая, получается при включении добавочного сопротивления в цепь фазного ротора.
Рабочие характеристики асинхронного двигателя
Механическая характеристика показывает свойства двигателя как средства для электропривода. Но для наиболее полного выяснения свойств самого двигателя служат его рабочие характеристики.
Рабочими
характеристиками называются зависимости
![]() от полезной мощности
от полезной мощности
![]() на валу двигателя при постоянных
значениях
на валу двигателя при постоянных
значениях
![]() и частоты
и частоты
![]() сети.
сети.
Характеристика
тока статора
![]() (рис. 3)
(рис. 3)
При холостом ходе
двигателя из сети потребляется ток
холостого хода, составляющий 0,25 – 0,5 от
номинального тока двигателя. С увеличением
нагрузки растет ток ротора, что вызывает
увеличение тока статора компенсирующее
размагничивающее действие тока ротора,
вследствие чего кривая
![]() имеет восходящий характер.
имеет восходящий характер.

Рис. 3. Рабочие характеристики асинхронного двигателя
Скоростная
характеристика
![]() и зависимость
и зависимость
![]()
Из формулы (11) для
скольжения
![]() следует,
что при холостом ходе двигателя частота
вращения ротора
следует,
что при холостом ходе двигателя частота
вращения ротора
![]() близка к синхронной, а скольжение мало
отличается от нуля. По мере увеличения
нагрузки на валу частота вращения
уменьшается (скольжение растет), поэтому
зависимость
имеет вид нисходящей, а
имеет вид восходящей кривой.
близка к синхронной, а скольжение мало
отличается от нуля. По мере увеличения
нагрузки на валу частота вращения
уменьшается (скольжение растет), поэтому
зависимость
имеет вид нисходящей, а
имеет вид восходящей кривой.
Характеристика КПД
КПД асинхронного
двигателя
![]() ,
,
где
![]() – подведенная к статору мощность;
– подведенная к статору мощность;
![]() – полезная
механическая мощность;
– полезная
механическая мощность;
![]() – мощность потерь
в двигателе, определяемая выражением:
– мощность потерь
в двигателе, определяемая выражением:
![]() ,
,
где
![]() – мощность магнитных потерь;
– мощность магнитных потерь;
![]() – мощность
электрических потерь в статоре;
– мощность
электрических потерь в статоре;
![]() – мощность
электрических потерь в роторе;
– мощность
электрических потерь в роторе;
![]() – мощность
механических потерь.
– мощность
механических потерь.
При холостом ходе
![]() потери холостого хода будут складываться
в основном, из механических и магнитных
потерь, то есть
потери холостого хода будут складываться
в основном, из механических и магнитных
потерь, то есть
![]() ,
так как потери в обмотках при этом
незначительны. При увеличении нагрузки
потери в двигателе растут медленнее,
чем полезная мощность
.
Поэтому КПД резко возрастает и достигает
максимума при нагрузке около 0,7 – 0,8 от
номинальной; при дальнейшем росте
нагрузки КПД уменьшается, что связано
с быстрым ростом потерь в обмотках.
Современные асинхронные двигатели
имеют номинальный КПД 0,75 – 0,95.
,
так как потери в обмотках при этом
незначительны. При увеличении нагрузки
потери в двигателе растут медленнее,
чем полезная мощность
.
Поэтому КПД резко возрастает и достигает
максимума при нагрузке около 0,7 – 0,8 от
номинальной; при дальнейшем росте
нагрузки КПД уменьшается, что связано
с быстрым ростом потерь в обмотках.
Современные асинхронные двигатели
имеют номинальный КПД 0,75 – 0,95.
Характеристика
коэффициента мощности
![]() (см. рис. 3)
(см. рис. 3)
Кроме активной
мощности
![]() ,
двигатель потребляет реактивную мощность
,
двигатель потребляет реактивную мощность
![]() ,
в основном необходимую для создания
вращающегося магнитного поля. Коэффициент
мощности
,
в основном необходимую для создания
вращающегося магнитного поля. Коэффициент
мощности
 .
.
При холостом ходе
![]() имеет малое значение (примерно 0,1),
так как активная мощность мала, расходуется
только на небольшие потери в статоре и
небольшие механические потери, а
реактивная мощность имеет постоянное
значение, так как магнитный поток
постоянный.
имеет малое значение (примерно 0,1),
так как активная мощность мала, расходуется
только на небольшие потери в статоре и
небольшие механические потери, а
реактивная мощность имеет постоянное
значение, так как магнитный поток
постоянный.
С увеличением нагрузки активная мощность увеличивается, а реактивная мощность в пределах до номинальной нагрузки имеет неизменное значение. В результате увеличивается. Однако при дальнейшем увеличении нагрузки сказывается увеличение потоков рассеяния, за счет чего реактивная мощность Q1 увеличивается и начинает уменьшаться.
Характеристика
электромагнитного момента
![]() (см. рис. 3)
(см. рис. 3)
В установившемся
режиме работы двигателя электромагнитный
момент
![]() уравновешивается статическим моментом
сопротивления (тормозным моментом)
уравновешивается статическим моментом
сопротивления (тормозным моментом)
![]() ,
,
где
![]() – момент холостого хода, создаваемый
силами трения;
– момент холостого хода, создаваемый
силами трения;
![]() – полезный момент
на валу двигателя, создаваемый нагрузкой
(рабочей машиной):
– полезный момент
на валу двигателя, создаваемый нагрузкой
(рабочей машиной):
 ,
,
то есть, пропорционален
полезной мощности
![]() и обратно пропорционален угловой
скорости вращения
и обратно пропорционален угловой
скорости вращения
![]() .
.
Так как при изменении
нагрузки (в пределах от холостого хода
до номинальной) частота вращения
асинхронного двигателя остается почти
постоянной, то зависимость
у асинхронных двигателей прямолинейна.
Характеристика вращающегося момента
,
складывающегося из момента холостого
хода и полезного момента, пересекает
ось ординат в точке, соответствующей
![]() ,
а затем она почти прямолинейна и лишь
немного изгибается вверх.
,
а затем она почти прямолинейна и лишь
немного изгибается вверх.
ЛАБОРАТОРНАЯ РАБОТА 11