3. Задания на контрольную работу
Студенты третьего курса специальности 160901 заочного обучения по дисциплине «Теория механизмов и машин» выполняют одну контрольную работу на тему «Исследование сложного зубчатого механизма».
При выполнении контрольной работы должны быть соблюдены следующие требования:
Контрольная работа должна строго соответствовать выбранному варианту.
Графическая часть работы аккуратно выполняется на листе формата АЗ или на листе миллиметровой бумаги (кроме синей) формата АЗ.
Пояснительная записка пишется четким почерком на листах формата А4. Решение должно сопровождаться краткими, ясными пояснениями, ссылками на применяемые законы и уравнения, изложение допускается вести в безличной форме. Формулы, встречающиеся в пояснительной записке, должны быть расположены отдельными строками. Структура титульного листа пояснительной записки приведена ниже.
Вычисление следует производить с точностью до двух значащих цифр после запятой.
Перед решением задачи в пояснительной записке записываются ее условия с числовыми данными, вычерчивается схема механизма без масштаба. На листе формата АЗ все чертежи выполняются в масштабе.
П ри
решении
задачи
необходимо
выполнить:
ри
решении
задачи
необходимо
выполнить:
Определить тип редуктора, его применимость.
Аналитически и графически определить передаточное отношение редуктора.
Определить основные характеристики планетарного редуктора, исходя из условий сборки, соседства, соосности (если в схеме планетарных редукторов больше одного - то основные характеристики выполнить для каждого планетарного редуктора). Число сателлитов «р» выбрать, исходя из величины передаточного отношения.
Выполнить силовой расчет редуктора. Считать колеса редуктора нулевыми. Модули колес принять равными т = 1 мм. или т = 1,5 мм. или т = 2 мм. План зубчатого механизма вычертить в масштабе.
5. Осуществить проверку правильности выполнения силового расчета по равенству мощностей на входе и выходе редуктора.
{Мвх-сдвх = Мвых -СОёых) при /I =1,
где ^ - коэффициент полезного действия редуктора.
Определить коэффициент полезного действия (КПД) редуктора.
Определить мощность и число оборотов двигателя.
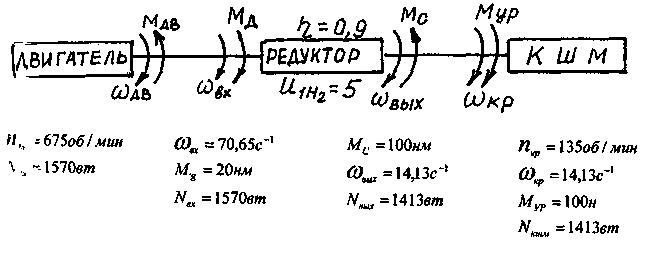
В общем виде вычертить схему привода кривошипно -шатунного механизма (КШМ), определив и обозначив кинематические и силовые характеристики на каждом валу схемы.
Во время экзаменационной сессии студент выполняет лабораторную работу, защищает проверенную преподавателем контрольную работу, сдает дифференцированный зачет по всему курсу, содержание которого представлено на страницах 4-6 данного пособия.
Номер задания студент выбирает по приведенной ниже таблице 2 в соответствии с первой буквой своей фамилии.
