

§2.3.Колебания катастрофического изменения формы Вводные замечания
Детальное
теоретическое и экспериментальное
исследование катастрофического изменения
в квазистатической постановке
“прощелкивания” на модели трехшарнирной
симметричной составной конструкции
представлено на рис. 2.2.6. График
(![]() )
подтверждает выводы о существовании
несмежных форм равновесия в составных
конструкциях с отклоненными рулями[4].
При увеличении нагрузки конструкция
скачком переходит из точки А в точку В
- происходит прощелкивание (катастрофа).
При разгрузке обратное прощелкивание
происходит уже при другой нагрузке
скачком из точки С в Д.
)
подтверждает выводы о существовании
несмежных форм равновесия в составных
конструкциях с отклоненными рулями[4].
При увеличении нагрузки конструкция
скачком переходит из точки А в точку В
- происходит прощелкивание (катастрофа).
При разгрузке обратное прощелкивание
происходит уже при другой нагрузке
скачком из точки С в Д.
На кривых (р), (p) (рис. 2.3.1) можно объяснить происходящее в потоке явление. Нагружение крыла, находящегося в равновесном состоянии 0-0 происходит за счет угла атаки крыла 0 и угла отклонения рулевой поверхности на угол . Аэродинамические нагрузки, определяемые этими углами, приводят к деформированию крыла. Кривая (р) определяет изменение прогиба крыла, (р) - угла закручивания руля. Если 0 и таковы, что и достигнут точек 1 на соответствующих кривых, то начнется резкий, скачкообразный переход рассматриваемого сечения в точки 2 под действием упругих сил Р и аэродинамических сил Pa. Руль закрутится, угол отклонения руля, влияющий на величину подъемной силы, уменьшится, стремясь к нулю. Аэродинамическая нагрузка, с переходом к точке 2, уменьшится на величину P1. Далее, если P1 Pкр, равное Рв - Рн , система остановится в равновесном состоянии на участке 2-3, в точке, соответствующей P1. Сечение крыла при этом перейдет из положения 1-1 в положение 2-2. Произойдет катастрофическое изменение формы (прощелкивание).
Если же P1 Pкр, то система не останется в верхнем положении, а пройдя через точку 3 (положение 3-3), под действием упругих сил Ру, устремится обратно к точке 4, к своему исходному положению. Восстанавливается форма руля, который увеличивает подъемную силу на величину P2. Если P2 Pкр, то произойдет остановка, соответствующая P2 (обратная катастрофа в область исходного равновесного состояния). Если же P2 Pкр , то система, переместившись к положению 1, совершит новую катастрофу к точке 2, то есть цикл повторится вновь. Начнутся последовательные переходы, из области одного равновесного состояния в другое и обратно - колебания катастрофического изменения формы крыла.
Теория движения составных стержней
Проблемам исследования движения конструкций, которые по своей расчетной схеме могут быть представлены стержнями, посвящена обширная литература. Это работы по колебаниям стержней в пустоте и в потоке жидкости или газа, колебания собственные и вынужденные, параметрические и аэроупругие и, наконец, линейные и нелинейные.
Свободные колебания, для исследования которых используются линейные дифференциальные уравнения, могут быть разложены по собственным формам и частотам. Проблема разложения собственных колебаний стержня на формы и частоты, начатая ещё Л.Эйлером в настоящее время хорошо разработана и считается классической.
Обращение к линеаризованным решения вынужденно, т. к. они неизмеримо проще линейных. Однако, практически, любое реальное движение упругой конструкции по своей природе нелинейно и линеаризация представляет собой, в той или иной степени, приближение. В каждом отдельном случае очень желательно знать насколько правомерна такая линеаризация.
Рис. 2.3.1
Для
построения уравнений движения достаточно
в уравнения (2.2.6) ввести инерционные(массовые)
нагрузки. Для этого достаточно погонные
нагрузки стабилизатора
![]() и
и
![]() ,
погонные нагрузки руля
,
погонные нагрузки руля
![]() ,
,![]() и моменты
и моменты
![]() ,
входящие в эти уравнения, считать суммой
аэродинамических и инерционных сил,
т.е.
,
входящие в эти уравнения, считать суммой
аэродинамических и инерционных сил,
т.е.
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
(2.3.1)
,
(2.3.1)
![]() ,
,
![]() .
.
Аэродинамические нагрузки будем считать зависящими не только от перемещений стабилизатора x0 , y0 и φ0 , перемещений руля x, y и φ (2.2.2), но и от их производных. Запишем их в решении в соответствии с [16], понимая, что лучше было бы для этого использовать метод дискретных вихрей С.М. Белоцерковского. Следует заметить, что в 70-е годы, когда строилась приведенная теория, еще не было соответствующей вычислительной техники, а в последнее время в России предельно ослаб интерес не только к новым теориям, но и к авиационной технике вообще.
Для
построения инерционных характеристик
в произвольном сечении стержня (рис.2.3.2)
закоординируем положение центра масс
(ц.м.) в подвижных осях ξη с началом в
центре жесткости сечения вектором
![]() .
.
Перемещения ц.м. связаны с перемещениями ц.ж.
![]() (2.3.2)
(2.3.2)
и определяют его ускорение (ц.м. руля)

