МЕТОДЫ ИЗМЕРЕНИЯ СКОРОСТНЫХ ПАРАМЕТРОВ ЛА
Учебное пособие
СКОРОСТНЫЕ ПАРАМЕТРЫ ЛЕТАТЕЛЬНОГО АППАРАТА
Структура системы воздушных сигналов. Для управления летательными аппаратами (ЛА) первостепенное значение имеет информация о скоростных параметрах ЛА, которая поступает от приборов и систем, находящихся на борту аппарата. Из пилотажно-навигационной аппаратуры. к которой относятся барометрический высотомер; указатели приборной и воздушной скорости, числа Маха, вертикальной скорости (так называемые вариометры); датчики углов атаки и скольжения (ДУАСы), температуры наружного воздуха в данном пособии рассматриваются лишь приборы, в которых реализуются методы определения вектора воздушной скорости, а также углов атаки и скольжения. Эти приборы входят в состав так называемой бортовой системы воздушных сигналов (СВС), предназначенной для измерения высотных и скоростных параметров ЛА.
Схемы СВС в значительной мере определяются типом используемых вычислительных устройств. В настоящее время применяются СВС:
− с электромеханическими вычислительными устройствами;
− аналоговыми электронными вычислительными устройствами;
− цифровыми вычислительными устройствами.
Разработка СВС с цифровыми вычислителями отвечает общей тенденции развития авиационного оборудования и преследует цель повышения точности определения аэродинамических параметров, а также уменьшения массы и габаритов систем. Применение цифрового вычислителя позволяет также расширить функции СВС. В частности, оно обеспечивает (с привлечением информации других измерительных средств) решение задачи оценивания параметров, непосредственное измерение которых с достаточной точностью затруднено (например, угла атаки).
В соответствии с назначением СВС может быть дана ее структурная схема (рис. 1.1).
Первичными, измеряемыми, величинами являются: статистическое давление набегаюцего потока воздуха Рст , динамическое давление набегающего потока воздуха (скоростной напор) Рдини температуразаторможенного потока воздухаТ. К вычисляемым величинам относятся: высота полета аппарата H ; воздушная скоростьV ; число Маха М , т.е. отношение воздушной скорости к скорости звука на высоте полета; температура наружного воздуха ТHна высоте Н .
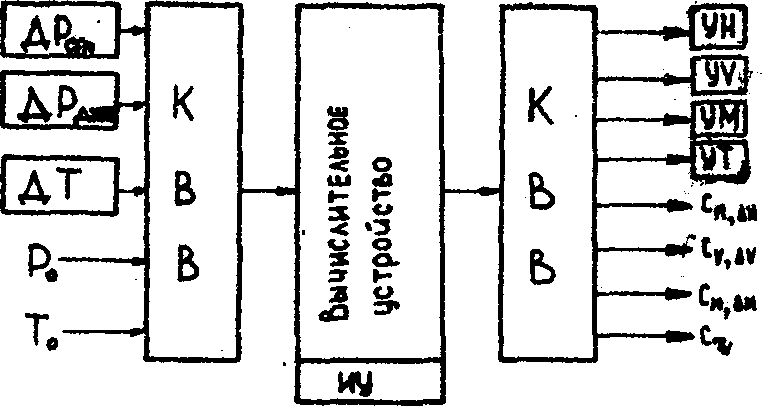
Рис. 1.1. Структурная схема СВС
На схеме (рис. 1,1) приняты следующие обозначения:ДРдин ,ДТ - датчики первичной информации о величинах Рст, Рдин и Т соответственно; P0,T0 - вводимые значения давления и температуры атмосферы у поверхности земли;КВВ - каналы ввода-вывода информации; ИУ - индикаторное устройство; YH, YV, YM, YT -дистанционные указатели параметров H, V, M, Tсоответственно. Кроме того, показаны выходные электрические сигналы, несущие информацию о параметрах H, V, M, Tи приращениях ΔH, ΔV, ΔM.
Помимо изложенной простейшей структуры, рассматриваются и расширенные структуры СВС, рассчитанных на измерение большего числа параметров [1].
Аэродинамические углы. В настоящее время информация об аэродинамических углах на летательных аппаратах, оборудованных соответствующимидатчиками или системами, используется для индикации критических режимов полета и сигнализации о них, а также для решения специальных задач. В связи с постоянным улучшением высотноскоростных характеристик самолетов и увеличением загруженности летчика возникла необходимость в существенном расширении круга задач, решаемых с применением СВС, осуществляющих получение и обработку информации об углах атаки и скольжения. К ним относятся:
− обеспечение безопасности полета путем предупреждения срывов потока, сваливания и попадания самолета в штопор;
− обеспечение оптимальных режимов взлета и посадки, а также крейсерского полета;
− повышение маневренности самолета путем использования точной информации об отклонении текущего значения угла атаки от критического;
− повышение точности решения специальных задач;
− парироание воздействия турбулентности атмосферы на самолет и др.
