

6. Кинематика и динамика гексапода 4
6.1. Обратная задача кинематики. Для гексапода (рис. 6.1) обратная кинематическая задача решается аналогично тому, как это сделано для трипода (п. 4).
Пусть обобщенными координатами
![]() являются
длины штанг
,
,…,
являются
длины штанг
,
,…,![]() соответственно. Пусть также в неподвижной
декартовой системе координат
координаты
точек
соответственно. Пусть также в неподвижной
декартовой системе координат
координаты
точек
![]() равны
,
а точек
равны
,
а точек
![]() -
,
где
-
,
где
![]() ,
,
![]() .
.
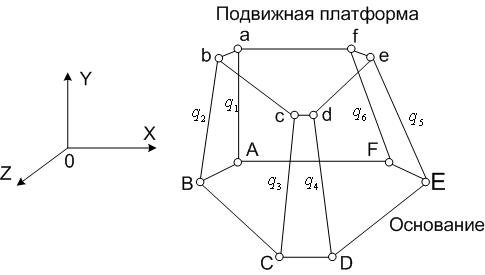
Рис. 6.1. Схема гексапода:
![]() -
обобщенные координаты
-
обобщенные координаты
Во введенных обозначениях решение обратной задачи кинематики для любого гексапода дает следующая система уравнений:
![]() ;
;
![]() ;
;
…
![]() .
.
6.2. Прямая задача кинематики. Пусть
,
,
![]() -
невесомые штанги, из числа которых
штанги
,
состоят
из двух полуштанг, связанных призматическими
кинематическими парами. Штанги
,
присоединены
к платформе в точках
с
помощью сферических шарниров, а к
основанию в точках
-
с помощью карданных шарниров; штанга
связана
с основанием неподвижно, а с платформой
– с помощью сферического шарнира (рис.
6.2).
-
невесомые штанги, из числа которых
штанги
,
состоят
из двух полуштанг, связанных призматическими
кинематическими парами. Штанги
,
присоединены
к платформе в точках
с
помощью сферических шарниров, а к
основанию в точках
-
с помощью карданных шарниров; штанга
связана
с основанием неподвижно, а с платформой
– с помощью сферического шарнира (рис.
6.2).
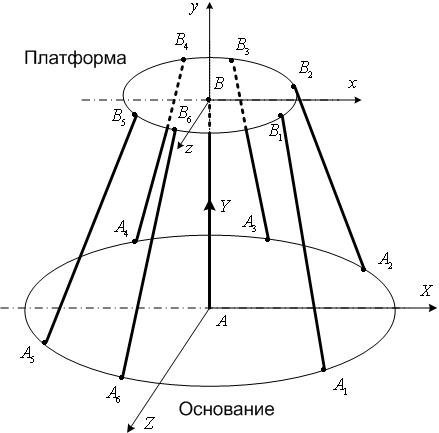
Рис. 6.2. Геометрия гексапода 4
Основание горизонтально и точки
расположены
на окружности радиуса
![]() с
центром в точке A в вершинах
квазирегулярного шестиугольника (рис.
6.3). Аналогично, точки
лежат на окружности радиуса
с
центром в точке A в вершинах
квазирегулярного шестиугольника (рис.
6.3). Аналогично, точки
лежат на окружности радиуса
![]() с
центром в точке B, в которой находится
центр масс платформы (рис. 6.4). Штанги
имеют
длины
,
и
наклонены к плоскости основания под
углами
,
(
).
Расстояние между точкой
с
центром в точке B, в которой находится
центр масс платформы (рис. 6.4). Штанги
имеют
длины
,
и
наклонены к плоскости основания под
углами
,
(
).
Расстояние между точкой
![]() и
основанием (плоскостью
)
обозначим
.
и
основанием (плоскостью
)
обозначим
.
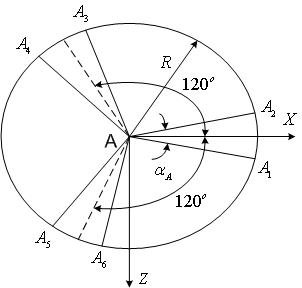
Рис. 6.3. Геометрия основания
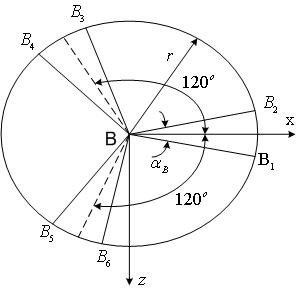
Рис. 6.4. Геометрия платформы
Заметим, что при проектировании
параллельных механизмов рассматриваемого
типа углы
![]() ,
,
![]() следует
выбирать из условия минимума или
максимума некоторого критерия
оптимальности, например, из условия
максимума объема рабочей области
манипулятора. В одной из работ рекомендуется
использовать
следует
выбирать из условия минимума или
максимума некоторого критерия
оптимальности, например, из условия
максимума объема рабочей области
манипулятора. В одной из работ рекомендуется
использовать
![]() ,
,
![]() [18].