68
Таблица 2
Начальные |
г——— — |
Частота вращения |
|
Момент |
буквы |
№ |
(число оборотов) |
Направление |
сопротив- |
фамилий |
задания |
на выходе |
вращения |
ления на |
студентов |
|
из редуктора, |
выходного |
выходном |
|
|
/2- , об/мин |
вала |
валу, Мс, нм |
1 А |
1 |
250 |
по часов.стр. |
40 |
Б |
2 |
390 |
против час. |
60 |
В |
3 |
НО |
по часов.стр. |
80 |
Г |
4 |
170 |
протвдчас. |
100 |
Д |
5 |
420 |
по час. стр. |
50 |
Е |
6 |
140 |
против час. |
70 |
Ж |
7 |
200 |
по час. стр. |
90 |
3 |
8 |
180 |
против час. |
150 |
и |
9 |
300 |
по час. стр. |
130 |
к |
10 |
320 |
против час. |
110 |
л |
11 |
160 |
по час. стр. |
200 |
м |
12 |
220 |
против час. |
190 |
н |
13 |
120 |
по час. стр. |
140 |
О |
14 |
230 |
против час. |
120 |
п |
15 |
250 |
по час. стр. |
170 |
р |
16 |
270 |
против час. |
160 |
с |
* 17 |
100 |
по час. стр. |
180 |
т |
18 |
130 |
против час. |
210 |
У |
19 |
150 |
по час. стр. |
250 |
ф |
20 |
170 |
против час. |
240 |
X |
21 |
190 |
по час. стр. |
230 |
ц |
22 |
290 |
против час. |
220 |
ч |
23 |
310 |
по час. стр. |
75 |
ш |
24 |
330 |
против час. |
85 |
щ,э |
25 |
350 |
по час. стр. |
95 |
ю |
26 |
400 |
против час. |
115 |
я |
27 |
380 — |
по час. стр. |
125 |
I
4. Пример выполнения контрольной работы
Исходные данные: схема зубчатого механизма (рис. 37), числа зубьев колес
21 =80 22 = 30 23 = 20
2, = 16 25 = 16 23' = 48.
Направление вращения тихоходного вала на выходе редуктора (вала водила Н2) - по часовой стрелке, (л)цг.~ 14,13 с"1; что соответствует /г,^ = 135 об/мин. Момент сопротивления на тихоходном (выходном) валу редуктора М„2 = Мс = 100 нм. Определить: провести исследование сложного зубчатого механизма.
1. Определить тип редуктора.
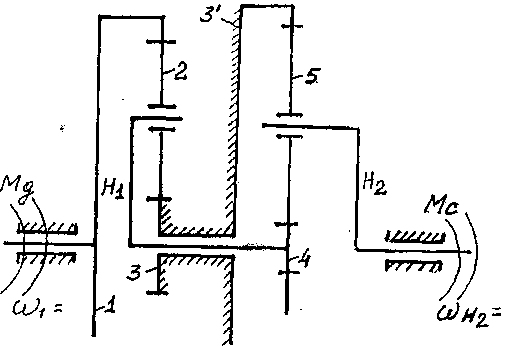
Данный редуктор - сложный планетарный механизм, состоит из двух планетарных редукторов, т.к. в каждом редукторе есть солнечное колесо (1 и 4), сателлиты (2 и 5), опорные колеса (3 и 3) и водила (Н1 и Н2). Первая ступень - редуктор Джемса, вторая ступень - тоже редуктор Джемса, Сочетание этих двух редукторов может быть применено в силовой быстроходной передаче.
Рис. 37. Схема многоступенчатого зубчатого механизма
2. Аналитически и графически определить передаточное отношение.
".«.=1-«»,, = 1-^— -—1 = 1+— = 1 + |? = 1 + 0,25 = 1,25; т п 2, 22] 2, 80
4Нг ° [ 24 2Ь\ 2, 16
И|Я2 =1,25-4 = 5.
б) Графически:
Чертим план зубчатого механизма. Выбираем модуль колес, принимаем т = 1,5 мм и определяем размеры колес для зубчатого механизма.
г, = 80; </, = т%, = 1,5 • 80 = 120мм \ г, = 0,06.и;
г2 = 30; с12 = /и2, = 1,5 • 30 = 45мм; г, = 0,0225.м \
2Э=20; (/3=/и2з=1,5-20 = 30.ш<; г3=0,015.«;
2„=1б; (/4=ш24=1,5 16 = 24л(.и; г, =0,012.«;
г ,=48; 1/,=т2,=1,5-48 = 72д|.и; л=0,036.и;
ззз з
г5=1б; ^5=т25 =1,5-16 = 24.1ш; /-5=0,012л*.