![]() (2.3.3)
(2.3.3)
Д ля стабилизатора можно записать
![]()
Вторые члены этих выражений содержат расстояния между ц.ж. и ц.т., которыми, чаще всего, можно пренебречь в связи с большими перемещениями, свойственными обнаруженному явлению.
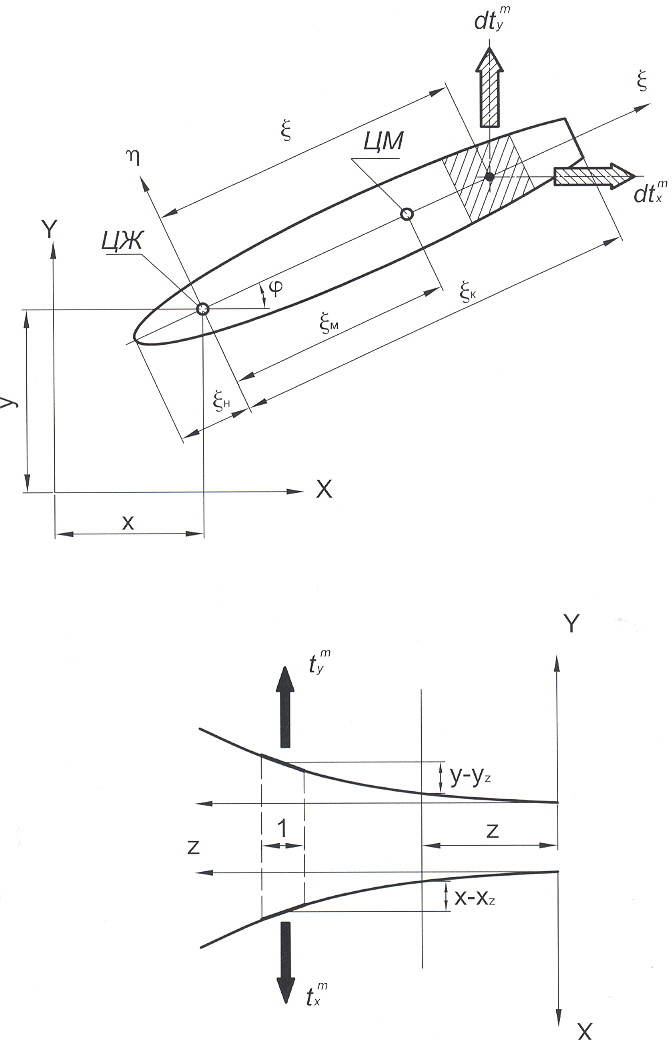



Рис. 2.3.2
Если
![]() и
и
![]() -
погонные массы стержней (руля и
стабилизатора), то погонная массовая
нагрузка
-
погонные массы стержней (руля и
стабилизатора), то погонная массовая
нагрузка
![]() ,
,
![]() ,
,
![]() ,
,
![]() (2.3.4)
(2.3.4)
Здесь
![]() ,
,
![]() ,
,
![]() -
масса единицы площади плоского стержня
(руля, крыла)
-
масса единицы площади плоского стержня
(руля, крыла)
и погонный массовый момент инерции стержня соответственно
![]() ,
,
![]() .
.
Запишем приближенные моменты и перерезывающие силы деформированных стержней на примере рулевой поверхности в соответствии с (2.2.3)
 ,
,
 ,
,