По имеющимся данным, от 20% до 50% летных происшествий вызваны выходом углов атаки за предельные. Материальный ущерб ВВС США от потерь, происходящих из-за сваливания самолетов и их попадания в штопор, составляет около 40 млн. долларов ежегодно.
Оптимальные режимы взлета, набора высоты, крейсерского полета, снижения и ухода на второй круг наиболее целесообразно осуществлять с помощью контроля за величиной угла атаки. Регулирование подачи топлива в зависимости от угла атаки способствует рациональному управлению тягой двигателя. Кроме того, контроль за величиной угла атаки расширяет маневренные возможности самолета, так как позволяет летчику совершать безопасное пилотирование на больших докритических углах атаки. Информация об углах атаки и скольжения имеет существенное значение в тех случаях, когда требуется точное знание направления вектора воздушной скорости.
Расширение использования информации об угле атаки вызывает необходимость определения точностных требований, предъявляемых к ней в каждом конкретном случае.
Скорость полета.Скорость полета ЛА можно измерять относительно воздушной среды или какой-либо из земных систем координат, причем можно рассматривать горизонтальную и вертикальную составляющие скорости. Обычно различают следующие скорости полета: воздушную, приборную, путевую и вертикальную.
Воздушной скоростью называется скорость движения ЛА относительно воздушной среды.
Приборной скоростью называется воздушная скорость, приведенная к нормальной плотности воздуха. Если плотность воздуха нормальная ( ρ = 1,225 кг/м3), то приборная скорость совпадает с воздушной.
Путевой скоростью называется горизонтальная составляющая скорости самолета относительно Земли. Путевая скорость равна геометрической суше горизонтальных составляющих воздушной скорости и скорости ветра.
Вертикальной скоростью называют вертикальную составляющую скорости движения ЛА относительно Земли.
Нахождение вектора воздушной скорости сводится к измерению модуля этого вектора, а также углов, определяющих его направление относительно выбранной системы координат [2]. Приборы, измеряющие модуль вектора скорости, называются указателями воздушной скорости. Их работа основана на определении избыточного давления в критической точке, т.е. точке на поверхности обтекаемого газом твердого тела, к которой поток газа (воздушный поток) подходит по нормали к поверхности. В критической точке скорость газа равна нулю и вся энергия набегающего потока переходит в энергию давления. Избыточное давление в критической точке
![]() (1.1)
(1.1)
где Р - полное давление в критической точке; Pст - статическое (атмосферное) давление на высоте полета.
Связь между воздушной скоростью V и избыточным давлением ΔР в критической точке устанавливается на основании уравнения Д. Бернулли. Для дозвуковой скорости
 (1.2)
(1.2)
где k - показатель, равный отношению удельных теплоемкостей при постоянном давлении и постоянном объеме; g - ускорение силы тяжести; R - газовая постоянная; Т - абсолютная температура воздуха.
Для воздуха при нормальных условиях k = 1,4.
При сверхзвуковых скоростях полета связь между V и ΔР в критической точке определяется формулой Релея:
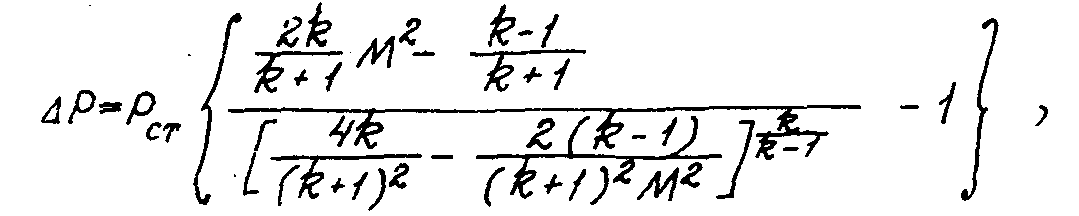 (1.3)
(1.3)
где
M - число Maxa, M=Y/a,
a-
скорость звука на высоте полета,
 .
.
При воздушной скорости, равной скорости звука, обе формулы дают одинаковые результаты.
