

4. Кинематика и динамика трипода 2
4.1. Обратная задача кинематики. Использование механизмов параллельной кинематики приводит к усложнению задач управления манипуляторами на основе этих механизмов. Однако некоторые задачи кинематики, например, обратная кинематическая задача, и для таких механизмов решаются просто.
Пусть обобщенными координатами
![]() являются
длины штанг механизма
являются
длины штанг механизма
![]() ,
,
![]() ,
,
![]() соответственно
(рис. 4.1). Пусть также в неподвижной
декартовой системе координат
соответственно
(рис. 4.1). Пусть также в неподвижной
декартовой системе координат
![]() координаты
точек
координаты
точек
![]() равны
равны
![]() ,
а точек
-
,
а точек
-
![]() ,
где
,
где
![]() ,
,
![]() .
.
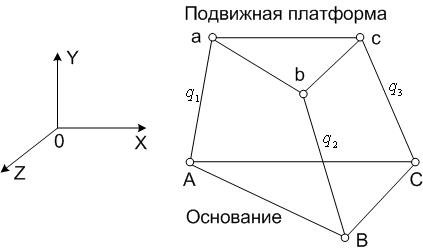
Рис. 4.1. Схема трипода:
![]() -
обобщенные координаты
-
обобщенные координаты
Легко видеть, что во введенных обозначениях решение обратной задачи кинематики для любого трипода дает следующая система уравнений:
![]() ;
;
![]() ;
;
![]() .
.
4.2. Кинематика плоскопараллельного
движения. Пусть невесомые стержни
![]()
![]() ,
,
![]() ,
состоящие из двух полуштанг, связанных
поступательными кинематическими парами,
присоединены к платформе в точках
,
состоящие из двух полуштанг, связанных
поступательными кинематическими парами,
присоединены к платформе в точках
![]() с
помощью сферических шарниров, а к
основанию в точках
с
помощью сферических шарниров, а к
основанию в точках
![]() с
помощью карданных шарниров. Пусть также
штанга
с
помощью карданных шарниров. Пусть также
штанга
![]() присоединена
к платформе в точке
присоединена
к платформе в точке
![]() с
помощью карданного шарнира, а к основанию
в точке
с
помощью карданного шарнира, а к основанию
в точке
![]() -
неподвижно (рис. 4.2).
-
неподвижно (рис. 4.2).
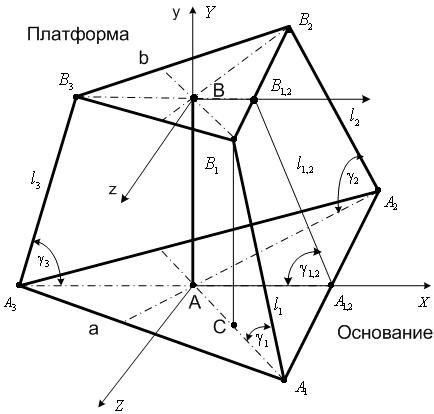
Рис. 4.2. Геометрия трипода 2
Точки
образуют
правильный треугольник со стороной
![]() и
с центром в точке B, в которой находится
центр масс платформы. Будем считать,
что неподвижное основание горизонтально
и точки
также
образуют правильный треугольник со
стороной a и с центром в точке A.
Штанги
и
с центром в точке B, в которой находится
центр масс платформы. Будем считать,
что неподвижное основание горизонтально
и точки
также
образуют правильный треугольник со
стороной a и с центром в точке A.
Штанги
![]() имеют
длины
имеют
длины
![]() ,
,
![]() и
наклонены к плоскости основания под
углами
и
наклонены к плоскости основания под
углами
![]() ,
(
,
(![]() ).
Опорная штанга
имеет
длину
).
Опорная штанга
имеет
длину
![]() ,
,
![]() и
перпендикулярна основанию.
и
перпендикулярна основанию.
Далее нам понадобятся также следующие
обозначения:
![]() ,
,
![]() -
середины отрезков
-
середины отрезков
![]() ,
,
![]() соответственно;
соответственно;
![]() -
длина отрезка
-
длина отрезка
![]() ;
;
![]() -
угол между прямой
и
плоскостью основания (рис. 4.2).
