

3. Кинематические схемы секций манипулятора
Вообще говоря, хобот слона способен выполнять следующие движения: растяжение/сжатие; изгиб в любой из плоскостей; поворот вокруг свой оси. В зависимости от целевого назначения робота-манипулятора может быть необходимым воспроизведение не всех этих движений. Поэтому будем рассматривать следующую иерархию возможностей манипулятора:
изгиб манипулятора в любой из плоскостей;
изгиб манипулятора в любой из плоскостей; растяжение/сжатие;
изгиб манипулятора в любой из плоскостей; растяжения/сжатия; поворот вокруг своей продольной оси;
изгиб манипулятора в любой из плоскостей; растяжения/сжатия; поворот вокруг своей продольной оси; плоско-параллельное перемещение.
Для построения манипуляторов первого типа достаточно, чтобы последующая секция манипулятора обладала двумя вращательными степенями свободы относительно двух осей, перпендикулярных продольной оси предыдущей секции манипулятора.
В манипуляторе второго типа к указанным двум степеням свободы для каждой секции добавляется одна поступательная степень свободы – растяжение и сжатие секции манипулятора относительно его продольной оси симметрии.
В манипуляторе третьего типа по сравнению с манипулятором второго типа добавляется еще одна вращательная степень свободы – вращение секции манипулятора вокруг его продольной оси симметрии.
Каждая из секций манипулятора четвертого типа обладает всеми шестью степенями свободы – к возможным перемещениям секции манипулятора третьего типа добавляется два поступательных перемещения.
Отдельного рассмотрения заслуживает последняя секция манипулятора (на которой устанавливаются рабочие органы манипулятора). Целесообразно исходить из необходимости обеспечения для этих органов пяти-шести степеней свободы.
3.1. Параллельный механизм с двумя
степенями свободы. Манипуляторы
первого типа будем строить на основе
механизма параллельной кинематики типа
трипода
![]() ,
который состоит из неподвижного
основания, подвижной платформы, трех
штанг, каждая из которых состоит из двух
полуштанг и активной поступательной
кинематической пары (привода), а также
из центральной неподвижной штанги –
рис. 3.1. Будем далее называть этот механизм
«трипод 2».
,
который состоит из неподвижного
основания, подвижной платформы, трех
штанг, каждая из которых состоит из двух
полуштанг и активной поступательной
кинематической пары (привода), а также
из центральной неподвижной штанги –
рис. 3.1. Будем далее называть этот механизм
«трипод 2».
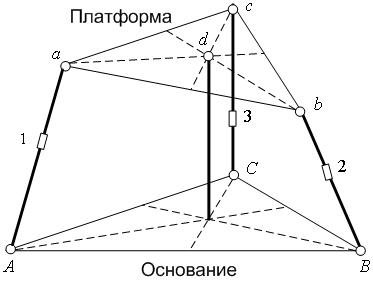
Рис. 3.1. Схема трипода 2:
![]() -
сферические шарниры;
-
сферические шарниры;
![]() -
карданные шарниры; 1,2,3 – поступательные
кинематические пары
-
карданные шарниры; 1,2,3 – поступательные
кинематические пары
Для оценки числа степеней свободы
![]() платформы
используем формулы Сомова-Малышева и
Грюблера.
платформы
используем формулы Сомова-Малышева и
Грюблера.
Пл формуле (2.1) для трипода 2 имеем:
![]() ;
;
![]() (поступательные
кинематические пары);
(поступательные
кинематические пары);
![]() (карданные
шарниры);
(сферические
шарниры). Таким образом, из формулы
Сомова-Малышева (2.1) следует, что
(карданные
шарниры);
(сферические
шарниры). Таким образом, из формулы
Сомова-Малышева (2.1) следует, что
![]() ,
,
т.е. рассматриваемый механизм действительно имеет две степени свободы (вращательных).
Аналогично, по формуле (2.3) для того же
параллельного механизма имеем:
![]() ;
;
![]() ;
;
![]() (сферические
шарниры);
(сферические
шарниры);
![]() (карданные
шарниры);
(карданные
шарниры);
![]() (поступательные
кинематические пары). Итого, из формулу
Грюблера получаем то же количество
степеней своюоды
(поступательные
кинематические пары). Итого, из формулу
Грюблера получаем то же количество
степеней своюоды
![]() 2.
2.
