

Совершенствование метода расчета. Лобовые реакции.
Предлагаемый метод расчета многошарнирного оперения с учетом отклонения руля [2] по существу представляет собой метод сравнения перемещений [8], в котором приходится увязывать перемещения руля и стабилизатора не только в вертикальной, но и в горизонтальной плоскости.
Рассматривается
оперение, руль которого навешен на (п+2)
шарнирах (рис. 1.1.2), где n
= 1, 2, 3, ..., и отклонен на угол
![]() .
.
Оперение может иметь переменную по длине жесткость и произвольную внешнюю нагрузку. Решение заключается в определении реакций и в шарнирах навески и строится в следующих предположениях:
1) руль и стабилизатор жестки на кручение;
2) лобовая изгибная жесткость стабилизатора велика;
3) кронштейны навески руля жестки в направлении и и податливы (все, кроме одного) в направлении оси z .
Для решения этой статически неопределимой задачи выбираем основную систему: руль предполагается навешенным только на крайние шарниры. При таком креплении точки i' руля и i стабилизатора под воздействием внешней нагрузки разойдутся (на рис. 1.1.2,б изображена i-я точка).

Рис. 1.1.2
Для
выполнения условий их совместности
необходимо в каждом шарнире к рулю и
стабилизатору приложить усилия: к
стабилизатору -
и
,
к рулю -
![]() и
и
![]() (на рис. 1.1.2,в
изображены положительные направления
векторов сил). Известно, что равнодействующие
векторов
и
,
а также и
,
и
представляют собой равные и противоположно
направленные векторы, на основании чего
(на рис. 1.1.2,в
изображены положительные направления
векторов сил). Известно, что равнодействующие
векторов
и
,
а также и
,
и
представляют собой равные и противоположно
направленные векторы, на основании чего
 (1.1.1)
(1.1.1)
Под действием этих, пока еще не известных, сил i'-я точка руля и i-я точка стабилизатора должны совместиться. Если предположить, что эти перемещения происходят лишь в плоскости сечения, то для каждой из n точек можно записать по два условия:
![]() (1.1. 2)
(1.1. 2)
Здесь
![]() и
и
![]() - перемещение i-й
точки стабилизатора в направлениях
x и y;
- перемещение i-й
точки стабилизатора в направлениях
x и y;
![]() и
и
![]() - перемещения i-й
точки руля в направлениях x
и y.
- перемещения i-й
точки руля в направлениях x
и y.
Условимся вычислять перемещения относительно оси z, считая, что она всегда проходит через точки 0 и n + 1. На основании высказанного предположения о большой жесткости стабилизатора в направлении оси x перемещение = 0 и первое условие (1.1.2) примет вид:
= 0. (1.1.3)
Такое
перемещение руля выгодно представить
в виде геометрической суммы (рис. 1.1.2,б)
перемещений:
![]() - в плоскости хорд руля и
- в плоскости хорд руля и
![]() -
по нормали к плоскости хорд, т.е.
-
по нормали к плоскости хорд, т.е.

Тогда условия (1.1.2) с учетом (1.1.3) запишутся так:
 (1.1.4)
(1.1.4)
Таких
условий можно записать 2n
для определения 2n
неизвестных
и
![]() .
.
Не
зная пока
![]() и
,
найдем перемещения, входящие в (1.1.4), от
единичного загружения. Будем последовательно
прикладывать единичную нагрузку
во всех
шарнирах навески. Приложим ее в k-м
шарнире в следующем виде: зададим
и
,
найдем перемещения, входящие в (1.1.4), от
единичного загружения. Будем последовательно
прикладывать единичную нагрузку
во всех
шарнирах навески. Приложим ее в k-м
шарнире в следующем виде: зададим
![]() и
и
![]() ,
они приложены к рулю и вызывают в i-й
точке руля перемещения
,
они приложены к рулю и вызывают в i-й
точке руля перемещения
![]() и
и
![]() .
Отыскивать перемещения стабилизатора
от нагрузки в направлении осей
и
неудобно. Лучше отыскивать перемещения
в главных центральных осях от нагрузки,
приложенной в направлении тех же
осей.
.
Отыскивать перемещения стабилизатора
от нагрузки в направлении осей
и
неудобно. Лучше отыскивать перемещения
в главных центральных осях от нагрузки,
приложенной в направлении тех же
осей.
Найдем,
таким образом:
![]()
перемещение в i-м
шарнире стабилизатора в направлении
оси y от
единичной силы, приложенной в k-м
шарнире и направленной по оси y.
Аналогичные перемещения руля
и стабилизатора в основной системе
от внешнего загружения обозначим
соответственно через
перемещение в i-м
шарнире стабилизатора в направлении
оси y от
единичной силы, приложенной в k-м
шарнире и направленной по оси y.
Аналогичные перемещения руля
и стабилизатора в основной системе
от внешнего загружения обозначим
соответственно через
![]() ,
и тогда полные перемещения можно
записать:
,
и тогда полные перемещения можно
записать:
![]()
 (1.1.5)
(1.1.5)
![]()
Условия
(1.1.4) выполнятся лишь в том случае, если
![]() в (1.1.5) примут истинные значения.
Найдем реакции из уравнений (1.1.1) с учетом
(1.1.5) и (1.1.1).
в (1.1.5) примут истинные значения.
Найдем реакции из уравнений (1.1.1) с учетом
(1.1.5) и (1.1.1).
 (1.1.6)
(1.1.6)