Тогда А =——— =-7-г-= 0,001 м/мм. гогда ^ «, РА(герт) 60
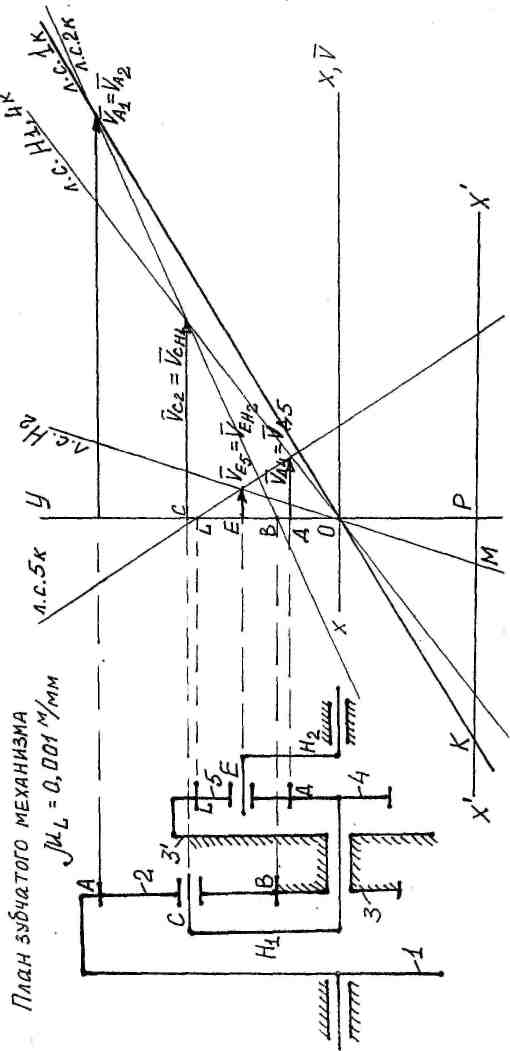
Для вычерченного в масштабе зубчатого механизма строим план
скоростей (рис. 38).
Выбираем систему координат УОХ, в которой откладываем произвольный вектор скорости точки А колеса 1-1^^, через конец вектора Щц и точку О проводим линию скоростей 1 колеса (л.с. 1 к). В точке А Ци* ?Аг. %% - вектор окружной скорости сателлита 2. В точке «В» находится мгновенный центр скоростей сателлита 2, через конец вектора и точку «В» проведем линию скоростей сателлита (л.с. 2 к). В точке „С скорость сателлита 2 и скорость водила Н, совпадают, проведем из точки С вектор 7сг = %щ Д° пересечения с линией скоростей сателлита. Через конец вектора УСщ и точку О проведем линию скоростей водила (л.с. Н,), которая является одновременно линией скоростей колеса 4,
1
о о
Ц
■4!
Найдем на этой линии скорость точки Д колеса 4 - у,и = Уд5. Колесо
5 - сателлит, мгновенный центр скоростей которого находится в точке I, поэтому через конец вектора скорости точки Д4 и точку Ь проведем л.с.бк - сателлита 5. В точке Е скорость колеса 5 - сателлита и водила Н2 совпадают Ур.ь=Уе.нг, поэтому из точки Е проведем вектор скорости до пересечения с л.с.бк, получим вектор скорости водила уЕ„2 , через конец вектора уЕн2 и точку О проведем л.с.Н2.Ллан скоростей построен. Для определения передаточного отношения на произвольном расстоянии ОР параллельно оси х - х проводим линию х' - х' , которая пересекает л.с.1к в точке К и л.с.Н2 - в точке М. Передаточное отношение
и» МР \\,5мм
Знак передаточного отношения положительный - отрезки КР и МР лежат в одной четверти.
3. Определить основные характеристики редуктора:
а) условие сборки:
- для редуктора 1 — 2 — 3 — Н1
г,+гг=кр; 80+20 = 254. Берем 4 сателлита, в этом случае условие сборки соблюдается.
- для редуктора 4 - 5 - 3' - Н2
г,+2г,=КР; 16 + 48 = 16-4,
р = 4, в этом случае условие сборки соблюдается.
б) условие соседства:
- для редуктора 1-2-3 -НЬ
1. (г, -г2Ут7Г/р^.22+2 - внутреннее зацепление
(80-30)5т180°/4 >30+2
50-0,71 > 32 - условие соблюдается.
2. (22+г3)зтж/р^г2+2
(30 + 20)зт180°/4 > 30+2
500,71 > 32- условие соблюдается.
- для редуктора 4 - 5 - 3' - Н2
1. \2,-г5)вт7Г/р^г$+2 - внутреннее зацепление
(48-1б)ып180'74 > 16+2
320,71 > 18 - условие соблюдается.
