

Раздел 3. Нелинейные системы автоматического управления
3.1 Примеры учёта нелинейностей в реальных системах автоматического управления. Характеристики нелинейных звеньев
Существует множество систем, процессы в которых принципиально не могут быть описаны линейными дифференциальными уравнениями, и при их исследовании необходимо пользоваться нелинейными дифференциальными уравнениями.
Переход к нелинейным дифференциальным уравнениям определяется как учётом нелинейностей реальных характеристик элементов системы, так и дополнительным введением в систему элементов с существенно нелинейными характеристиками.
Обычно в первом случае нелинейности учитывают для рассмотрения изменения качества процесса управления за счёт влияния нелинейностей, присущих реальной системе, и исправления нежелательного эффекта, возникающего под влиянием этих нелинейностей.
Во втором случае речь идет о повышении качества процессов или о получении принципиально новых алгоритмов в управлении за счёт введения дополнительных нелинейных элементов. При этом удаётся повысить быстродействие и точность системы, уменьшить перерегулирование или компенсировать нежелательное действие имеющихся нелинейностей.
Если в линейных системах работоспособными оказываются только устойчивые системы и появление нарастающих колебаний рассматривают как недопустимое явление, то в нелинейных системах вопрос об устойчивости ставят иначе.
Существует большое число нелинейных автоколебательных систем управления, в которых колебания являются свойством нормального режима работы системы. В этом случае под устойчивой работой системы понимают устойчивость автоколебаний в неустойчивой, с точки зрения линейной теории, системе. Само по себе определение устойчивости в этом случае изменяется. В линейных системах признаком устойчивости является возврат системы в исходное состояние при снижении внешнего воздействия до нуля.
Такую устойчивость называют асимптотической, или устойчивостью в точке. Этим понятием можно пользоваться и для характеристики нелинейных систем.
Однако в нелинейных системах большее значение имеет устойчивость в некоторой области, характеризующаяся возвратом системы в заданную область при уменьшении внешнего воздействия до нуля. При оценке устойчивости обоих видов применяют понятия устойчивости в малом, в большом и в целом, введенные в связи с рассмотрением процессов в нелинейных системах.
При изучении нелинейных систем неприменим принцип наложения: при сложных воздействиях процесс в системе не может быть представлен как сумма процессов, получающихся от каждой из составляющих воздействия в отдельности. Это обстоятельство чрезвычайно осложняет количественный анализ нелинейных систем автоматического управления.
Рассмотрим примеры систем автоматического управления, в которых надо учитывать нелинейность характеристик.
Система стабилизации курса. Для стабилизации курса корабля, торпеды или летательного аппарата применяются системы автоматического управления рулями, обеспечивающие поддержание неизменным заданного курса. Простейшая система стабилизации курса показана на рисунке 3.1.1, а.
Объект схематически
изображен в виде корабля 1, ось
которого составляет угол
![]() с заданным курсом
с заданным курсом
![]() ,
фиксируемым гироскопическим компасом
2. Отклонение от курса
,
фиксируемым гироскопическим компасом
2. Отклонение от курса
![]() воздействует при помощи усилителя
гироскопического компаса на рулевую
машинку 3, через соответствующую
передачу, поворачивающую руль 4
корабля на угол
воздействует при помощи усилителя
гироскопического компаса на рулевую
машинку 3, через соответствующую
передачу, поворачивающую руль 4
корабля на угол
![]() .
.
На рисунке 3.1.1, б
схематически показан привод пневматической
рулевой машинки. Заслонка, управляющая
подачей воздуха в рабочий цилиндр
двигателя, поворачивается на угол
![]() ,
создавая этим перепад давления воздуха
в рабочем цилиндре и перемещение y
поршня. Перемещение рабочего поршня
ограничено упорами и может происходить
при
,
создавая этим перепад давления воздуха
в рабочем цилиндре и перемещение y
поршня. Перемещение рабочего поршня
ограничено упорами и может происходить
при
![]() .
.

Рисунок 3.1.1 – Управление курсом корабля
Зависимость между
скоростью
![]() движения поршня и положением
управляющей заслонки выражается графиком
(рисунок 3.1.1, в). При любом значении
y, лежащем в пределах
от
движения поршня и положением
управляющей заслонки выражается графиком
(рисунок 3.1.1, в). При любом значении
y, лежащем в пределах
от
![]() до
до
![]() .