Преобразуем уравнения (1.1.6) к каноническому виду относительно неизвестных реакций и запишем в виде совместных подсистем:
 (1.1.7)
(1.1.7)
 (1.1.8)
(1.1.8)
коэффициенты которых имеют вид:

 (1.1.9)
(1.1.9)

Здесь
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Выражения (1.1.9) справедливы и при i = k .
Совместное решение систем (1.1.7) и (1.1.8) дает реакции и во всех n промежуточных шарнирах. Реакции в крайних шарнирах определятся так:
 (1.1.10)
(1.1.10)

Здесь
![]() и
и
![]() составляющие полных реакций в k-м
шарнире, индекс 0 и n+1
внизу означает номер шарнира, а индексы
0 или 1k
вверху определяют соответственно
загружение
основное или единичное. Например:
составляющие полных реакций в k-м
шарнире, индекс 0 и n+1
внизу означает номер шарнира, а индексы
0 или 1k
вверху определяют соответственно
загружение
основное или единичное. Например:
![]() составляющая реакции в направлении
оси y
в (n+1)-м
шарнире от основного загружения:
составляющая реакции в направлении
оси y
в (n+1)-м
шарнире от основного загружения:
![]() составляющая реакции в направлении
оси x
в нулевом шарнире от единичной силы,
приложенной в k-м
шарнире.
составляющая реакции в направлении
оси x
в нулевом шарнире от единичной силы,
приложенной в k-м
шарнире.
Достоверность результатов, полученных в §1, подтверждена экспериментально, как на моделях, так и на реальных конструкциях. Приведены результаты эксперимента на модели трехопорного руля, отклоненного на некоторый угол, сечения которого практически не закручиваются в процессе деформации, что дает нам право рассчитывать его по методу [2]. Сравнение с результатами расчета модели, проведенного указанным методом, показывает на достаточную правоверность принятых при описании предложенной расчетной схемы гипотез. Приведены результаты эксперимента горизонтального оперения самолета Як-40, хорошо согласующиеся с расчетом по вышеуказанному методу.