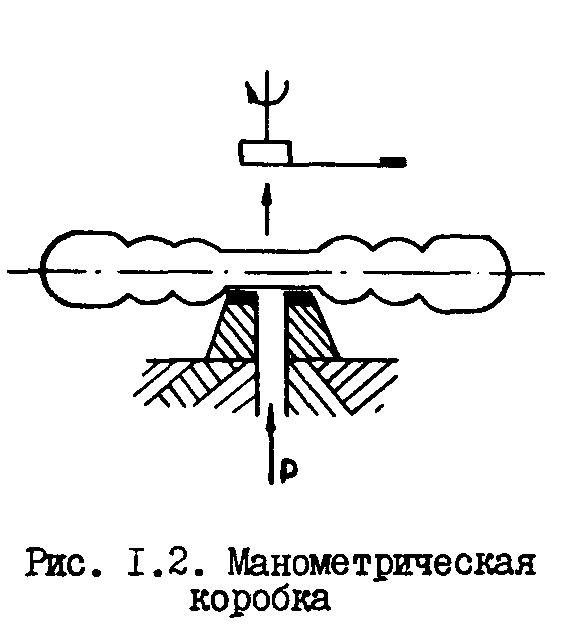
Избыточное давление ΔР измеряется с помощью манометрической коробки (рис. 1.2). Внутренняя полость коробки соединяется с приемником полного давления Р, а сама коробка устанавливается в герметичном корпусе, внутренняя полость которого соединяется с приемником статического давления Pст .
На
мембраны коробки действует разность
давлений
 ст
и положение центра свободной
ст
и положение центра свободной
мембраны
изменяется в зависимости от
 . Статическое давление измеряется с
помощью
. Статическое давление измеряется с
помощью
анероидной коробки.
Температуру наружного воздуха T измеряют
термометром. Если вместо температуры T определяется
T ст, т.е. температура стандартной атмосферы, то шкала
указателя скорости показывает значения приборной скорости Vпр , которая находится по формуле

Независимо от принятого выражения для определения воздушной скорости вводится аэродинамическая поправка Δ V, учитывающая искажение потока, обтекающего приемник давления. Тогда воздушная скорость V может быть найдена по формуле
![]()
где T ст - функция высоты полета H.
При
полете ЛA важнейшими
параметрами, физически связывающими
полетные характеристики самолета с
параметрами атмосферы Земли и внешних
воздействий, являются угол атаки α
и угол скольжения β.
Аэродинамическими углами α
и β
определяется направление продольной
оси ЛА относительно направления вектора
 .
.
Углом атаки α называют угол между проекцией вектора воздушной скорости V на плоскость симметрии самолета и связанной продольной осью ЛА (рис. 1.3). Углом скольжения β называют угол между вектором воздушной скорости и плоскостью симметрии ЛА (рис. 1.3).
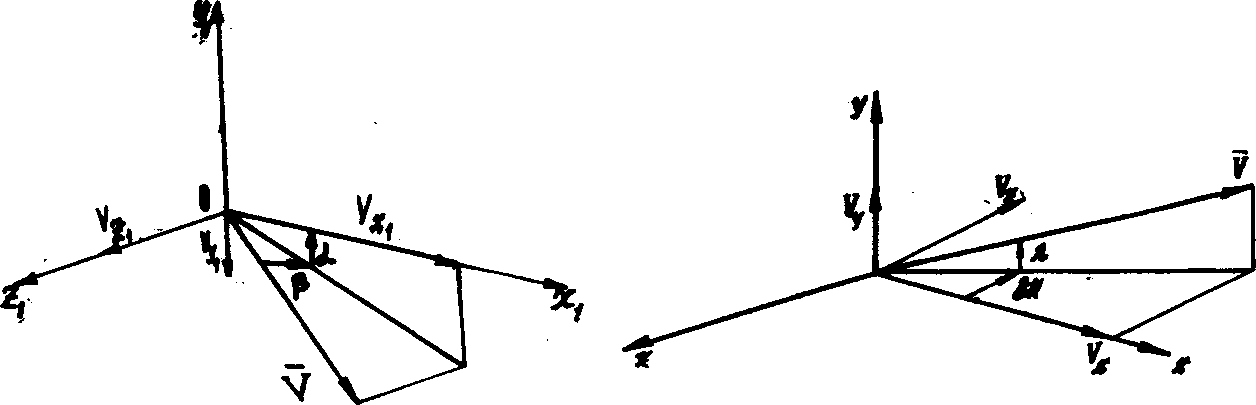

Проекции вектора на оси связанной системы координат следующие:

При малых значениях углов α и β получим

Определим направление вектора скорости в стабилизированной системе координат OXYZ, где ось OY направлена вверх. Пусть ось OX лежит, в плоскости 0ХУ приборного курса ЛА (рис. 1.4). Тогда направление вектора скорости определяется углом находящимся между плоскостью приборного курса и плоскостью курса ЛА, и углом λ наклона вектора скорости относительно горизонта.
(λ - угол, называемый углом кабрирования при отсчете вверх от линии горизонта или углом пикирования - при отсчете вниз от той же линии.) В соответствии с рис. 1.4 имеем

где VxVyVz, проекции вектора скорости V на оси OX, OY, OZ.
Используем матрицу перехода от стабилизированной системы координат OXYZ к связанной системе OX1Y1Z1. Получим проекции вектора скорости на оси стабилизированной системы:

где ϑ и γ - углы тангажа и крена соответственно.