эта зависимость сохраняется и имеет
вид симметричной кривой с областями
нечувствительности и насыщения. Однако
как только рабочий поршень достигает
упора, он останавливается; если дальнейшее
изменение
соответствует прижатию поршня к упору,
то скорость поршня остается равной
нулю при любом значении
.
.
эта зависимость сохраняется и имеет
вид симметричной кривой с областями
нечувствительности и насыщения. Однако
как только рабочий поршень достигает
упора, он останавливается; если дальнейшее
изменение
соответствует прижатию поршня к упору,
то скорость поршня остается равной
нулю при любом значении
.
Таким образом,
скорость
![]() движения поршня является функцией двух
переменных
движения поршня является функцией двух
переменных
![]() и выражается следующими уравнениями:
и выражается следующими уравнениями:
![]() (3.1.1)
(3.1.1)
Переход с кривой
![]() на прямую
на прямую
![]() происходит скачком при
происходит скачком при
![]() (штриховая линия на рисунке 3.1.1, в).
(штриховая линия на рисунке 3.1.1, в).
В системе передачи от рулевой машинки к перу руля могут быть зазоры, создающие неоднозначную зависимость.
Таким образом, даже при упрощенном рассмотрении система стабилизации курса содержит две нелинейности, обусловленные упорами и зазорами системы передачи.
Структурная схема
рассматриваемой системы показана на
рисунке 3.1.1, г. Здесь принято, что
объект описывается инерционно-интегрирующим
звеном 1, а усилитель гироскопа и
корректирующая обратная связь по
положению руля — пропорциональными
звеньями 2, 5 с коэффициентами
передачи
![]() и
и
![]() .
Систему управления рулем описывают
нелинейные звенья 3 и 4.
.
Систему управления рулем описывают
нелинейные звенья 3 и 4.
Случайные возмущающие воздействия, приведенные к углу поворота руля, обозначены составляющей f.
При изучении линейных систем рассматривались методы повышения качества переходных процессов за счёт введения линейных корректирующих устройств. Применение нелинейных элементов в схемах управления значительно расширяет возможности повышения качества переходных процессов в системе.
Нелинейная
коррекция непрерывных систем.
Рассмотрим отработку скачка
![]() простейшей следящей системой при двух
различных значениях коэффициента
усиления (рисунок 3.1.2, а).
простейшей следящей системой при двух
различных значениях коэффициента
усиления (рисунок 3.1.2, а).
При большом
коэффициенте усиления (кривая
![]() )
процесс носит резко колебательный
характер, величина перерегулирования
велика и время
)
процесс носит резко колебательный
характер, величина перерегулирования
велика и время
![]() ,
в течение которого наступает момент
равенства
,
в течение которого наступает момент
равенства
![]() и
и
![]() мало. При малом коэффициенте усиления
(кривая
мало. При малом коэффициенте усиления
(кривая
![]() )
процесс протекает апериодически,
перерегулирование отсутствует, и время
компенсации рассогласования
)
процесс протекает апериодически,
перерегулирование отсутствует, и время
компенсации рассогласования
![]() велико. Естественно, возникает стремление
создать такую систему, которая, имея
высокий коэффициент усиления при
больших рассогласованиях
велико. Естественно, возникает стремление
создать такую систему, которая, имея
высокий коэффициент усиления при
больших рассогласованиях
![]() ,
уменьшала бы его по мере уменьшения
рассогласования. В этом случае переходный
процесс должен иметь вид кривой
,
уменьшала бы его по мере уменьшения
рассогласования. В этом случае переходный
процесс должен иметь вид кривой
![]() .
Уменьшение коэффициента усиления по
мере уменьшения рассогласования
достигается включением нелинейного
усилителя с характеристикой, представленной
на рисунке 3.1.2, б.
.
Уменьшение коэффициента усиления по
мере уменьшения рассогласования
достигается включением нелинейного
усилителя с характеристикой, представленной
на рисунке 3.1.2, б.

Рисунок 3.1.2 – Нелинейная коррекция непрерывных систем
В системах
автоматического управления встречаются
нелинейности самого различного
вида. Будем характеризовать каждую
нелинейность соответствующей
функцией
![]() .
При этом
будем считать, что имеет место одномерная
нелинейность, т.е. переменная z
представляет собой функцию только
одной переменной x.
Возможны случаи и многомерных
нелинейностей,
когда переменная z
— функция нескольких переменных.
.
При этом
будем считать, что имеет место одномерная
нелинейность, т.е. переменная z
представляет собой функцию только
одной переменной x.