-
угол между прямой
и
плоскостью основания (рис. 4.2).
Введём систему координат
![]() с
центром в точке A, ось
с
центром в точке A, ось
![]() которой
направлена по вектору
которой
направлена по вектору
![]() ,
ось
,
ось
![]() -
вертикально вверх (от основания к
платформе), а ось
-
вертикально вверх (от основания к
платформе), а ось
![]() дополняет
систему до правой тройки (рис. 4.2).
дополняет
систему до правой тройки (рис. 4.2).
Вслед за работой [14] рассмотрим
плоскопараллельные движения платформы,
когда длины двух штанг (пусть это будут
штанги
![]() )
и углы их наклона к основанию
)
и углы их наклона к основанию
![]() равны:
равны:
![]() ;
;
![]() .
(4.1)
.
(4.1)
Если перемещение платформы производится
с соблюдением условия (4.1), то, очевидно,
точка
![]() перемещается
в вертикальной плоскости
перемещается
в вертикальной плоскости
![]() .
Платформа при этом имеет всего одну
степень свободы (вращательную) и ее
положение полностью определяется
переменной
.
Платформа при этом имеет всего одну
степень свободы (вращательную) и ее
положение полностью определяется
переменной
![]() -
углом наклона платформы к основанию
(рис. 4.3).
-
углом наклона платформы к основанию
(рис. 4.3).
Определим переменную
,
как функцию обобщенных координат
![]() ,
,
![]() .
Из простых геометрических соотношений
имеем
.
Из простых геометрических соотношений
имеем
![]() ,
,
![]() ,
,
 ,
(4.2)
,
(4.2)
где
 ,
,
 .
.
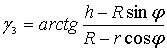
Рис. 4.3. Схема трипода 2 в плоскости
симметрии
![]()
Из выражения (4.2) легко получить искомую функцию
![]() .
(4.3)
.
(4.3)
Аналогично для имеем (рис. 4.3)
![]() ,
,
![]() ,
,
![]() ,
,
 .
(4.4)
.
(4.4)
Таким образом, для
![]() искомая
функция аналогична функции (4.3) и имеет
вид
искомая
функция аналогична функции (4.3) и имеет
вид
![]() .
(4.5)
.
(4.5)
Итак, поведение платформы в плоскопараллельном
движении описывается всего одной
обобщенной координатой
![]() или
;
величины
,
определяемые формулой (4.5), следует
трактовать, как избыточные обобщенные
координаты.
или
;
величины
,
определяемые формулой (4.5), следует
трактовать, как избыточные обобщенные
координаты.
Скорости и ускорения концов штанг
![]() (точек
(точек
![]() )
легко найти, дифференцируя и дважды
дифференцируя по
выражения
(4.3), (4.5) соответственно. Так, например,
)
легко найти, дифференцируя и дважды
дифференцируя по
выражения
(4.3), (4.5) соответственно. Так, например,
 .
.
4.3. Динамика плоскопараллельного движения. Уравнение движения платформы будет искать в форме уравнения Лагранжа
 ,
(4.6)
,
(4.6)
где
![]() -
кинетическая энергия системы,
-
кинетическая энергия системы,
![]() -
обобщенная сила.
-
обобщенная сила.
Поскольку поступательные движения платформы отсутствуют, ее кинетическая энергия равна
 ,
(4.7)
,
(4.7)
где
![]() -
момент инерции платформы относительно
оси, параллельной оси
-
момент инерции платформы относительно
оси, параллельной оси
![]() и
проходящей через точку
.
и
проходящей через точку
.
Выпишем силы, действующие на платформу,
а также радиус-векторы
![]() точек
их приложения в проекциях на оси системы
координат
:
точек
их приложения в проекциях на оси системы
координат
:
 (4.8)
(4.8)
 (4.9)
(4.9)
Здесь
![]() -
масса платформы,
-
масса платформы,
![]() -
ускорение свободного падения.
-
ускорение свободного падения.
Из уравнений (4.8), (4.9) вытекает, что обобщенная сила определяется выражением
 (4.10)
(4.10)
где углы
![]() выражаются
через обобщенную координату
с
помощью формул (4.2), (4.4).