2. (г, + 25)8шл/р>25 +2 -внешнеезацепление (16+1б)8ш180°/4 > 16+2
320,71 > 18 - условие соблюдается.
в) условие соосности:
- для редуктора 1—2-3 -Н!
2) + 22 = 2, — 22 20 + 30 = 80-30
50 = 50 - условие соблюдается.
- для редуктора 4 - 5 - 3'- Н2 - 7и + 25 = 2з< - 2-5 или 16 + 16 = 48 - 16; 32 = 32 - условие соблюдается.
Таким образом, условия сборки, соседства и соосности для обеих зубчатых механизмов (редукторов) соблюдаются при р = 4. 4. Выполним силовой расчет редуктора.
Силовой расчет редуктора заключается в определении усилий в зацеплениях, усилий на валах и усилий в подшипниках водила. Силовой расчет проводим без учета КПД редуктора, т.е. при ф, *' 1.
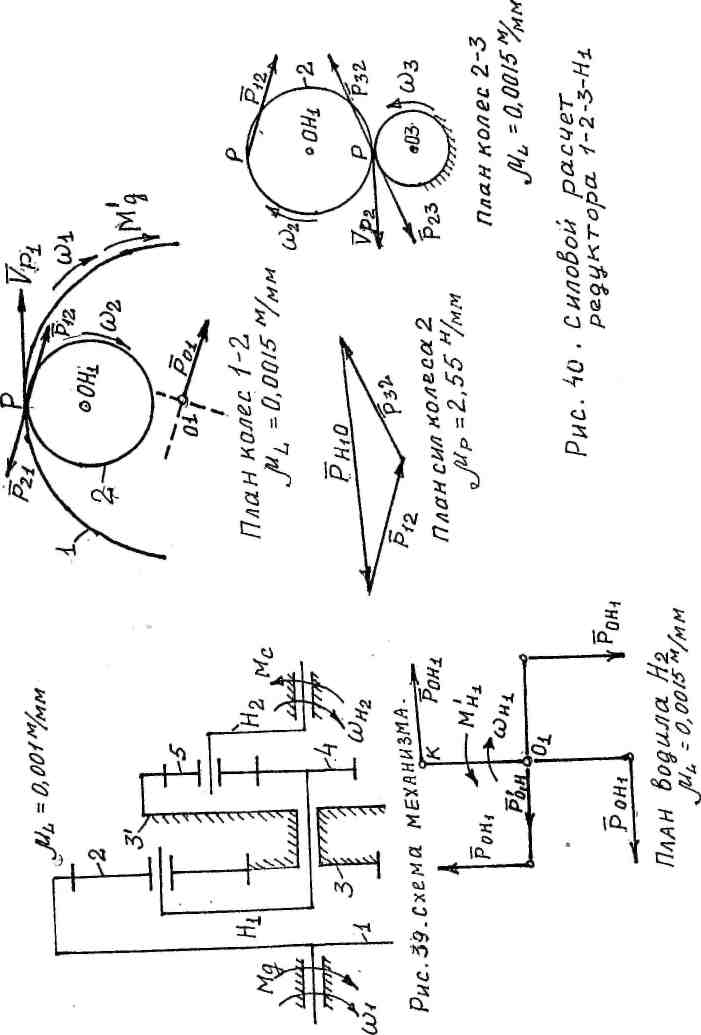
а) Вычерчиваем в масштабе план сложного зубчатого механизма (рис. 39). Предположим, направление вращения водила Н2 - по часовой стрелке (отмечаем на чертеже, рис. 39), тогда направление момента сопротивления Мс на валу водила Н2 - в противоположную сторону (момент сопротивления всегда направлен в сторону, противоположную направлению со , в данном случае (л)нг )■ Знак передаточного отношения зубчатого механизма положительный, значит направление вращения вала на входе в редуктор (00^ ) совпадает с направлением вращения вала ведомого водила (СОщ )• направление вращения вала колеса 1 отмечаем на чертеже, рис. 39. Направление движущего момента (Мд - на валу колеса 1) всегда совпадает с направлением вращения ведущего колеса (отмечаем направление Мэ на чертеже, рис.39).
