

8. Имитационное моделирование параллельных механизмов
Известно значительно количество программных систем, которые включают в себя средства имитационного моделирования структурно-сложных гибридных систем. Эти программные системы можно условно разделить на три группы [15]:
системы “блочного моделирования”;
системы “физического моделирования”;
системы, ориентированные на схему гибридного автомата.
Ограничимся рассмотрением первых систем. Программные системы "блочного моделирования" используют в качестве входного языка графический язык иерархических блок-схем [16]. Элементарные блоки являются либо предопределенными, либо могут конструироваться с помощью некоторого специального вспомогательного низкоуровневого языка программирования. Новый блок можно собрать также из имеющихся блоков с использованием ориентированных связей и параметрической настройки.
К достоинствам подхода, реализованного в программных системах «блочного моделирования», следует отнести, прежде всего, простоту создания не очень сложных моделей (даже для не слишком подготовленного пользователя). В то же время, сложные модели порождают в этом подходе громоздкие многоуровневые блок-схемы, не отражающие естественной структуры моделируемой системы.
Наиболее известными представителями систем "блочного моделирования являются:
пакет расширения Simulink программного комплекса MatLab (компаниz MathWorks) [17];
система EASY5 компании Boeing;
подсистема SystemBuild программного комплекса MATRIXx (компания Integrated Systems);
система VisSim (компании Visual Solution);
система PRADIS (копании ЛАДУГА).
В работе используется первая из перечисленных программных систем. Пакет Simulink предназначен для математического моделирования линейных и нелинейных динамических систем и устройств, представленных своей функциональной блок-схемой, которая называется S-моделью или просто моделью. Simulink обеспечивает пользователю доступ ко всем возможностям программной системы MatLab, в том числе к ее большой библиотеке численных методов. Важно, что Simulink позволяет отображать поведение модели и результаты ее функционирования в процессе моделирования, а также изменять параметры модели даже в тот момент, когда она выполняется.
Для проектирования и анализа механических систем в рамках программной системы MatLab имеется модуль SimMechanics, представляющий собой расширение пакета Simulink [13]. Модуль SimMechanics содержит набор инструментов для задания параметров кинематических звеньев механической системы (масса, моменты инерции, геометрические параметры), кинематических ограничений, локальных систем координат, способов задания и измерения движений. Встроенные дополнительные инструменты визуализации Simulink позволяют получить упрощенные изображения трехмерных механизмов, как в статике, так и в динамике.
8.1. Трипод 2
Модель трипода 2 разработана для следующих
размеров механизма: радиус основания
![]() м;
радиус платформы
м;
радиус платформы
![]() м;
высота секции
м;
высота секции
![]() м;
толщина платформы
м;
толщина платформы
![]() м;
внутренние радиусы штанг
м;
внутренние радиусы штанг
![]() м;
внешний радиус центральной штанги
м;
внешний радиус центральной штанги
![]() м;
внешний радиус той же штанги
м;
внешний радиус той же штанги
![]() м;
внутренние радиусы подвижных штанг
м;
внешние радиусы подвижных штанг
м;
внутренние радиусы подвижных штанг
м;
внешние радиусы подвижных штанг
![]() м;
материал изделия – сталь.
м;
материал изделия – сталь.
Структурная схема модели механизма вместе с моделью блока управления представлена на рис. 8.1.
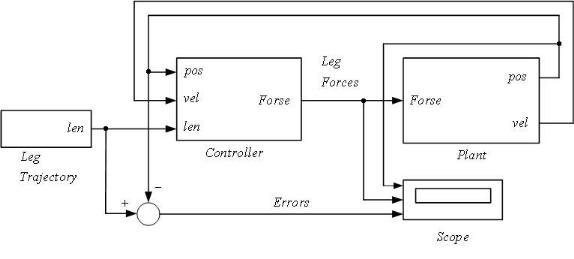
Рис. 8.1. Структурная схема Simulink-модели трипода 2
На рисунке приняты следующие обозначения: Leg Trajectory – блок расчета длин штанг; Controller – блок управления приводами трипода; Plant – блок, содержащий собственно модель механизма; Scope - блок «осциллографа».
Блок Leg Trajectory
(рис. 8.2) предназначен для формирования
желаемого закона движения платформы
путем задания соответствующих текущих
длин штанг механизма. В качестве примера,
на рисунке 8.2 приведено ступенчатое
входное воздействие STEP. MATLAB function –
компонент блока, вызывающий MatLab М-функцию,
которая вычисляет требуемые текущие
длины штанг. Reshape выполняет преобразование
приращения длины штанги в формат, который
может быть использован блоком Controller.
Nominal leg length – исходная длина штанги
![]() ,
,
![]() .
.
Овалами на рис. 8.2 и на других аналогичных рисунках, рассматриваемых ниже, обозначены порты, предназначенные для соединения данной подмодели с другими Simulink-подмоделями.
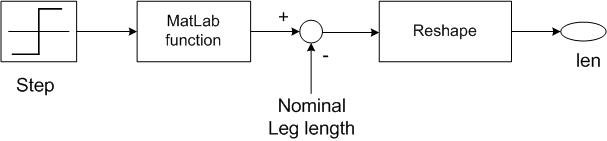
Рис. 8.2. Схема Simulink-модели блока Leg Trajectory для трипода 2
В качестве
блока Controller
рассматривается ПИД-регулятор,
Simulink-модель которого представлена на
рис. 8.3 [17]. На вход блока подаются требуемые
текущие длины штанг len,
фактические текущие их длины pos
и скорости изменения
vel.