Возможны случаи и многомерных
нелинейностей,
когда переменная z
— функция нескольких переменных.
Нелинейные звенья можно классифицировать по различным показателям: симметрии, гладкости, однозначности характеристик. Рассмотрим каждый из этих показателей.
Симметрия. Для нелинейных характеристик можно указать два типа симметрии:
1)
если функция
![]() удовлетворяет условию
удовлетворяет условию
![]() (3.1.2)
(3.1.2)
то такую характеристику называют симметричной относительно оси ординат, или чётно-симметричной.
2) если функция удовлетворяет условию
![]() (3.1.3)
(3.1.3)
то характеристику называют симметричной относительно начала координат, или нечётно-симметричной.
Характеристики, не удовлетворяющие ни одному из приведенных условий, называют несимметричными.
В ряде случаев
путём перемещения координат несимметричные
характеристики могут быть приведены
к симметричным. Перемещение начала
координат соответствует введению
дополнительных слагаемых на входе и
выходе звена. Например, для несимметричной
характеристики
![]() (рисунок 3.1.3, а, б) можно ввести
подстановку
(рисунок 3.1.3, а, б) можно ввести
подстановку
![]() так, чтобы полученная характеристика
так, чтобы полученная характеристика
![]() оказалась симметричной относительно
оси ординат. Такое преобразование
координат соответствует введению
сигнала
оказалась симметричной относительно
оси ординат. Такое преобразование
координат соответствует введению
сигнала
![]() на входе звена и переходу от несимметричной
характеристики
к чётно-симметричной
(рисунок 3.1.3, в, г).
на входе звена и переходу от несимметричной
характеристики
к чётно-симметричной
(рисунок 3.1.3, в, г).
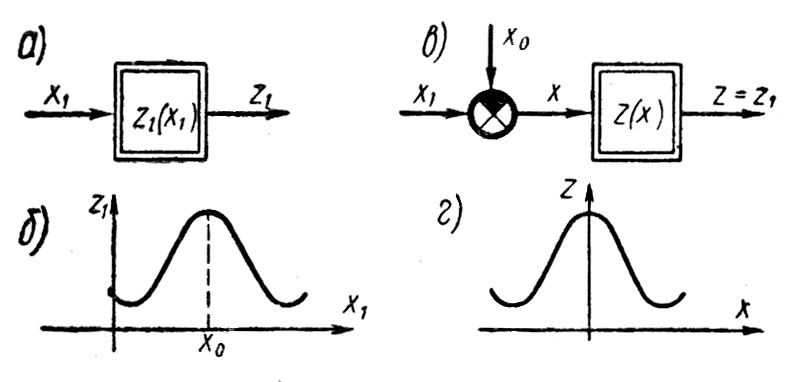
Рисунок 3.1.3 – Преобразование несимметричной статической характеристики в чётно-симметричную
Аналогично для
характеристики
(рисунок 3.1.4, а, б) можно путём
подстановки
и
![]() получить нечётно-симметричную
характеристику
.
Структурная схема и характеристика
,
соответствующая данному преобразованию
координат, показаны на рисунке 3.1.4, б
и г.
получить нечётно-симметричную
характеристику
.
Структурная схема и характеристика
,
соответствующая данному преобразованию
координат, показаны на рисунке 3.1.4, б
и г.

Рисунок 3.1.4 – Преобразование несимметричной статической характеристики в нечётно-симметричную
Гладкость.
Если в любой точке характеристики
существует производная
![]() ,
то характеристика относится к гладким.
Если на характеристике имеются изломы,
в которых производная
имеет разрыв, то характеристика относится
к ломаным. Большую группу ломаных
характеристик представляют кусочно-линейные
характеристики, состоящие из
отрезков прямых.
,
то характеристика относится к гладким.
Если на характеристике имеются изломы,
в которых производная
имеет разрыв, то характеристика относится
к ломаным. Большую группу ломаных
характеристик представляют кусочно-линейные
характеристики, состоящие из
отрезков прямых.
В ряде случаев с целью облегчения расчёта гладкие характеристики бывает удобно приближенно заменять кусочно-линейными ломаными.
Однозначность.
Если каждому значению x
соответствует одно определённое
значение z, то
характеристику называют однозначной.
Если каждому значению x
соответствует несколько значений z
в зависимости от режима, предшествовавшего
рассматриваемому моменту, то характеристику
называют многозначной. При этом
число возможных значений z
может лежать в пределах от 2 до
![]() .
.