

7. Кинематика и динамика гексапода 6
Обратная задача кинематики для гексапода рассмотрена в п. 6.1. Поэтому сразу перейдем к рассмотрению прямой задачи.
7.1. Прямая задача кинематики. Примем обозначения и допущения, принятые в п. 6.2. Свяжем с основанием систему координат , а с платформой – систему координат (рис. 7.1).
Положение шарниров
,
![]() в
системе координат
определяется,
соответственно, векторами
в
системе координат
определяется,
соответственно, векторами
, , . (7.1)
Положение платформы относительно
основания задается углами Эйлера
(рис.
6.5) и вектором
![]() .
.
Подобно тому, как это сделано в п. 6, геометрические соотношения между системами координат , определим с помощью ( )-матрицы однородных преобразований
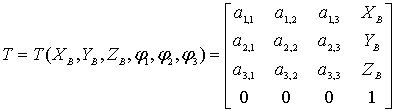 .
.
Таким образом, положение шарнира , в системе координат задается вектором
 .
(7.2)
.
(7.2)
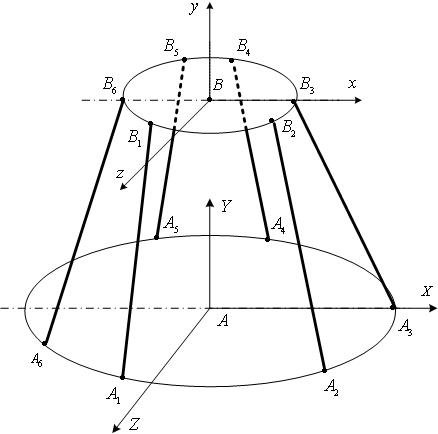
Рис. 7.1. Геометрия гексапода 6
Из формул (7.1), (7.2) следует, что обобщенную
координату
,
как функцию величин
![]() ,
можно определить формулой
,
можно определить формулой
![]() ,
.
(7.3)
,
.
(7.3)
Выражения для линейных и угловых скоростей и ускорений концов штанг можно найти, дифференцируя и дважды дифференцируя по выражения (7.3). Однако эти выражения оказываются слишком громоздкими и мало пригодными для практического использования. Исследование скоростей и ускорений концов штанг проще производить с помощью имитационного моделирования (см. п. 8).
Заметим, что во введенных обозначениях углы между штангой , и осями системы координат определяются выражением
 ,
,
,
,
где углы
![]() ,
,
![]() ,
,
![]() -
углы между штангой
и
осями
,
,
соответственно.
-
углы между штангой
и
осями
,
,
соответственно.
7.2. Динамика механизма. По методике, использованной в п. 6.3, найдем уравнения движения платформы в форме уравнений Лагранжа
, , (7.4)
где
-
кинетическая энергия системы;
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() -
обобщенные координаты;
-
обобщенная сила, соответствующая
-ой
обобщенной координате.
-
обобщенные координаты;
-
обобщенная сила, соответствующая
-ой
обобщенной координате.
Положим, что платформа, как твердое тело, симметрична относительно оси , так что ее моменты инерции равны: (рис. 7.1).
Массу платформы обозначим . В таком случае ее кинетическая энергия равна
 .
(7.5)
.
(7.5)
Выпишем силы, действующие на платформу, а также радиусы-векторы , , точек их приложения в проекциях на оси системы координат (рис. 6.6):
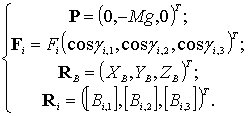 (7.6)
(7.6)
Нам далее понадобятся матрицы Якоби
векторов
![]()
![]() ,
.
Аналогично тому, как это сделано в
п. 6.3, из (7.6) имеем:
,
.
Аналогично тому, как это сделано в
п. 6.3, из (7.6) имеем:
 ;
;
 ;
;
 ;
;


![]()

 ;
;
 ;
;
![]()
 ;
;
 ;
;
Составим выражение для работы на элементарных приращениях и, в соответствии с методикой составления уравнений Лагранжа, приравняем его нулю:
. (7.7)
Здесь
![]() ,
,
![]() ,
-
,
-
векторы элементарных приращений.
Поскольку
![]() ,
очевидно равенство
,
очевидно равенство
![]() .
Таким образом, из выражений для компонентов
матриц
,
следует,
что элементы вектора
определяются
следующим образом:
.
Таким образом, из выражений для компонентов
матриц
,
следует,
что элементы вектора
определяются
следующим образом:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Аналогично п. 6.3, в приведенных выше выражениях для , , обозначим коэффициент при , . В этих обозначениях получим более компактные выражения для элементарных приращений , , :
![]() ;
(7.8)
;
(7.8)
![]() ;
(7.9)
;
(7.9)
![]() .
(7.10)
.
(7.10)
Подставив выражения (7.8) – (7.10) в (7.7), после несложных преобразований получим выражение
![]()
![]()
![]()
![]() +
.
+
.
Приравнивание в последнем выражении
коэффициентов при независимых приращениях
![]() ,
дает следующие значения обобщенных
сил:
,
дает следующие значения обобщенных
сил:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
Подставляя в уравнения (7.4) полученные выражения для обобщенных сил, а также выражения для кинетической энергии системы (7.5), получим искомую систему обыкновенных дифференциальных уравнений
![]()
![]() ,
,
![]() ,
,
![]()
![]() ,
(7.11)
,
(7.11)
, (7.12)
, (7.13)
![]() .
(7.14)
.
(7.14)
В уравнениях (7.11) - (7.14) силы
![]() -
это внешние (управляющие) силы, которые
могут быть заданы как функции времени,
как функции обобщенных координат
-
это внешние (управляющие) силы, которые
могут быть заданы как функции времени,
как функции обобщенных координат
![]() ,
а также как функции длин «своих» штанг
,
а также как функции длин «своих» штанг
![]() .
Наоборот, при заданных законах изменения
величин
из
этих уравнений могут быть найдены
необходимые управляющие силы, как
функции времени.
.
Наоборот, при заданных законах изменения
величин
из
этих уравнений могут быть найдены
необходимые управляющие силы, как
функции времени.