

10)Способы включения корректирующих звеньев для уменьшения ошибок в системе. Разновидности корректирующих обратных связей
Как было показано выше, коэффициенты ошибок Ci замкнутой системы полностью определяются коэффициентами передаточной функции WpW0 .Для обеспечения требуемых значений коэффициентов ошибки в замкнутую систему дополнительно включают корректирующие звенья с передаточной функцией WКЗ такой, чтобы результирующая передаточная функция WpW0 WКЗ обеспечила требуемые значения коэффициентов ошибки Ci .
Для расширения возможностей физической реализуемости передаточных функций корректирующих звеньев их можно включать по трем схемам (рис.6.3):
- последовательно (а),
- параллельно (б),
- по схеме с обратной связью (в).
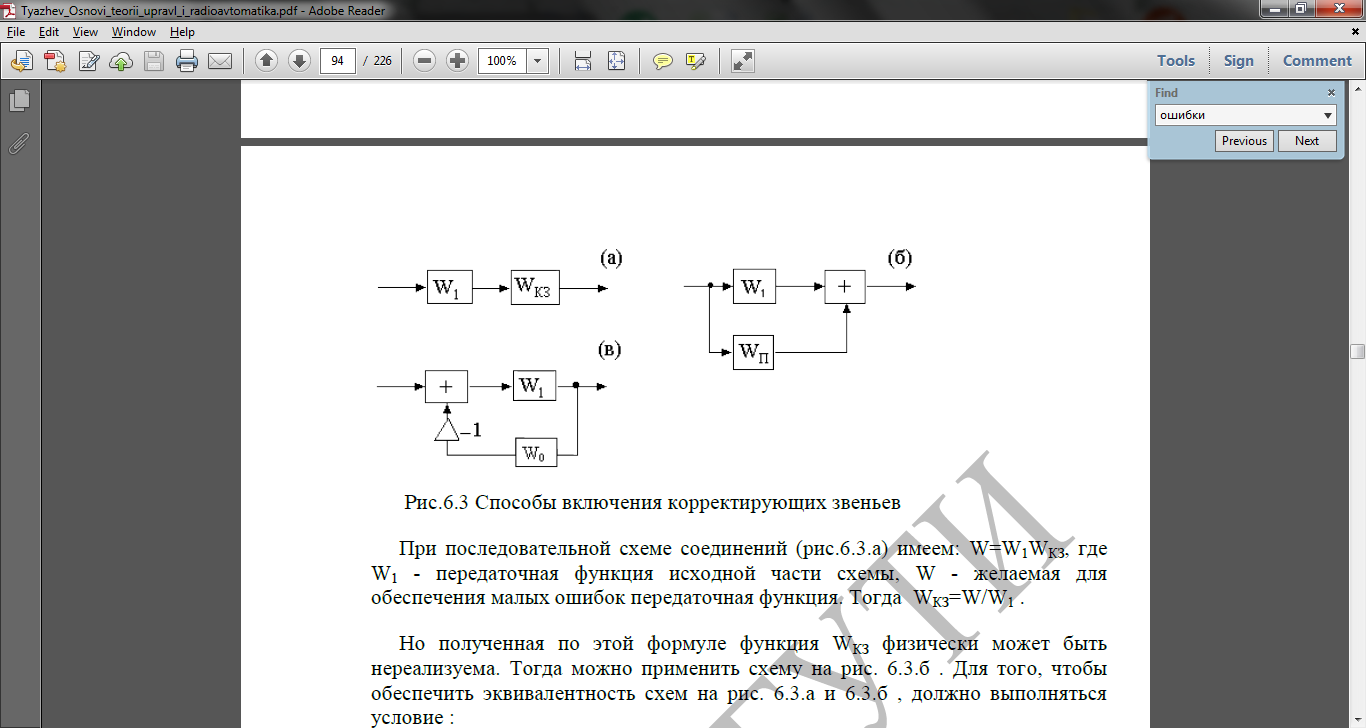
При последовательной схеме соединений (рис.6.3.а) имеем: W=W1WКЗ, где W1 - передаточная функция исходной части схемы, W - желаемая для обеспечения малых ошибок передаточная функция. Тогда WКЗ=W/W1 .