Подставляя
второе выражение из (1.10) в (1.9) с учетом
малости величины
 ,
получаем
,
получаем
 откуда
откуда
![]()
Подставим первое и третье выражения из (1.10) в (1.8), получим

Из
(I.II) следует
 .
Тогда выражение δK
примет вид
.
Тогда выражение δK
примет вид

В
частном случае при
 = 0 из формул (I.I2)
и (I.I3)
следует, что
= 0 из формул (I.I2)
и (I.I3)
следует, что
 ;
;
δK=- .
Если
.
Если
 ,
то
,
то
 ,
δK=-
,
δK=- .
.
Измерив приборный курс Кпр и вычислив угол δK, можно найти курс ЛA

Угол определяется и другим способом. Проекция
Vу=
определяется и другим способом. Проекция
Vу=
 может
быть найдена инерциальным или доплеровским
способом и измерена с помощью
вариометра. После измерения воздушной
скорости V
угол
вычисляется по формуле (1.9).
может
быть найдена инерциальным или доплеровским
способом и измерена с помощью
вариометра. После измерения воздушной
скорости V
угол
вычисляется по формуле (1.9).
2.Прямые методы и средства измерения аэродинамических углов
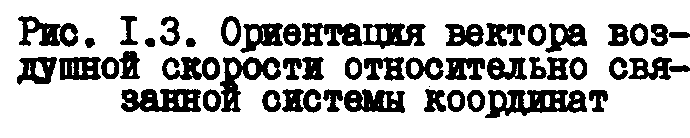
Флюгерный метод. Наиболее простым способом измерения углов атаки и скольжения является флюгерный метод. Флюгер представляет собой чувствительный элемент с симметричным профилем, свободно вращающийся вокруг оси. Под воздействием воздушного потока, имеющего скорость V, флюгер занимает положение, соответствующее его наименьшему аэродинамическому сопротивлению, и устанавливается параллельно вектору скорости . Если флюгер плоский с одной степенью свободы (рис. 2.1), то им можно измерять только один аэродинамический угол, но если флюгер конусообразный с двумя степенями свободы (рис. 2.2), то им можно измерять сразу н угол атаки (рис. 2.2,а), и угол скольжения (рис. 2.2,б). Как правило, с осью флюгера связан какой-нибудь преобразователь угла поворота в электрический сигнал (типа потенциометра или синусно-косинусного трансформатора) [4].
Флюгерные датчики угла атаки (рис. 2.3,а) и скольжения (рис. 2.3,6) нашли широкое распространение в авиации из-за своей простоты изготовления, небольшой массы, широкого диапазона измеряемых аэродинамичебких углов (±90 град.). Однако следует отметить их чувствительность к случайным местным возмущениям воздушного потока, что приводит к колебаниям флюгера, а значит, к износу дорожек потенциометров и колебанию стрелок прибора. В турбулентном потоке воздуха флюгер также подвергается воздействию возмущений высокой частоты, вследствие чего возникает явление резонанса. При полетах в неблагоприятных погодных условиях часто происходит обледенение флюгера, его разбалансировка, и он может полностью утратить свою работоспособность.
С введением системы обогрева неизбежно растут габариты и масса флюгера, что снижает его частотные характеристики и механическую прочность. Недостатком флюгерных датчиков является и то, что они измеряют местные аэродинамические углы, т.е. углы в месте установки. При наличии скольжения флюгер может попасть в "аэродинамическую тень" фюзеляжа, что может вызвать появление ошибок измерения. Флюгеры устанавливают на концах крыльев ЛА или на корпусе с помощью вынесенной штанги или без нее. Однако эти решения имеют тот недостаток, что и крыло, и штанга в полете под воздействием скоростного напора и перегрузок значительно изгибаются, в результате ошибки измерения углов могут быть значительны [ II ].