[18].
Свяжем с основанием систему координат , а с платформой - систему координат так, как показано на рисунках 6.2 – 6.4.
Положение шарниров в системе координат определяется векторами
![]() ,
,
![]() .
(6.1)
.
(6.1)
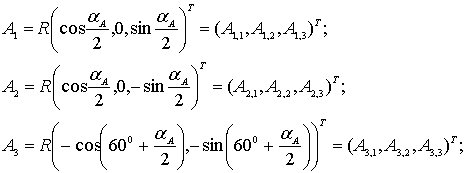
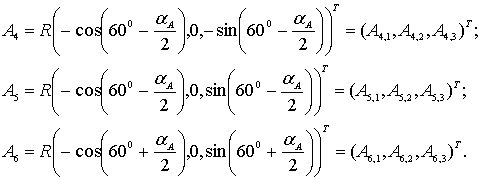
Если эти шарниры расположены так, как показано на рис. 6.3, то имеют место следующие выражения для компонентов этих векторов:
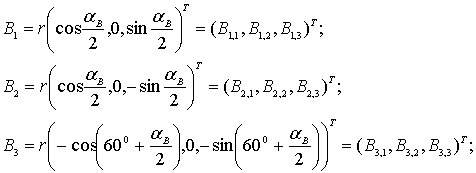
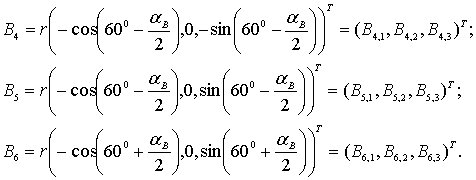
Аналогично, шарниры
![]() в
системе координат
имеют
координаты
в
системе координат
имеют
координаты
![]() ,
(6.2)
,
(6.2)
и если эти шарниры расположены на платформе так, как показано на рис. 6.4, то имеем следующие выражения для этих координат:
Положение платформы относительно
основания зададим углами Эйлера
![]() (рис.
6.5) и вектором
(рис.
6.5) и вектором
![]() .
.
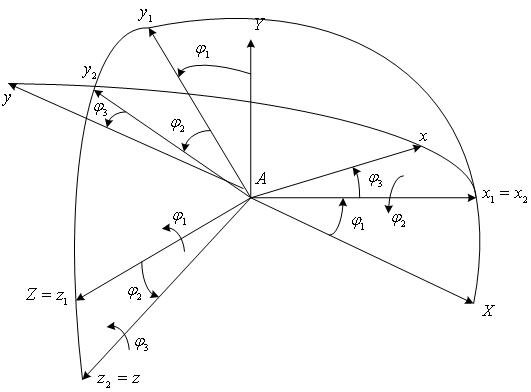
Рис. 6.5. К преобразованию систем координат
Таким образом, геометрические соотношения
между системами координат
,
можно
представить в виде (![]() )
матрицы однородных преобразований [12]
)
матрицы однородных преобразований [12]
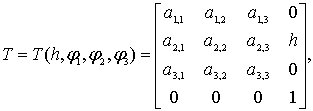 (6.3)
(6.3)
где компоненты матрицы выражаются через углы Эйлера следующим образом:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Из выражений (6.2), (6.3) следует, что положение шарнира , в системе координат определяется вектором
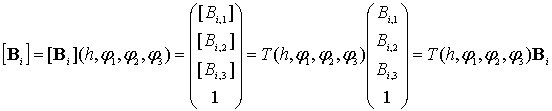 .
.
(6.4)
Из формул (6.1), (6.2), (6.4) вытекает, что
обобщенная координата
,
как функция расстояния
и
углов
![]() равна
равна
![]() ,
.
(6.5)
,
.
(6.5)
Здесь любые две из величин , следует трактовать, как избыточные обобщенные координаты.
Выражения для скоростей и ускорений
концов штанг
![]() (точек
)
можно найти, дифференцируя и дважды
дифференцируя по
(точек
)
можно найти, дифференцируя и дважды
дифференцируя по
![]() выражения
(6.5). Однако эти выражения оказываются
слишком громоздкими и мало пригодными
для практического использования.
Исследование скоростей и ускорений
концов штанг
проще
производить с помощью имитационного
моделирования (см. раздел 8).
выражения
(6.5). Однако эти выражения оказываются
слишком громоздкими и мало пригодными
для практического использования.
