

Лабораторная работа №2
Оптимизация регулятора системы телеуправления при стационарных случайных воздействиях
ЦЕЛЬ И ЗАДАЧИ РАБОТЫ
Цель исследования – практическое освоение методов оптимального синтеза линейной СТУ при стационарных случайных воздействиях.
Достижение поставленной цели связано с решением следующих задач:
- постановка задачи оптимизации;
- выбор структуры регулятора и корректируемых параметров;
- численная оптимизация параметров регулятора по критерию минимума дисперсии ошибки;
- моделирование скорректированной системы при случайных воздействиях с оценкой точности в среднем;
- анализ устойчивости системы;
- анализ качества регулирования в переходном режиме.
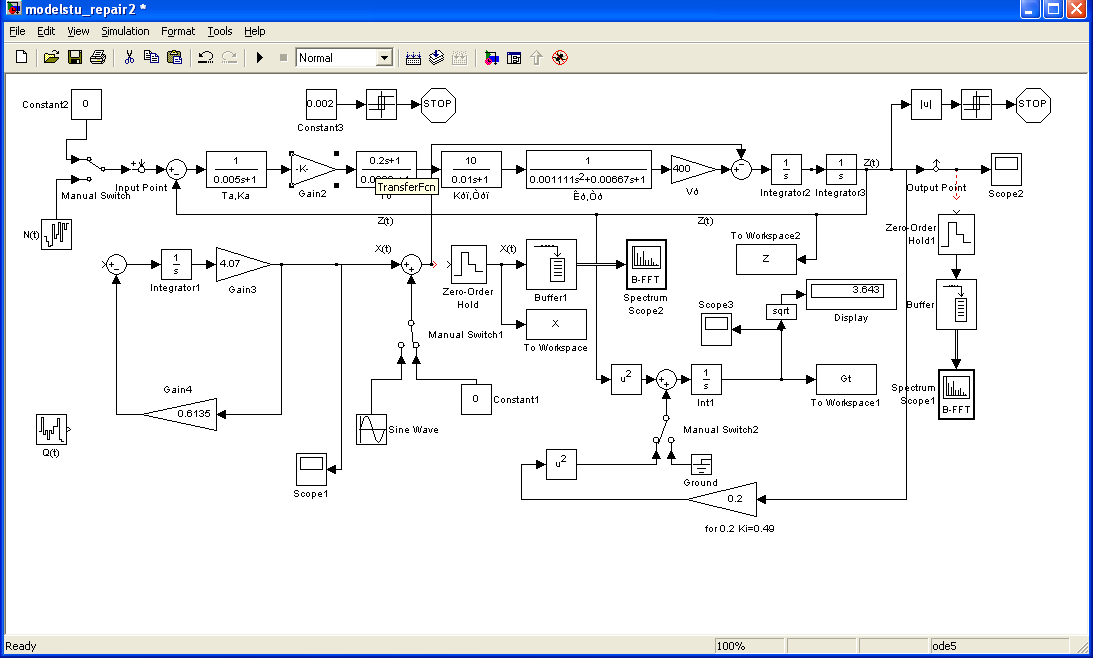
Мы подавали на вход 0,002 и получили средне квадратичное отклонение 3.645.
Проведя оптимизацию мы получили среднее квадратичное отклонение равное 1,822.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1 Какой критерий используется для оценки точности стохастической системы в установившемся режиме?
2 Какую структуру имеет регулятор и какие параметры корректируются?
3 В чем состоит математическая постановка задачи оптимизации СТУ? Какие ограничения должны учитываться?
4 Какие численные методы и стандартные процедуры используются для минимизации?
5 Что такое условная оптимизация СТУ по среднеквадратичному критерию? В чём суть метода штрафных функций? Как он реализуется с помощью Simulink- схемы?
6 Как влияет значение
параметра
![]() на дисперсию ошибки?
на дисперсию ошибки?
7 Какие показатели динамики должны контролироваться при синтезе?
8 Влияет ли выбор начального приближения на результат оптимизации?
9 Как влияет интенсивность шумовой помехи на результаты оптимизации?
Ответы на вопросы:
1 Критерий точности
СТУ

2 В качестве
оптимизируемых параметров используются
коэффициент передачи системы по
разомкнутому контуру, постоянная времени
![]() и разнос n
дифференцирующего
фильтра.
и разнос n
дифференцирующего
фильтра.![]() ,где
,где
![]() – вектор корректируемых параметров
регулятора,
– вектор корректируемых параметров
регулятора,
![]() ;
;
![]() – оптимальное значение вектора. В
качестве корректируемого параметра
рассмотрим коэффициент передачи Ki
разомкнутой системы.
– оптимальное значение вектора. В
качестве корректируемого параметра
рассмотрим коэффициент передачи Ki
разомкнутой системы.
3 Следует
задать такое начальное приближение
коэффициента, при котором система
устойчива. Расчет
Ki
в
диапазоне
значений, где система устойчива,
сводится к
решению задачи однопараметрической
минимизации
![]() , где
Ki*
– оптимальное значение коэффициента.
, где
Ki*
– оптимальное значение коэффициента.
4 Оптимизация СТУ по одному параметру может производиться с помощью стандартной функции Fminbnd пакета Optimization Toolbox. Эта функция предназначена для скалярной нелинейной минимизации с ограничениями вида x1< x< x2. Алгоритм основан на методе золотого сечения и квадратичной (параболической) интерполяции. Функция оптимизации записывается в виде:
Ki = fminbnd(@cget,a,b),
где cget – целевая функция; a и b – границы интервала изменений Ki, который соответствует устойчивой системе.
5 В общем случае
задачу оптимизации САУ по критерию
минимума среднего значения квадрата
ошибки следует ставить как условную,
а именно, как задачу оптимизации в
условиях ограничений типа неравенств.
Последние представляют собой функциональные
и параметрические ограничения, которые
обусловлены требованиями к показателям
устойчивости, колебательности и
быстродействия системы, а также
требованиями к физической реализуемости
параметров регулятора.
Метод штрафных
функций. В соответствии с этим методом,
если в процессе работы алгоритма
минимизации будет превышено некоторое
граничное значение коэффициента передачи
,
то к исходной целевой функции
![]() прибавляется большая константа.
Изображающая точка алгоритма минимизации
как бы отскакивает от высоких стен,
окружающих ту часть пространства
параметров регулятора (в данном случае
часть числовой прямой, где
прибавляется большая константа.
Изображающая точка алгоритма минимизации
как бы отскакивает от высоких стен,
окружающих ту часть пространства
параметров регулятора (в данном случае
часть числовой прямой, где
![]() ),
в которой выполняются функциональные
ограничения, в частности, ограничения
по запасам устойчивости, показателям
колебательности и быстродействия
системы.
),
в которой выполняются функциональные
ограничения, в частности, ограничения
по запасам устойчивости, показателям
колебательности и быстродействия
системы.
6 При решении задач условной оптимизации часто используется метод штрафных функций. В соответствии с этим методом, если в процессе работы алгоритма минимизации будет превышено некоторое граничное значение коэффициента передачи , то к исходной целевой функции прибавляется большая константа.
7 Точность, устойчивость, колебательность и быстродействие системы.
8 Для исключения локальных минимумов и для улучшения сходимости алгоритма к глобальному минимуму вводят сетку начальных приближений в пространстве корректируемых параметров. Запуски алгоритма минимизации производятся из узлов этой сетки.
9 Чем интенсивней шумовая помеха, тем дольше будет проводится оптимизация или можно вообще не получить приемлемого решения.