выражаются
через обобщенную координату
с
помощью формул (4.2), (4.4).
Подставляя выражения (4.7), (4.10) в уравнение (4.6), получим искомое обыкновенное дифференциальное уравнение второго порядка
![]() (4.11)
(4.11)
где углы
![]() ,
,
![]() ,
как функции угла
,
определяются формулами
,
как функции угла
,
определяются формулами
 ,
,
 .
(4.12)
.
(4.12)
 ,
,
 .
(4.13)
.
(4.13)
Заметим, что в уравнении (4.11) силы
![]() ,
,
![]() -
это внешние (управляющие) силы, которые
могут быть заданы как функции времени,
как функции обобщенной координаты
,
а также как функции длин «своих» штанг
,
-
это внешние (управляющие) силы, которые
могут быть заданы как функции времени,
как функции обобщенной координаты
,
а также как функции длин «своих» штанг
,
![]() .
Наоборот, при заданном законе изменения
из
(4.11) могут быть найдены необходимые
управляющие силы, как функции времени.
.
Наоборот, при заданном законе изменения
из
(4.11) могут быть найдены необходимые
управляющие силы, как функции времени.
Из уравнения (4.11) легко получить
взаимосвязь между стационарными
значениями сил
,
,
т.е. значениями которые обеспечивают
равновесие платформы при заданной
обобщенной координате
.
Действительно, если
![]() ,
то из (4.11) имеем уравнение
,
то из (4.11) имеем уравнение

из которого следует, что
 .
.
Здесь
![]() ,
,
![]() ,
,
![]() ,
,
![]() определяются
выражениями (4.12), (4.13) соответственно.
определяются
выражениями (4.12), (4.13) соответственно.
4.4. Кинематика произвольного движения.
Используем системы координат
,
![]() (рис.
4.2). При этом положение шарниров
(рис.
4.2). При этом положение шарниров
![]() в
системе координат
определяется
векторами
в
системе координат
определяется
векторами
 (4.14)
(4.14)
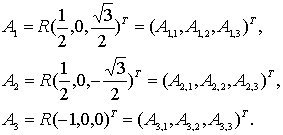
Аналогично, положение шарниров в системе координат задается векторами
 (4.15)
(4.15)
Положение платформы относительно
основания зададим углами Эйлера
![]() (рис.
4.4).
(рис.
4.4).
Тогда геометрические соотношения между
системами координат
,
можно
представить в виде (![]() )
матрицы однородных преобразований [12]
)
матрицы однородных преобразований [12]
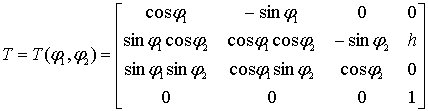 .
(4.16)
.
(4.16)
Рис. 4.4. К преобразованию систем координат
Таким образом, положение шарнира в системе координат задается вектором
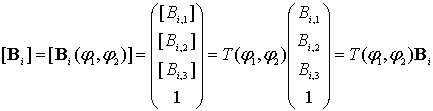 .
.
Отсюда следует, что обобщенная координата
,
как функция углов
![]() определяется
выражением
определяется
выражением
![]() ,
(4.17)
,
(4.17)
где одну из величин следует трактовать, как избыточную обобщенную координату.
Выражения для скоростей концов штанг
(точек
)
легко найти из Якобина системы (4.17), т.е.
дифференцируя по
![]() эту
систему. Аналогично, ускорения концов
штанг
можно
получить из матрицы вторых производных
системы (4.17). Однако, как выражения для
скоростей, так и выражения для ускорений
оказываются слишком громоздкими и мало
пригодными для практического использования.
Исследование скоростей и ускорений
концов штанг
проще
производить с помощью имитационного
моделирования, например, с использованием
программной системы MatLab [13] (см. п. 8).
эту
систему. Аналогично, ускорения концов
штанг
можно
получить из матрицы вторых производных
системы (4.17). Однако, как выражения для
скоростей, так и выражения для ускорений
оказываются слишком громоздкими и мало
пригодными для практического использования.