3.2. Параллельный механизм с тремя степенями свободы. Для построения манипуляторов второго типа также используем механизм параллельной кинематики на основе трипода , который состоит из неподвижного основания, подвижной платформы и четырех штанг, каждая из которых состоит из двух полуштанг и активной поступательной кинематической пары (привода) – рис. 3.2. Будем далее этот механизм называть «трипод 3».
Для трипода 3 из формулы (2.1) следует, что
![]() ,
,
![]() (поступательные
кинематические пары),
(карданные
шарниры),
(поступательные
кинематические пары),
(карданные
шарниры),
![]() (сферические
шарниры) и
(сферические
шарниры) и
![]() .
.
Таким образом, трипод 3, как и следовало ожидать, имеет три степени свободы (две вращательные и одну поступательную).
Аналогично, по формуле (2.3) имеем:
![]() ;
;
![]() ;
;
![]() (поступательные
кинематические пары);
(поступательные
кинематические пары);
![]() (карданные
шарниры);
(карданные
шарниры);
![]() (сферические
шарниры). Так что, как и по формуле (2.1),
получаем три степени свободы
рассматриваемого механизма:
(сферические
шарниры). Так что, как и по формуле (2.1),
получаем три степени свободы
рассматриваемого механизма:
![]() .
.
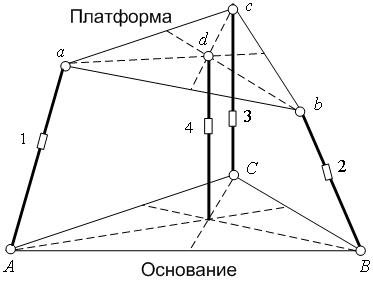
Рис. 3.2. Схема трипода 3: - карданные шарниры; - сферические шарниры; 1,2,3, 4 – поступательные кинематические пары
3.3. Параллельный механизм с четырьмя степенями свободы. В качестве звеньев манипуляторов третьего типа будем рассматривать механизм параллельной кинематики на основе гексапода . Механизм состоит из неподвижного основания, подвижной платформы, шести штанг, каждая из которых состоит из двух полуштанг и активной поступательной кинематической пары (привода), а также седьмой центральной штанги, неподвижно связанной с основанием, а с помощью сферического шарнира – с платформой (рис. 3.3). Будем далее для краткости изложения называть данный механизм «гексапод 4».
Из формулы (2.1) следует, что для данного
механизма
![]() ,
,
![]() (поступательные
кинематические пары),
(поступательные
кинематические пары),
![]() (карданные
шарниры),
(карданные
шарниры),
![]() (сферические
шарниры). Итого,
(сферические
шарниры). Итого,
![]() .
.
Т.е. рассматриваемый механизм действительно имеет 4 степени свободы (три вращательных и одну поступательную)
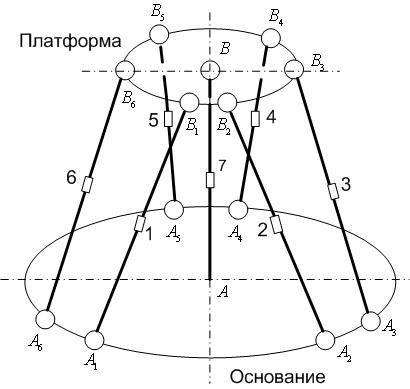
Рис. 3.3. Схема гексапода 4:
![]() -
сферические шарниры;
-
сферические шарниры;
![]() -
карданные шарниры; 1 - 7 – поступательные
кинематические пары
-
карданные шарниры; 1 - 7 – поступательные
кинематические пары
Аналогично по формуле (2.3) имеем:
![]() ;
;
![]() ;
;
![]() (поступательные
кинематические пары);
(поступательные
кинематические пары);
![]() (карданные
шарниры);
(карданные
шарниры);
![]() (сферические
шарниры). Таким образом, как и по формуле
(2.1),
(сферические
шарниры). Таким образом, как и по формуле
(2.1),
![]() .
.
3.4. Гексапод с шестью степенями свободы. В качестве звеньев манипуляторов четвертого типа будем рассматривать механизм параллельной кинематики типа «гексапод» , который состоит из неподвижного основания, подвижной платформы и шести штанг, каждая из которых состоит из двух полуштанг и активной поступательной кинематической пары (привода) – рис. 3.4. Для единообразия будем далее этот механизм называть «гексапод 6».