Но полученная по этой формуле функция WКЗ физически может быть нереализуема. Тогда можно применить схему на рис. 6.3.б . Для того, чтобы обеспечить эквивалентность схем на рис. 6.3.а и 6.3.б , должно выполняться условие :
W1WКЗ = W1 + WП,
откуда выражение для передаточной функции корректирующего звена при параллельном способе включения будет иметь вид :
WП = W1 (WКЗ ~ 1), где WКЗ = W/W1.
Если и такой способ включения не решит проблему реализуемости функции WП , то можно применить схему на рис. 6.3.в . В этом случае должно выполняться условие :
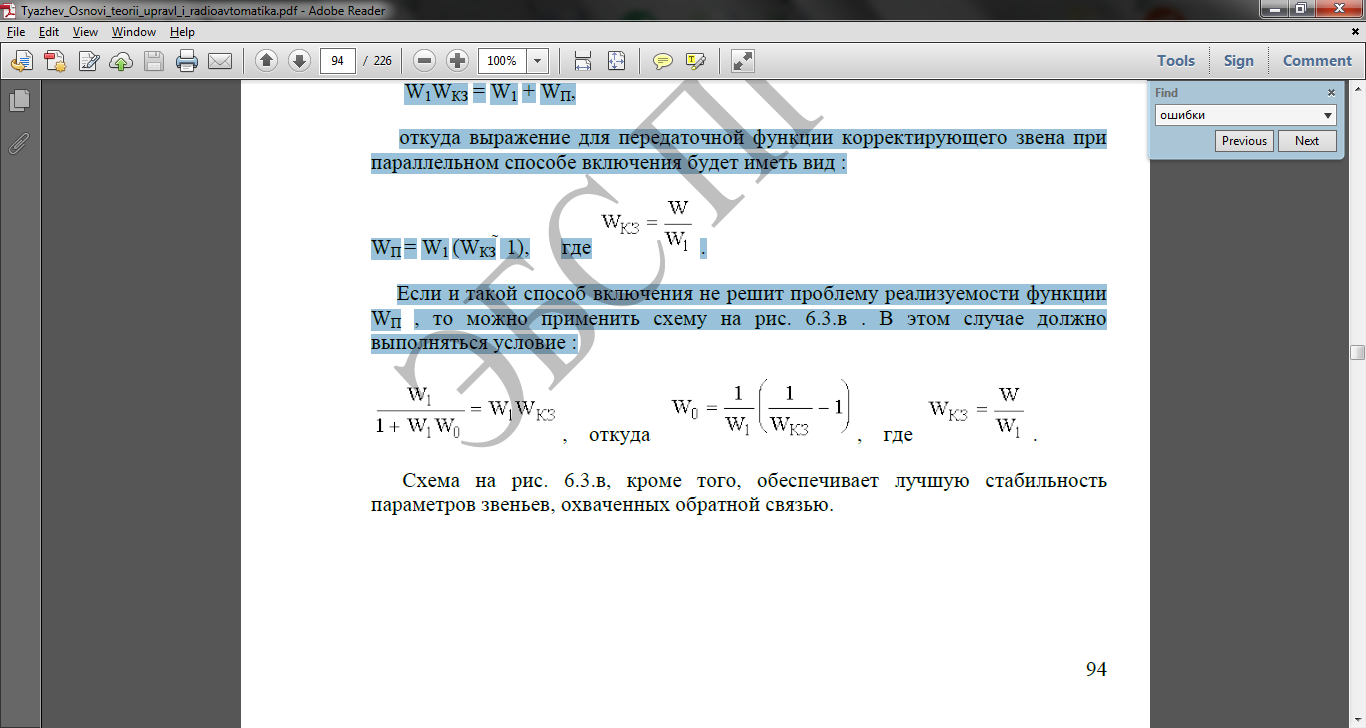
Схема на рис. 6.3.в, кроме того, обеспечивает лучшую стабильность параметров звеньев, охваченных обратной связью
Разновидности корректирующих обратных связей
Включение корректирующих звеньев по схеме с обратной связью (рис.6.3.в) позволяет изменить параметры охваченной обратной связью звеньев и даже изменить тип этих звеньев.