Исследование скоростей и ускорений
концов штанг
проще
производить с помощью имитационного
моделирования, например, с использованием
программной системы MatLab [13] (см. п. 8).
4.5. Динамика произвольного движения.
Примем обозначения и допущения, сделанные
в п. 4.2. Расстояние между точкой
и
основанием (плоскостью
![]() )
обозначим
.
Введем также следующие обозначения:
;
(рис.
4.2).
)
обозначим
.
Введем также следующие обозначения:
;
(рис.
4.2).
Поскольку поступательные движения платформы отсутствуют, уравнения движения платформы будем искать в форме уравнений Лагранжа
 ,
,
![]() (4.18)
(4.18)
где
-
кинетическая энергия системы;
![]() -
обобщенная сила, соответствующая
-ой
обобщенной координате.
-
обобщенная сила, соответствующая
-ой
обобщенной координате.
Положим, что платформа, как твердое
тело, симметрична относительно оси
![]() (рис.
4.2), так что ее моменты инерции
(рис.
4.2), так что ее моменты инерции
![]() равны:
равны:
![]() .
В таком случае кинетическая энергия
платформы определяется выражением
.
В таком случае кинетическая энергия
платформы определяется выражением
 .
(4.19)
.
(4.19)
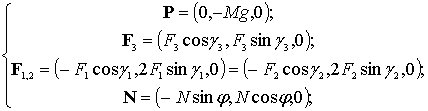
Положим, что поступательная кинематическая
пара, связанная со штангой
![]() является
пассивной. Выпишем силы, действующие
на платформу, а также радиусы-векторы
,
является
пассивной. Выпишем силы, действующие
на платформу, а также радиусы-векторы
,
![]() точек
их приложения в проекциях на оси системы
координат
(рис.
4.5):
точек
их приложения в проекциях на оси системы
координат
(рис.
4.5):
![]() ;
;
![]() ;
;
![]() .
.
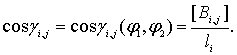
Здесь
![]() -
косинус угла между штангой
и
единичным вектором
-
косинус угла между штангой
и
единичным вектором
![]() -ой
оси системы координат
(
-ой
оси системы координат
(![]() соответствует ось
,
соответствует ось
,
![]() -
ось
,
-
ось
,
![]() -
ось
-
ось
![]() ).
).
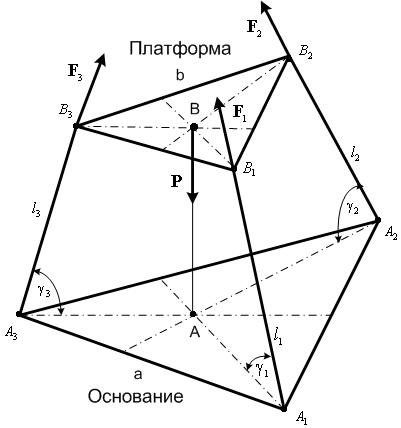
Рис. 4.5. Силы, действующие на платформу
Из определения скалярного произведения
векторов легко получить явные выражения
для косинуса угла
![]() ,
,
![]() ,
,
![]() :
:
Таким образом, выражения для обобщенных
сил
![]() имеют
вид
имеют
вид
 =
=![]()
(4.20)
 =
=![]() ,
(4.21)
,
(4.21)
где
![]() -
элементарные приращения.
-
элементарные приращения.
Подставляя выражения (4.19) - (4.21) в уравнение (4.18), получим искомую систему обыкновенных дифференциальных уравнений второго порядка
 (4.22)
(4.22)
Здесь силы
![]() ,
-
это внешние силы, которые могут быть
заданы как функции времени, как функции
обобщенной координаты
,
а также как функции длин «своих» штанг
,
.
Наоборот, при заданном законе изменения
из
уравнения (4.22) могут быть найдены
необходимые управляющие силы, как
функции времени.
,
-
это внешние силы, которые могут быть
заданы как функции времени, как функции
обобщенной координаты
,
а также как функции длин «своих» штанг
,
.
Наоборот, при заданном законе изменения
из
уравнения (4.22) могут быть найдены
необходимые управляющие силы, как
функции времени.