Исследование скоростей и ускорений
концов штанг
проще
производить с помощью имитационного
моделирования (см. раздел 8).
6.3. Динамика механизма. По методике подраздела 5.2 найдем уравнения движения платформы в форме уравнений Лагранжа
,
![]() ,
(6.6)
,
(6.6)
где
-
кинетическая энергия системы;
,
,
,![]() - обобщенные координаты;
-
обобщенная сила, соответствующая
-ой
обобщенной координате.
- обобщенные координаты;
-
обобщенная сила, соответствующая
-ой
обобщенной координате.
Положим, что платформа, как твердое
тело, симметрична относительно оси
,
так что ее моменты инерции
равны:
![]() (рис.
6.2).
(рис.
6.2).
Массу платформы обозначим . В таком случае ее кинетическая энергия равна
 ,
(6.7)
,
(6.7)
где
-
величина полной скорости центра масс
платформы
.
Поскольку в системе координат
вектор
скорости
![]() ,
эта величина определяется выражением
,
эта величина определяется выражением
![]() (рис.
6.2).
(рис.
6.2).
Выпишем силы, действующие на платформу,
а также радиусы-векторы
,
![]() ,
точек
их приложения в проекциях на оси системы
координат
(рис.
6.6):
,
точек
их приложения в проекциях на оси системы
координат
(рис.
6.6):
(6.8)
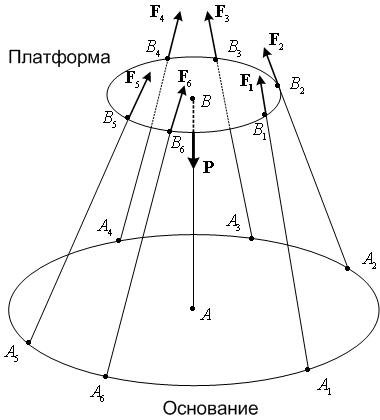
Рис. 6.6. Силы, действующие на платформу
Здесь
![]() .
.
Нам далее понадобятся матрицы Якоби
векторов
![]() ,
.
Из выражений (6.4) следует, что компоненты
матрицы
,
.
Из выражений (6.4) следует, что компоненты
матрицы
![]() определяются
следующими формулами:
определяются
следующими формулами:
![]() ;
;

![]()

![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Составим выражение для работы сил на элементарных приращениях и, в соответствии с методикой составления уравнений Лагранжа, приравняем его нулю:
![]() .
(6.9)
.
(6.9)
Здесь
,
![]() ,
-
,
-
элементарные приращения соответствующих векторов.
Из выражений для компонентов матриц
,
следует,
что элементы вектора
![]() определяются
следующим образом:
определяются
следующим образом:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
В приведенных выражениях для
![]() ,
,
,
,
![]() обозначим
обозначим
![]() коэффициент
при элементарном приращении
коэффициент
при элементарном приращении
![]() ,
,
![]() :
:
![]()
![]()
![]()
![]()
…
![]()
Во введенных обозначениях имеем
![]() ,
,
,
,
![]() ,
(6.10)
,
(6.10)
![]() (6.11)
(6.11)
Подставив выражения (6.10), (6.11) в выражение (6.9), после несложных преобразований получим уравнение
![]()
![]() +
+
![]() +
+![]() .
.
Приравнивание в последнем выражении
коэффициенты при элементарных приращениях
![]() дает
следующие значения обобщенных сил:
дает
следующие значения обобщенных сил:
![]() ;
;
![]() ;
;
![]() ;
;
![]()
Подставляя в уравнения (6.6) полученные выражения для обобщенных сил, а также выражение для кинетической энергии системы (6.7), получим искомую систему обыкновенных дифференциальных уравнений
![]()
![]() ,
(6.12)
,
(6.12)
![]()
![]() ,
(6.13)
,
(6.13)
![]()
![]() ,
(6.14)
,
(6.14)
![]()
![]() .
(6.15)
.
(6.15)
В уравнениях (6.12) - (6.15) силы
![]() представляют
собой внешние (управляющие) силы, которые
могут быть заданы как функции времени,
как функции обобщенных координат
,
а также как функции длин «своих» штанг
представляют
собой внешние (управляющие) силы, которые
могут быть заданы как функции времени,
как функции обобщенных координат
,
а также как функции длин «своих» штанг
![]() .
Наоборот, при заданных законах изменения
величин
из
этих уравнений могут быть найдены
необходимые управляющие силы, как
функции времени.
.
Наоборот, при заданных законах изменения
величин
из
этих уравнений могут быть найдены
необходимые управляющие силы, как
функции времени.