Выходами блока являются управляющие
силовые воздействия Forse.
Величины
![]() представляют
собой коэффициенты усиления
пропорциональной, интегрирующей и
дифференцирующей частей регулятора
соответственно.
представляют
собой коэффициенты усиления
пропорциональной, интегрирующей и
дифференцирующей частей регулятора
соответственно.
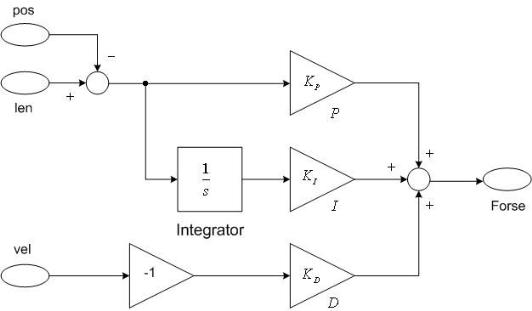
Рис. 8.3. Схема Simulink-модели блока Controller
Блок Plant представляет собой модель собственно рассматриваемого механизма (рис. 8.4).
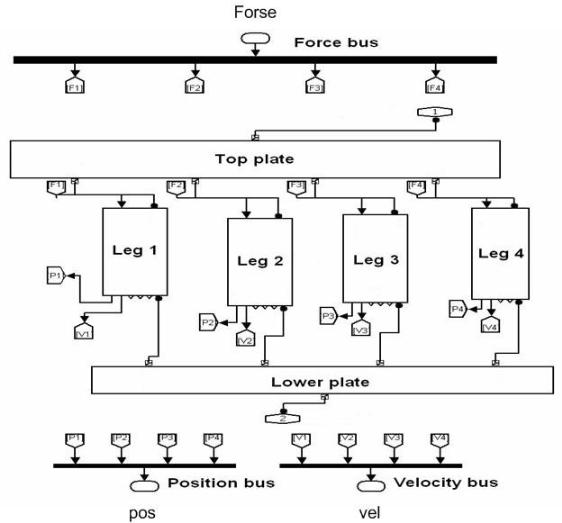
Рис. 8.4. Схема Simulink-модели блока Plant для трипода 2
Компонент
![]() на
рис. 8.4 соответствует модели центральной
пассивной штанги механизма (рис. 8.5б), а
компоненты
на
рис. 8.4 соответствует модели центральной
пассивной штанги механизма (рис. 8.5б), а
компоненты
![]() ,
,
![]() ,
,
![]() -
моделям активных штанг (рис. 8.5а). Компонент
Top plate моделирует
инерциальные свойства платформы
механизма. Входами блока являются
управляющие силовые воздействия Forse,
а выходами – позиции pos
и скорости vel
штанг механизма.
-
моделям активных штанг (рис. 8.5а). Компонент
Top plate моделирует
инерциальные свойства платформы
механизма. Входами блока являются
управляющие силовые воздействия Forse,
а выходами – позиции pos
и скорости vel
штанг механизма.
Блок Scope является вспомогательным и служит для графического представления результатов моделирования.
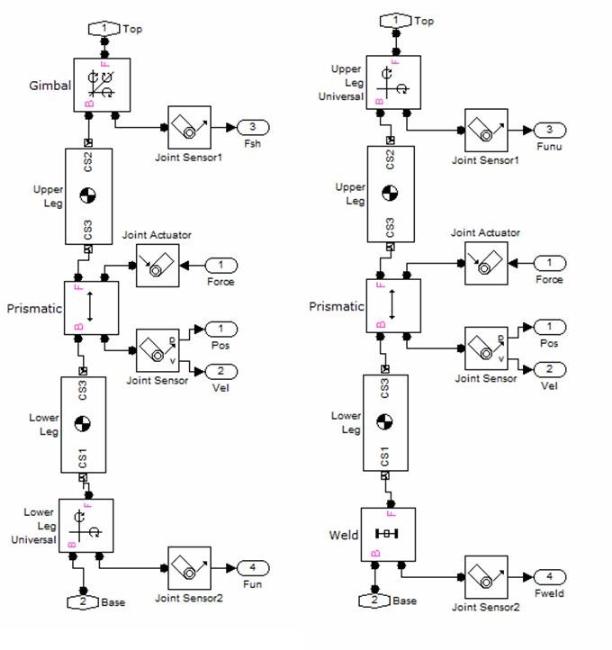
а) б)
Рис. 8.5. Схемы Simulink-моделей штанг механизма:
а) активная штанга; б) пассивная штанга
На рисунке 8.5 приняты следующие обозначения: Prismatic, Gimbal, Universal - модели призматической, цилиндрической и карданной кинематических пар соответственно; Weld – модель сварного соединения; Lower Leg, Upper Leg – модель нижней и верхней полуштанг; Joint Sensor1, Joint Sensor2 – сенсоры усилий в соответствующих кинематических парах; Joint Sensor – сенсор изменения длин и скоростей соответствующих штанг.