Создана
экспериментальная установка, внешний
вид которой представлен на фотографии
(рис. 1.1.3). Отклоненный руль моделируется
трехопорной пластинкой из материала
Д-16, длина которой 300 мм, сечение постоянно
по длине и равно 4х9х25. Соотношение между
максимальной и минимальной жесткостями
изгиба пластинки равно 26. Отклоненная
на некоторый угол пластинка загружается
силой
![]() в средней опоре, которая может перемещаться
лишь в вертикальной плоскости (на разрезе
А-А пластинка изображена в деформированном
состоянии). Такая загрузка пластинки
соответствует деформированию жесткого
на кручение руля, который навешен на
стабилизаторе абсолютно жестком в своей
плоскости, при этом руль не загружен
собственной нагрузкой, а деформируется
лишь за счет реакций
и
в средней опоре, которая может перемещаться
лишь в вертикальной плоскости (на разрезе
А-А пластинка изображена в деформированном
состоянии). Такая загрузка пластинки
соответствует деформированию жесткого
на кручение руля, который навешен на
стабилизаторе абсолютно жестком в своей
плоскости, при этом руль не загружен
собственной нагрузкой, а деформируется
лишь за счет реакций
и
![]() ,
являющихся результатом изгиба
стабилизатора.
,
являющихся результатом изгиба
стабилизатора.
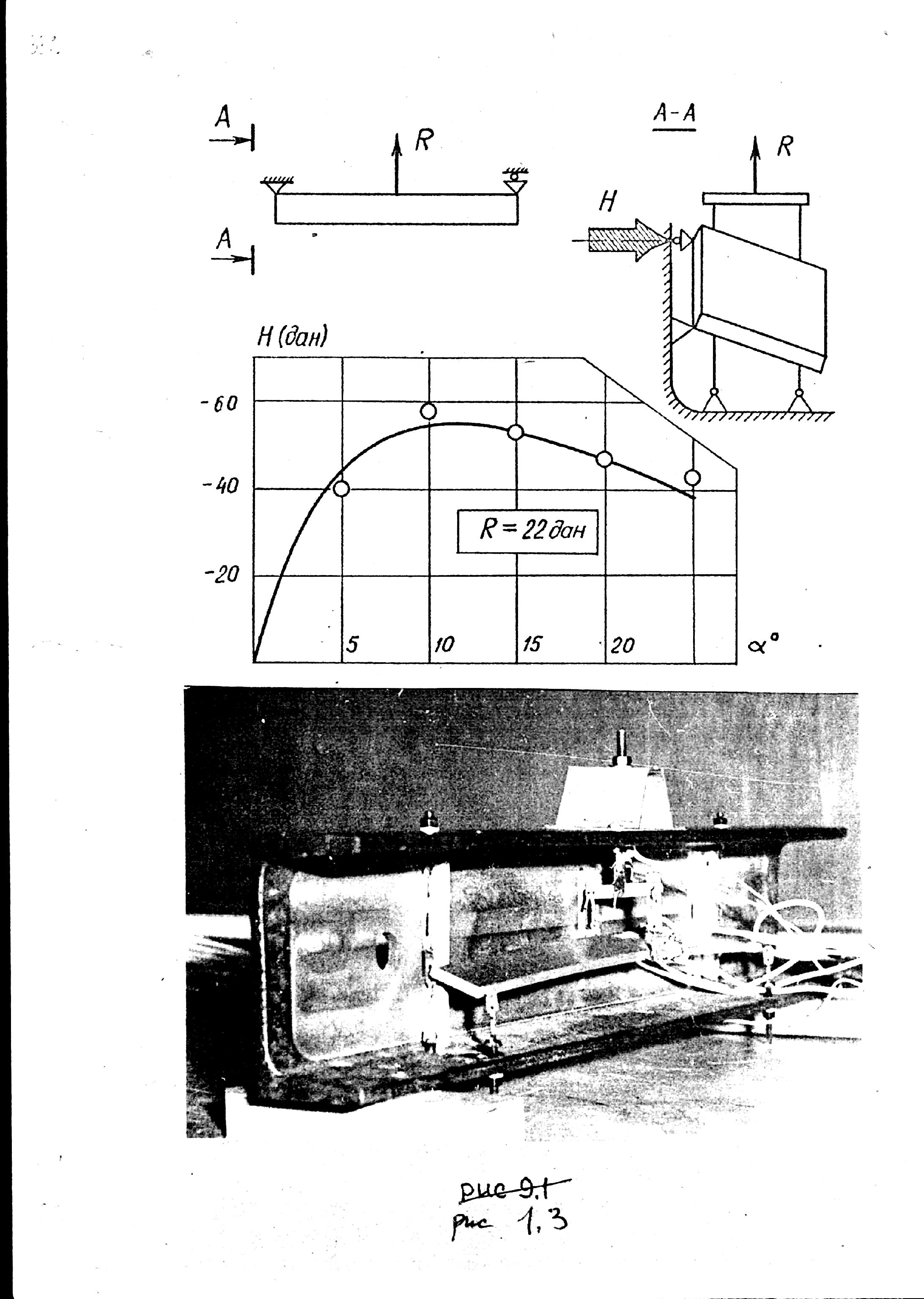

Рис . 1.1.3
Загружение
и соответствующая ему
в средней (подвижной) опоре осуществлялись
тензометрическими тягами. Изменение
по
![]() при постоянном
при постоянном
![]() дан
, полученное экспериментально, изображено
точками на графике рис. 1.1.3. Сравнение
с теоретической кривой говорит о
достоверности предложенной расчетной
схемы.
дан
, полученное экспериментально, изображено
точками на графике рис. 1.1.3. Сравнение
с теоретической кривой говорит о
достоверности предложенной расчетной
схемы.