Покажем это на примерах.
Обратная связь
называется жесткой, когда в цепи обратной
связи включено
безынерционное
звено с передаточной функцией
W0=k0.
Если охватить
такой ОС инерционное звено с передаточной
функцией
![]() то результирующая
передаточная функция будет равна
то результирующая
передаточная функция будет равна
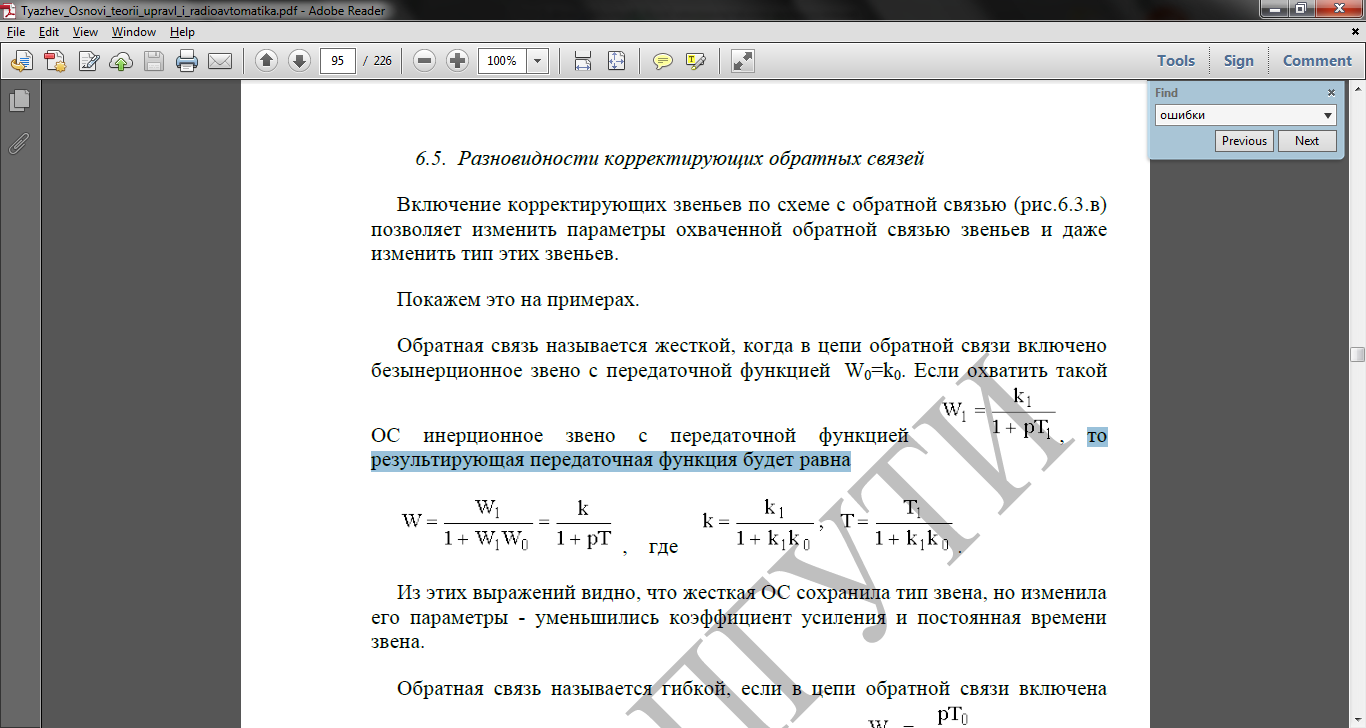
Из этих выражений видно, что жесткая ОС сохранила тип звена, но изменила его параметры - уменьшились коэффициент усиления и постоянная времени звена.