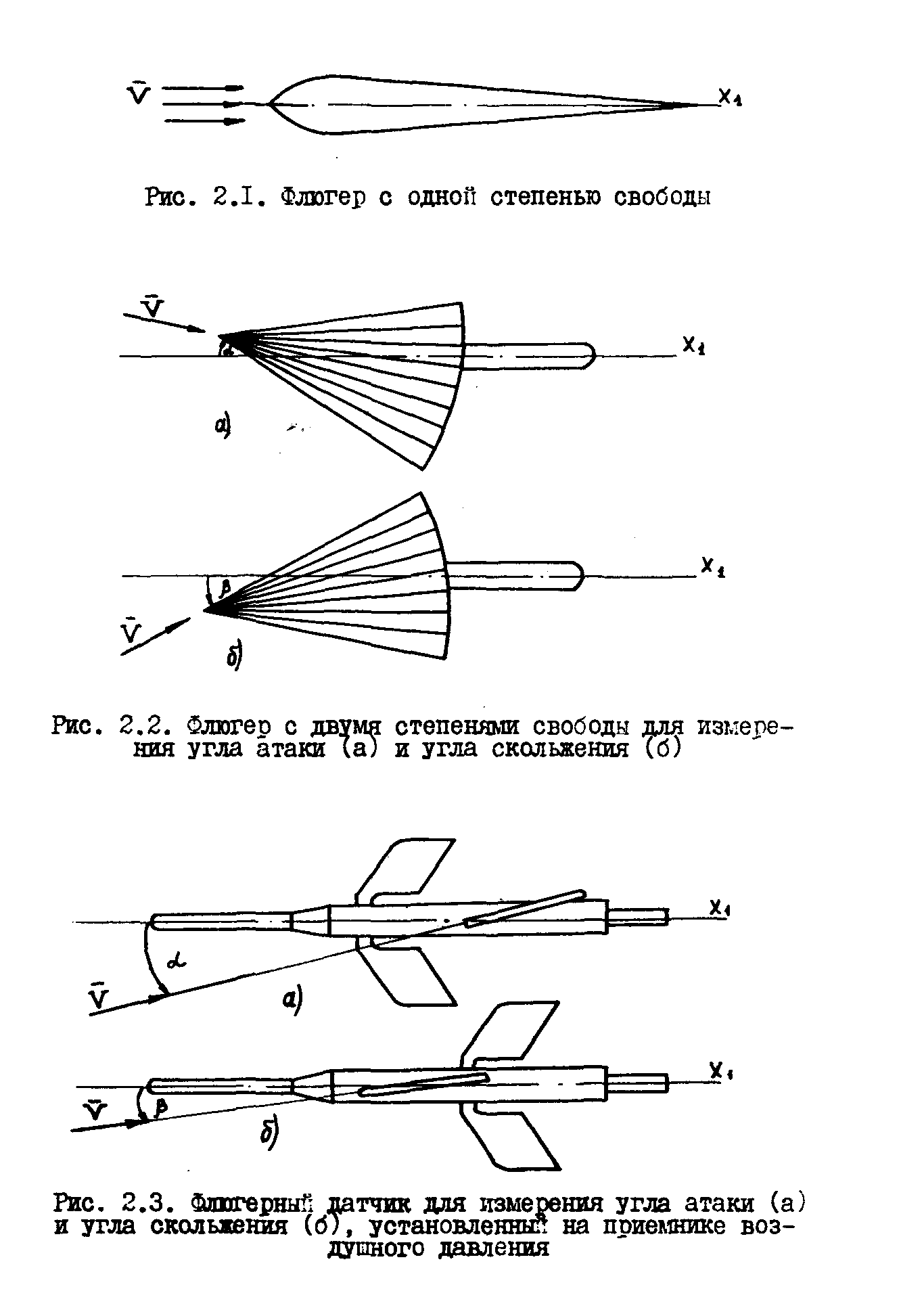
Щелевой метод. Примером реализации щелевого метода может служить щелевой датчик, принцип работы которого следующий. Под воздействием набегающего потока головка прибора, представляющая собой поперечно обтекаемый цилиндр или конус со щелевыми отверстиями для приема воздушного давления, устанавливается в такое положение, при котором плоскость симметрии отверстий совпадает с направлением потока (рис. 2.4).
Щели
1, 2 чувствительной головки 3 через
трубопроводы 4 и 5 соединены с полостями
6 и 7 соответственно. Скоростной напор
( 0)
, набегающий на чувствительную головку,
создает на щелях 1 и 2
давления Р1
и Р2,
которые передаются по трубопроводам в
камеру, причем давление Р1
действует на перегородку 8 против часовой
стрелки, а давление Р2
- по часовой стрелке. Если щели расположены
симметрично вектору скоростного напора
0
, то давления Р1
и Р2
равны и перегородка неподвижна. Если
вектор изменит свое направление на
угол α
(показано штриховой линией), симметрия
обтекания чувствительной головки 3
нарушится, причем Р2
станет больше Р1
и перегородка 8 вместе с чувствительной
головкой 3 будет поворачиваться по
часовой стрелке до тех пор, пока вектор
снова не станет симметричен относительно
обеих щелей 1 и 2. Прибор работает по
принципу отслеживания "нуля"
разности давлений на чувствительную
головку со щелями. Угол поворота головки
3 является мерой угла атаки или
скольжения, преобразование которого в
электрический сигнал с помощью
потенциометра, сельсина и др. не
представляет какого-либо труда.