б) Определяем СОх и Мэ на входе в редуктор м ,00
Ш& *й)4 ъШщг&шж* 14,13-5 = 70,65 6"'; Мвх= Мд=^-=-т?-20нм.
в) Силовой расчет планетарного редуктора - нужно всегда начинать с солнечного колеса, в данном случае - это колесо 1 - ведущее. Колесо 2 - сателлит - ведомое и ведущее, колесо 3 — условно ведомое.
1. В масштабе^ = -—;—\=^~ = 0,0015 м/мм вычерчиваем
план колес 1-2 (рис.40). В редукторе 1-2-3-Н! имеется четыре симметрично расположенных сателлита, поэтому движущий момент равномерно распределяется между всеми сателлитами. Расчет ведется по одному сателлиту, поэтому М$ - -Ц& - 4г - &нм-
Силы взаимодействия колес 1 и 2 приложены в точке Р (полюс зацепления) и направлены по нормали к профилям зубьев (по линии зацепления ММ), угол зацеплениям^ 20. Сила Р12 сила реакции со стороны ведущего колеса 1 на ведомое колесо 2. Сила Р21 - сила реакции со стороны ведомого колеса 2 на ведущее колесо 1.
если ведущим является колесо с внутренним зацеплением, то поворачивая вектор окружной скорости уР, на угол сс0 (а0=20°) по направлению угловой скорости ведущего колеса, получим положение нормали N - N и вектор силы реакции ведущего колеса на ведомое (?|2). Вектор ?21 = -?12.
Рассматриваем равновесие колеса 1. Колесо 1 находится в равновесии под действием силы ~ри, момента м\ и реакции на валу Лн. 3>0,(?)=о,
Р21-А-Л^=0
м\
А = —'-; к = к • сов 20° = 0,06 • 0,94 = 0,056л<;
/>"= в=89'3"; Ря = ~ла''" = 89,зм ■
/>21 + Яш = 0; Ргх = -Рт , Р01 = 89,3н.
2. В масштабе 0,0015 м/м вычерчиваем план колес 2-3 (рис. 4#). В точке Р определяем положение нормали NN по правилу: если ведущим является колесо с внешним зацеплением (колесо 2), то поворачивая вектор окружной скорости точки Р уп на угол а„ (аш =20°) против направления вращения угловой скорости ведущего колеса а>г, получим положение нормали N - N и вектор силы реакции ведущего колеса на ведомое (здесь условно ведомое колесо 3) ?23, ?и = -?32.
Рассматриваем равновесие колеса 2 (сателлита)
Здесь а, = й2 =г2 -сова, значит|А32|=|;;2|. и р32 =89,зя.
Графически решаем это уравнение, т.е. строим план сил, который должен быть замкнут (рис. 63).
89 3
Масштаб плана сил цР = -—=- = 2,55н/лш.
^' 35 Рн„=Рн,о р,е =65-2,55 = 165,75», Р =-Р
г Я,0 ' ОН, '

ОгК = г2+г} = 0,0225м + 0,015м = 0,0375м. О 0175
На чертеже о.к = '±^± = гъмм.
г ' 0,0015
Рассматриваем равновесие одной ветви водила. Одна ветвь водила находится в равновесии под действием силыр()Я , м'н и рон.
м'н = рон, ■ 0,К = 165,75н-0,0375м = 6,21нм.
^]? = 0, Рон, +~Ро,н =0, Р~он, =-Рохн, Рон, = 165,75н.
Как видно из чертежа, каждая ветвь водила имеет реакцию со стороны вала ?0,« = Ш,75», и суммарная реакция со стороны вала равна нулю, значит вал водила уравновешен.
Для остальных ветвей водила расчет тот же, поэтому момент на
Валу ВОДИЛа Н, равен М„ = м'„ 4 = 6,21-4 = 24,84км.
Этот же момент действует на валу колеса 4, т.е. м„ =мн и со„ = сол.
4. Проводим силовой расчет редуктора 4 - 3' - 5' - Н2, рис. 4 т. Отметим, вал водила Н1 и колеса 4 находится в равновесии, поэтому мн, =-М<, или по другому: водило (-Ц для редуктора 1 - 2 - 3 - И^
является ведомым, а колесо 4 для редуктора 4 - 5 - 3' - Н2 ведущим, поэтому направление вращения со, (по часовой стрелке) совпадает с направлением момента м„.