Обратная связь
называется гибкой, если в цепи обратной
связи включена дифференцирующая цепь
с передаточной функцией
![]()
Охватим такой ОС усилитель с передаточной функцией W1=k1. В результате получим
![]()
Это выражение передаточной функции для корректирующего звена с отставанием по фазе с параметром =1+k1. // абсолютно без понятия, что кроется за этим символом
Если гибкой ОС охватить интегратор, у которого W1=kи /p , то в результате получим
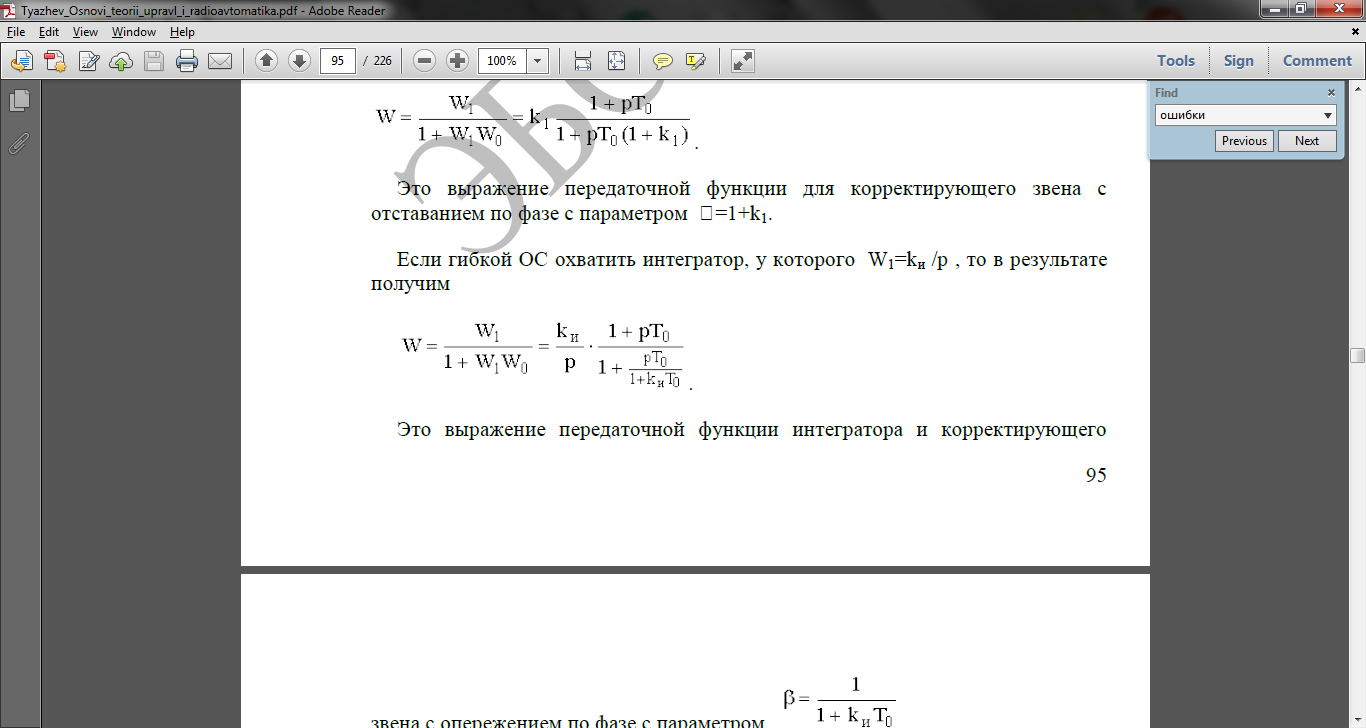
Это выражение передаточной функции интегратора и корректирующего
звена
с опережением по фазе с параметром
 Таким
образом применение различных корректирующих
обратных связей позволяет изменять не
только параметры звеньев, но даже тип
звеньев, что в конечном итоге влияет на
ошибки в замкнутых системах.
Таким
образом применение различных корректирующих
обратных связей позволяет изменять не
только параметры звеньев, но даже тип
звеньев, что в конечном итоге влияет на
ошибки в замкнутых системах.