0)
, набегающий на чувствительную головку,
создает на щелях 1 и 2
давления Р1
и Р2,
которые передаются по трубопроводам в
камеру, причем давление Р1
действует на перегородку 8 против часовой
стрелки, а давление Р2
- по часовой стрелке. Если щели расположены
симметрично вектору скоростного напора
0
, то давления Р1
и Р2
равны и перегородка неподвижна. Если
вектор изменит свое направление на
угол α
(показано штриховой линией), симметрия
обтекания чувствительной головки 3
нарушится, причем Р2
станет больше Р1
и перегородка 8 вместе с чувствительной
головкой 3 будет поворачиваться по
часовой стрелке до тех пор, пока вектор
снова не станет симметричен относительно
обеих щелей 1 и 2. Прибор работает по
принципу отслеживания "нуля"
разности давлений на чувствительную
головку со щелями. Угол поворота головки
3 является мерой угла атаки или
скольжения, преобразование которого в
электрический сигнал с помощью
потенциометра, сельсина и др. не
представляет какого-либо труда.
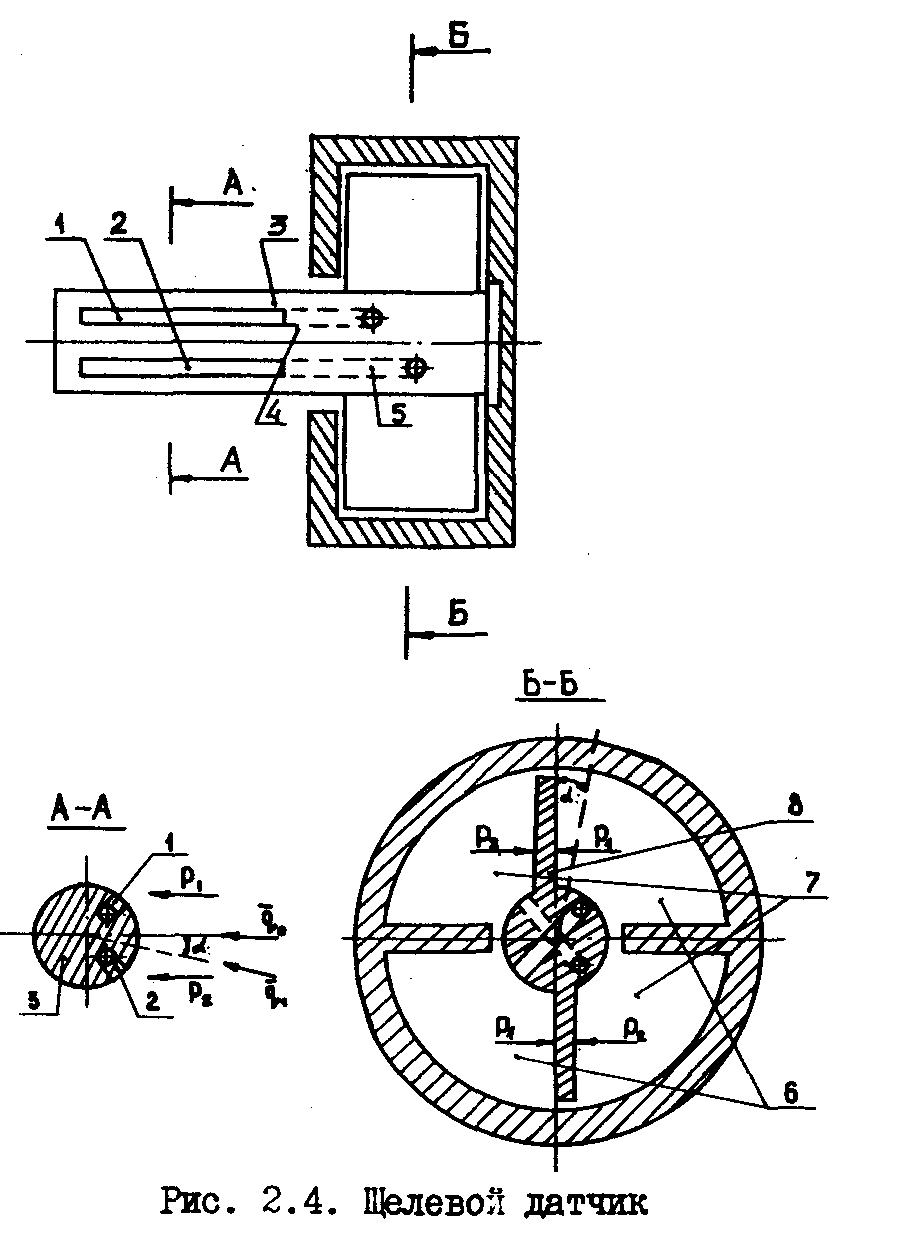
Щелевые датчики имеют некоторые преимущества перед флюгерными. Они обладают лучшими балансировочными характеристиками, так как основные детали поворотной чувствительной головки представляют собой тела вращения, точность изготовления которых выше, чем у флюгерных. Значительно меньше энергии расходуется на обогрев, поскольку охлаждаемая площадь чувствительной головки конической или цилиндрической формы значительно меньше. Кроме того, у щелевого датчика ниже частота собственных колебаний подвижной части, и, изменяя длину и площадь сечения каналов 4 и 5 (рис. 2.4), можно легко добиться требуемой постоянной времени прибора. Еще одним преимуществом щелевых датчиков перед флюгерными является то, что не нужно специального устройства для демпфирования колебаний: роль демпфера выполняют воздушные каналы и полости. Однако эти датчики весьма чувствительны к попаданию пыли и влаги во внутреннюю полость и трубопроводы. Засорение одного из воздушных каналов создает дополнительную асимметрию, особенно в переходных режимах. При этом разность давлений в приемных отверстиях не будет равна разности давлений в полостях корпуса, что приведет к появлению дополнительной ошибки. Кроме того, попадание пыли или влаги в подшипники либо в зазор между корпусом и поворотной перегородкой существенно повышает момент трения подвижной части, что влияет на порог чувствительности и точность показаний прибора. Хотя момент трения в подшипниках очень мал, увеличение полного давления на чувствительную головку может снизить точность прибора. С другой стороны, при уменьшении давления ниже некоторого значения, когда моменты трения станут соизмеримы с моментами, вращающими подвижную перегородку, точность также может резко снизиться.