- В масштабе ц1 =о,оо\м1мм вычерчиваем план колес 4-5, отметим, колесо 4 - ведущее, колесо 5 - сателлит - ведомое.
Рассмотрим равновесие колеса 4. В редукторе четыре симметрично расположенных сателлита, поэтому М4=л/,/4=24,84/4 = б,21нл<.
Колесо 4 находится в равновесии под действием силы я», момента м\ и силы ?<м. 5>„(р)=°. Р»к-м\=о,
Л = г4со820° = 0,012-0,94 = 0,0113^,
^=^ = -^_ = 549,55„, Н 0,0113
Л* =-/"«. Л5=549,55н.
1?=_о,
Р»+Р04=0, Р54=-Р„,
/> =549,55н.
Рис. И Силовой расчет {
рЕДУНТООА ^-5-3 ~Н2.
Рассматриваем равновесие колеса 5 - сателлита. Сателлит 5 находится в равновесии под действием сил р3'5, ?« и силы действия водила Н2 на сателлит 5 р~н2о . 2>„(?)=о, р„ь,-р,;Н,=о,
Р, = р = 549,55н.
3 5 45 ' ,
/5з,5+Р45 + Ря2о = о, решаем это уравнение графически.
Строим план сил в масштабе/^ =—— = 18,з«/лш и определяем р„10,
РИг0 ттф, = 6018,3 = 1098н.
- В масштабе //, =ШИ= °'0П+0'Ш
=о,ооо!м/мм
строим план
л1
ОА 35
водила Н2 (4 ветви).
Рассмотрим равновесие одной ветви водила. Ветвь водила
находится в равновесии под действием сил рон , р'он и момента м'„ .
2>.(?)=о, м'Н1-рон^н = о,
й = 0,024-сое 20°,
Л^, = 1098 • 0,024 • 0,94 =24,77™.
Для остальных ветвей водила расчет тот же, поэтому момент на валу водила Н2 равен
М„ =МН ■4 = 24,77-4 = 99,0&нм*100нм.
н2 нг
Отметим направление момента м„ , угловая скорость совпадает с
направлением момента и угловой скорости на выходе из редуктора, определенного по заданному направлению угловой скорости.
Проверяем правильность расчетов. Составим уравнение мощности на входе и выходе редуктора (энергетическое равенство),
М1Фх=МнСОн, при УСЛОВИИ 77 = 1. М,ЦН2=МН2. 20нм ■ 5 = Шнм. В
расчете получили мнг =99,08км. Процент ошибки 0,9 %. Расчет проведен верно.
5. Определяем КПД редуктора.
Ч\Нг =Ч\ИХ 'Ч4Нг ■
^ш,=^-[1-?7'(1-",я)].
ищ =1,25; 77'=0,95 •0,95 = 0,9,
7.я, =^[1-0,9(1-1,25)1=0,98,
Чщ =7Г-[1-;7'(1-",«)]=1[1-0.9(1-4)] = 0,92,
И4Н2 4
Цщ =0,98 0,92 = 0,9.
6. Определяем мощность на выходе из редуктора, мощность на нходе в редуктор, мощность и число оборотов двигателя.
- мощность на выходе из редуктора равна мощности необходимой для преодоления сил сопротивления в кривошипно- шатунном механизме, по данным мощность кшм равна
Яъш^Фщшт, -Му,, = 14,13100 = 1413вт
Значит мощность на выходе из редуктора л^ =1413вот.
- мощность на входе в редуктор определим с учетом КПД, югда лг„ -Д-.-Шыявв. Ы+'ПчИ^
77 °'у
- мощность двигателя совпадает с мощностью на входе в I аддуктор, тогда ыл = #„.Л = 1 твт.
Число оборотов двигателя равно числу оборотов на валу входа в
родуктор.
по, =п«.р. *Л«й..>Ц»1 =135-5 = 675об/л<ин.
7. Вычерчиваем схему привода КШМ с учетом направления нращения валов и силовых характеристик на каждом валу схемы.