 ,
,
 (2.3.5)
(2.3.5)
к которым ещё добавятся константы.
Аналогичные уравнения записываются для стабилизатора.
Выражения
(2.3.5), представляющие собой при нижнем
пределе интегрирования
![]() уравнения равновесия, вместе с условиями
совместности(2.2.5), физическими зависимостями
Кирхгофа-Клебша (2.1.3), уравнениями связи
угловых и линейных перемещений(2.1.7) и
связи перемещений x,
y
,z
с деформациями
æx
,æy,τz
(2.1.5), записанными для руля и для
стабилизатора, составляют разрешающие
уравнения движения. Записанные через
интегрирующие матрицы и приведенные к
системе алгебраических эти уравнения
могут быть представлены в виде вектор-
функции
уравнения равновесия, вместе с условиями
совместности(2.2.5), физическими зависимостями
Кирхгофа-Клебша (2.1.3), уравнениями связи
угловых и линейных перемещений(2.1.7) и
связи перемещений x,
y
,z
с деформациями
æx
,æy,τz
(2.1.5), записанными для руля и для
стабилизатора, составляют разрешающие
уравнения движения. Записанные через
интегрирующие матрицы и приведенные к
системе алгебраических эти уравнения
могут быть представлены в виде вектор-
функции
![]() (2.3.6)
(2.3.6)
где
![]() .
.
При
численной реализации задачи за исходное
приближение неизвестных параметров
можно принять их квазистатические
значения. Инерционные составляющие при
![]() выбираются из физических соображений
достаточно произвольно. На первом шаге
выбираются из физических соображений
достаточно произвольно. На первом шаге
![]() для вычисления неизвестных можно
воспользоваться методом последовательных
нагружений, где в качестве шага берется
приращение нагрузки при изменении
времени
для вычисления неизвестных можно
воспользоваться методом последовательных
нагружений, где в качестве шага берется
приращение нагрузки при изменении
времени
![]() .
.
Тогда,
![]() .
.
На текущих азимутах приближенное решение системы определяется путем использования экстраполяционных полиномов. В качестве примера приведем экстраполяционный полином Ньютона:

![]()
![]() .
.
Для
определения векторов
![]() и
и
![]() воспользуемся
одношаговой процедурой Вильсона,
согласно которой для искомых величин
можно записать выражения:
воспользуемся
одношаговой процедурой Вильсона,
согласно которой для искомых величин
можно записать выражения:
![]() ;
;
![]() .
.
Решение уточняется итерационным методом Ньютона-Канторовича. На рис. 2.3.3 представлен фрагмент решения. Приводится сравнение нормальной и лобовой кривизны руля во времени.
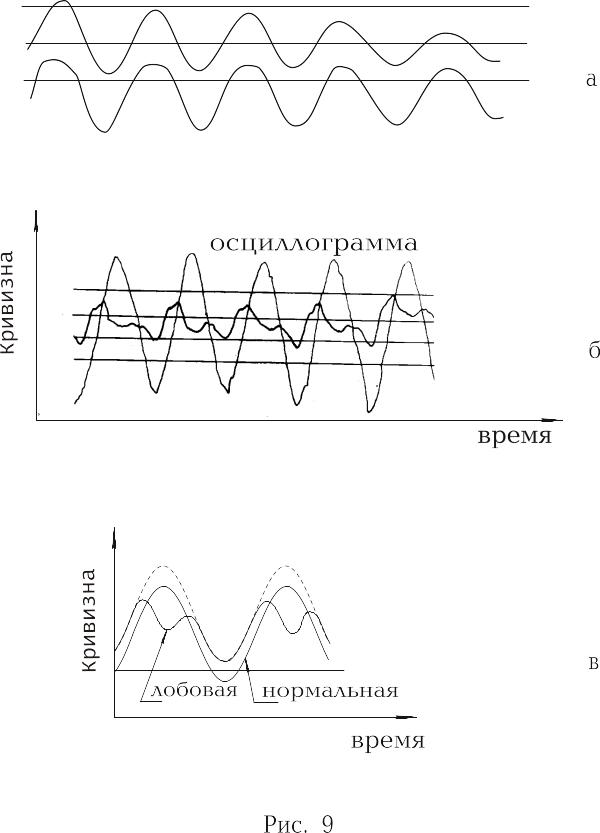
Рис 2.3.3
Детальное обсуждение рис. 2.3.3. приведено ниже вместе с результатами эксперимента.