Щелевой метод с силовой компенсацией. В отличие от рассмотренного выше метода при реализации щелевого метода с силовой компенсацией чувствительная головка поворачивается с помощью сервопривода. Эта головка имеет два отверстия в соответствующей плоскости ее сечения и способна одновременно измерять оба аэродинамических угла. Отверстия попарно симметричны относительно измерительной оси головки. Головка может иметь как сферическую форму, если измеряются оба угла, так и поперечно обдуваемую цилиндрическую или коническую форму, если измеряется один из аэродинамических углов. Головка одновременно может быть использована для забора полного и статического давлений и способна заменить трубку приемника воздушного давления. В этом случае датчик устанавливается на выносной штанге на крыле ЛA в зоне невозмущенного потока.
На рис. 2.5 приведена схема прибора, измеряющего угол атаки. Если направление скоростного напора 0 совпадает с осью симметрии чувствительной головки 1, то давления Р1 и Р2 в отверстиях 2 равны и система находится в равновесии.
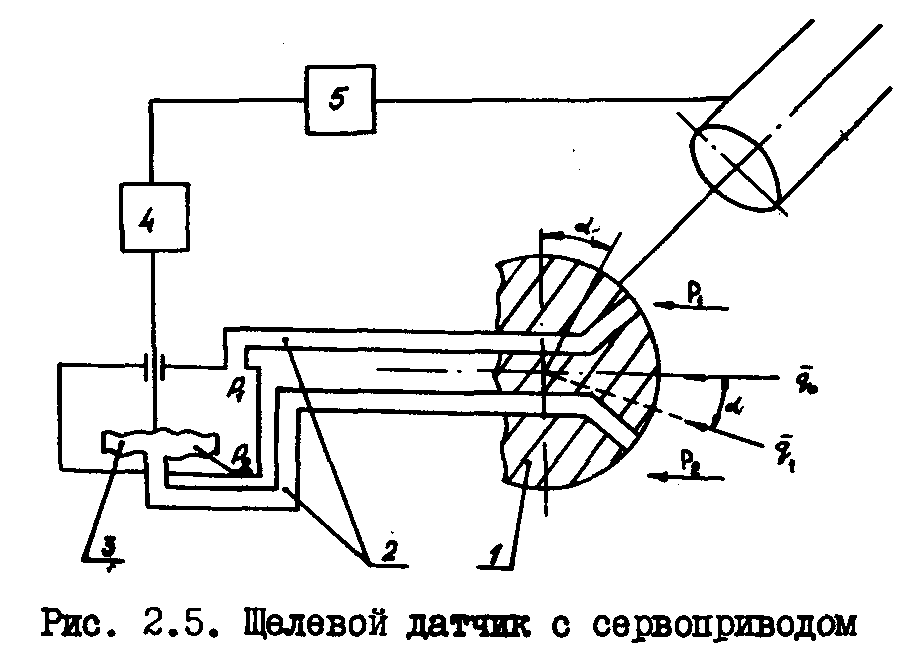
При изменении направления скоростного напора 0 (показано штриховой линией) Р2, становится больше Р1, упругий центр чувствительного элемента 3 перемещается вверх. Это движение преобразуется датчиком 4 в напряжение, которое усиливается усилителем 5 и поступает на серводвигатель, поворачивающий чувствительную головку 1 по направление, соответствующему уменьшению разности давлений Р2-Р1. Когда разность давлений снизится до порога чувствительности системы, входной сигнал с датчика 4 станет равен нулю и поворот головки прекратится.