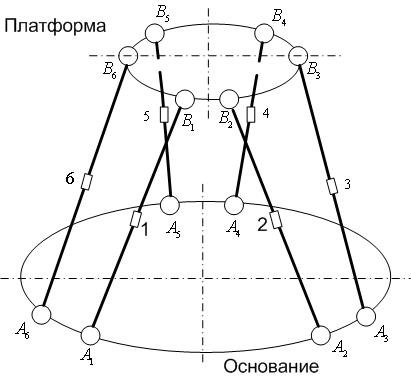
Рис. 3.4. Схема гексапода 6:
![]() -
сферические шарниры;
-
карданные шарниры; 1,2,…,6 – поступательные
кинематические пары
-
сферические шарниры;
-
карданные шарниры; 1,2,…,6 – поступательные
кинематические пары
Из формулы (2.1) следует, что в данном
случае
![]() ,
,
![]() (поступательные
кинематические пары),
(карданные
шарниры),
(поступательные
кинематические пары),
(карданные
шарниры),
![]() (сферические
шарниры). Итого,
(сферические
шарниры). Итого,
![]() ,
,
т.е. рассматриваемый механизм, как и ожидалось, имеет 6 степеней свободы (3 вращательных и 3 поступательных).
Аналогично, для формулы (2.3) имеем:
![]() ;
;
![]() ;
;
![]() (поступательные
кинематические пары);
(поступательные
кинематические пары);
![]() (карданные
шарниры);
(карданные
шарниры);
![]() (сферические
шарниры). Таким образом имеем то же число
степеней свободы
(сферические
шарниры). Таким образом имеем то же число
степеней свободы
![]() .
.
3.5. Параллельные механизмы типов
![]() ,
,
![]() .
Наряду с рассмотренными параллельными
механизмами, построенными на основе
механизмов типа
.
Наряду с рассмотренными параллельными
механизмами, построенными на основе
механизмов типа
![]() ,
для построения секций робота-манипулятора
могут быть использованы механизмы типов
,
.
,
для построения секций робота-манипулятора
могут быть использованы механизмы типов
,
.
Кинематическая цепь механизма первого типа имеет вид, представленный на рис. 3.5.
Часто в таких механизмах U-соединения
заменяют на S-соединение. Это приводит
к избыточным степеням свободы в каждой
связи, однако, не изменяет свойств
параллельного
механизма. Точно так же U-и S-соединения
каждой штанги можно взаимозаменять без
изменения характеристик механизма.
Поэтому обычно не делают различий между
механизмами типов
![]() ,
,
![]() или
или
![]() ,
и все их обозначают как
.
,
и все их обозначают как
.
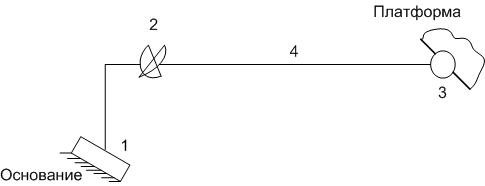
Рис. 3.5. Кинематическая цепь механизма типа : 1- вращательный шарнир; 2 – карданный шарнир; 3 – сферический шарнир; 4 – штанга
Главное преимущество параллельных механизмов состоит в возможности использовать более легкую платформу, поскольку тяжелые двигатели в этом случае располагаются на основании. Важно также, что в механизмах можно использовать двигатели приводов меньшей стоимости. Кроме того, такие механизмы позволяют использовать достаточно тонкие стержни в качестве штанг.
Легко видеть, что применительно к роботу-манипулятору типа «хобот» из числа указанных преимуществ механизмов существенной является только меньшая возможная стоимость двигателей приводов.
Кинематическая цепь механизма типа представлена на рис. 3.6.
Как и в манипуляторах типа , в манипуляторах приводы закрепляются на основании, а в качестве штанг могут использоваться стержни постоянной длины и относительно небольшого диаметра. По сравнению с платформой Гафа-Стюарта масса подвижных частей данного механизма значительно меньше. Кроме того, в механизмах типа меньше вероятность столкновения звеньев.
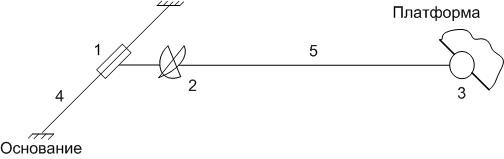
Рис. 3.6. Кинематическая цепь механизма типа : 1- призматическое соединение; 2 – карданный шарнир; 3 – сферический шарнир;
4 – направляющая; 5 - штанга
Манипуляторы типа , в отличие от манипуляторов типа , используют линейные приводы, благодаря чему эти манипуляторы отличаются более высокими статическими (механическая жесткость) и динамическими (развиваемые скорости и ускорения) характеристиками. Манипуляторы типа часто называют HexaSlide-манипуляторами.