

5. Кинематика и динамика трипода 3
Обратная задача кинематики для данного трипода рассмотрена в п. 4.
5.1. Прямая задача кинематики. Пусть, как и в п. 4, невесомые штанги , состоят из двух полуштанг, связанных кинематическими парами типа P, присоединены к платформе в точках с помощью шарниров типа S, а к основанию в точках - с помощью U-шарниров; невесомая штанга , состоящая аналогично из двух полуштанг, связана с основанием неподвижно, а с платформой – с помощью U- шарнира (рис. 4.2).
Точки платформы образуют правильный треугольник со стороной и с центром в точке B, в которой находится центр масс платформы. Точки неподвижного горизонтального основания также образуют правильный треугольник со стороной a и с центром в точке A. Штанги имеют длины , и наклонены к плоскости основания под углами , ( ). Расстояние между точкой и основанием (плоскостью ) обозначим . Положим, как и ранее, , .
Свяжем с основанием систему координат
таким
образом, что начало координат A
совпадает с центром симметрии основания,
ось
проходит
через шарнир
![]() ,
ось
направлена
по нормали к основанию, а ось
образует
с осями
,
правую
тройку. Аналогично, свяжем с платформой
систему координат
(рис.
4.2).
,
ось
направлена
по нормали к основанию, а ось
образует
с осями
,
правую
тройку. Аналогично, свяжем с платформой
систему координат
(рис.
4.2).
Положение шарниров в системе координат определяется векторами (4.14), а положение шарниров в системе координат - векторами (4.15).
Положение платформы относительно
основания задается углами Эйлера
(рис.
4.4) и вектором
![]() .
Поэтому геометрические соотношения
между системами координат
,
можно
представить в виде (
)
матрицы однородных преобразований
.
Поэтому геометрические соотношения
между системами координат
,
можно
представить в виде (
)
матрицы однородных преобразований
![]() ,
аналогичной матрице (4.16).
,
аналогичной матрице (4.16).
Таким образом, положение шарнира
,
![]() в
системе координат
можно
задать вектором
в
системе координат
можно
задать вектором
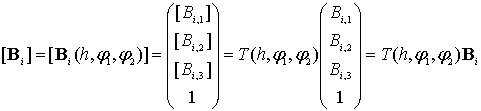 .
(5.1)
.
(5.1)
Итого, обобщенная координата , как функция расстояния и углов , определяется выражением, аналогичным выражению (4.17):
![]() ,
.
(5.2)
,
.
(5.2)
Выражения для скоростей и ускорений
концов штанг
легко
найти, дифференцируя и дважды дифференцируя
по
![]() выражения
(5.2). Однако, в силу громоздкости
получающихся выражений, исследование
скоростей и ускорений концов штанг
проще
производить с помощью имитационного
моделирования (см. п. 8).
выражения
(5.2). Однако, в силу громоздкости
получающихся выражений, исследование
скоростей и ускорений концов штанг
проще
производить с помощью имитационного
моделирования (см. п. 8).
5.2. Динамика механизма. По методике п. 4.5 найдем уравнения движения платформы в форме уравнений Лагранжа
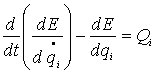 ,
,3,
(5.3)
,
,3,
(5.3)
где
-
кинетическая энергия системы;
![]() ,
,
![]() ,
,
![]() -
обобщенные координаты;
-
обобщенная сила, соответствующая
-ой
обобщенной координате.
-
обобщенные координаты;
-
обобщенная сила, соответствующая
-ой
обобщенной координате.
Положим, что платформа, как твердое тело, симметрична относительно оси , так что ее моменты инерции равны: (рис. 4.2). Массу платформы обозначим . В таком случае ее кинетическая энергия равна
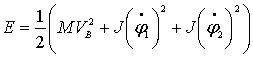 ,
(5.4)
,
(5.4)
где
![]() -
величина полной скорости центра масс
B платформы. Поскольку в системе
координат
вектор
скорости
-
величина полной скорости центра масс
B платформы. Поскольку в системе
координат
вектор
скорости
![]() ,
эта величина равна, очевидно,
,
эта величина равна, очевидно,
![]() (рис.
4.2).
(рис.
4.2).
Выпишем силы, действующие на платформу,
а также радиусы-векторы
![]() ,
,
точек
их приложения в проекциях на оси системы
координат
(рис.
4.5):
,
,
точек
их приложения в проекциях на оси системы
координат
(рис.
4.5):
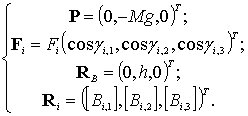 (5.5)
(5.5)
Здесь, аналогично п. 4.5,
![]() .
.
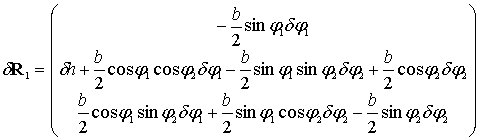
Нам далее понадобятся матрицы Якоби
![]() векторов
векторов
![]()
![]() ,
.
Из выражения (5.1) для вектора
,
.
Из выражения (5.1) для вектора
![]() следует,
что компоненты матрицы
следует,
что компоненты матрицы
![]() определяются
формулами
определяются
формулами
![]() ,
,
 ,
,
 ;
;
![]() ,
,
 ,
,
 ;
;
![]() ,
,
 ,
,
 .
.
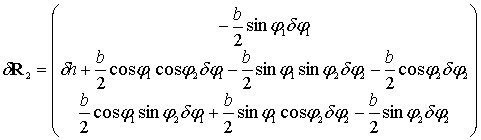
Аналогично, из выражения (5.1) для вектора
![]() следуют
выражения для компонентов матрицы
следуют
выражения для компонентов матрицы
![]() :
:
![]() ,
,
 ,
,
 ;
;
![]() ,
,
 ,
,
 ;
;
![]() ,
,
 ,
,
 .
.
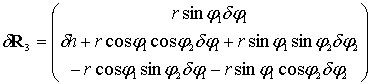
По такой же схеме из выражений (5.1) для
вектора
![]() вытекают
выражения для компонентов матрицы
вытекают
выражения для компонентов матрицы
![]() :
:
![]() ,
,
 ,
,
 ;
;
![]() ,
,
 ,
,
 ;
;
![]() ,
,
 ,
,
 .
.
Составим выражение для работы сил
![]() на
элементарных приращениях и, в соответствии
с методикой составления уравнений
Лагранжа, приравняем его нулю:
на
элементарных приращениях и, в соответствии
с методикой составления уравнений
Лагранжа, приравняем его нулю:
![]() .
(5.6)
.
(5.6)
Здесь величины
![]() ,
,
![]() ,
,
представляют собой векторы элементарных приращений.
Из выражений для компонентов матриц , следует, что
 ,
,
 ,
,
 .
.
Таким образом, учитывая (5.5), из (5.6) имеем
![]()
 +
+
 +
+
 =0.
(5.7)
=0.
(5.7)
Приравнивая в выражении (5.7) коэффициенты
при независимых приращениях
![]() ,
получим следующие значения обобщенных
сил:
,
получим следующие значения обобщенных
сил:
![]() ;
(5.8)
;
(5.8)
(5.9)
(5.10)
Подставляя выражения (5.8) – (5.10) в формулы (5.3), (5.4), получим искомую систему обыкновенных дифференциальных уравнений:
![]() (5.11)
(5.11)
(5.12)

(5.13)
В уравнениях (5.11) – (5.13) силы
![]() -
это внешние (управляющие) силы, которые
могут быть заданы как функции времени,
как функции обобщенных координат
,
а также как функции длин «своих» штанг
-
это внешние (управляющие) силы, которые
могут быть заданы как функции времени,
как функции обобщенных координат
,
а также как функции длин «своих» штанг
![]() .
Наоборот, при заданных законах изменения
величин
из
этих уравнений могут быть найдены
необходимые управляющие силы, как
функции времени.
.
Наоборот, при заданных законах изменения
величин
из
этих уравнений могут быть найдены
необходимые управляющие силы, как
функции времени.