Рассматриваемые датчики аэродинамических углов обладают высокой чувствительностью к перепаду давлений в отверстиях, что позволяет применять их в широком диапазоне изменения скоростного напора. Важным достоинством устройств такого типа является то, что в них можно совместить датчики углов атаки, скольжения и приемника воздушного давления, причем могут быть измерены как большие, так и малые аэродинамические углы. Кроме того, приборы отслеживания нулевой разности давлений с силовой компенсацией менее чувствительны к попаданию пыли и влаги, а также к изменению коэффициента трения в подшипниках, чем приборы без силовой компенсации.
Недостатком подобных приборов являются сложность конструкции, большие масса и габаритные размеры, способность измерения лишь местных аэродинамических углов.
Метод, основанный на измерении давления в фиксированных точках на поверхности тел. неподвижных относительно ЛА. Характеристики обтекания многих тел воздушным потоком при различных направлениях обдува могут быть описаны математически достаточно просто. Например, зависимость давления на поверхности конуса или полусферы от угла атаки близка к линейной при постоянной скорости потока.
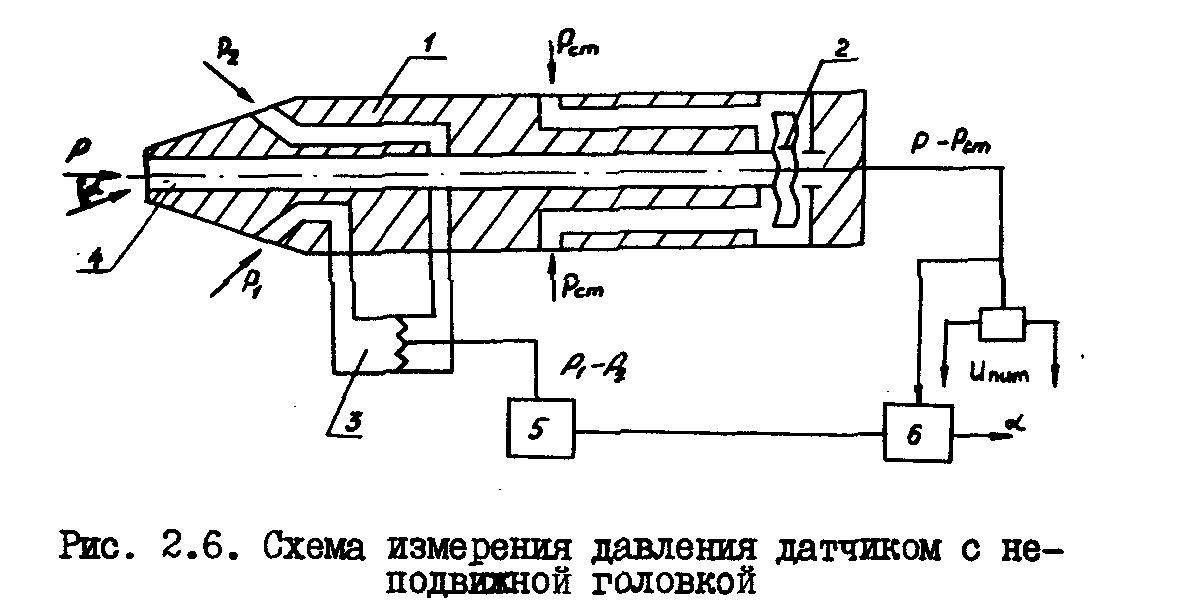
Рассмотрим схему измерения давления (рис. 2.6). По оси головки выполнено центральное отверстие для приема полного давления набегающего воздушного потока Р , на цилиндрической части 1 головки имеется отверстие 4 для приема статического давления Рст. Замер разности давлений Р-Рст производится
датчиком
2. На конической поверхности головки
на одинаковом расстоянии от центрального
отверстия выполнено еще два отверстия,
которые позволяют с помощью датчика
3 получить разность давлений Р1-Р2,
пропорциональную углу атаки α,
т.е. Р1-Р2=kα
при Известно, что относительное давление
Р(α)=(Р1-Р2)/Рдин
(где
динамическое давление Рдин=
Р-Рст
) не зависит от скорости
полета и является линейной функцией
угла атаки в некотором диапазоне углов
атаки и скоростей полета. Если сигнал,
пропорциональный Р1-Р2,
с преобразователя 5 поделить на сигнал,
пропорциональный динамическому
давлению Рдин=
Р-Рст
,
то на выходе делителя 6 получим сигнал,
пропорциональный углу атаки для всех
скоростей полета [б, 7].
Известно, что относительное давление
Р(α)=(Р1-Р2)/Рдин
(где
динамическое давление Рдин=
Р-Рст
) не зависит от скорости
полета и является линейной функцией
угла атаки в некотором диапазоне углов
атаки и скоростей полета. Если сигнал,
пропорциональный Р1-Р2,
с преобразователя 5 поделить на сигнал,
пропорциональный динамическому
давлению Рдин=
Р-Рст
,
то на выходе делителя 6 получим сигнал,
пропорциональный углу атаки для всех
скоростей полета [б, 7].
Преимущество датчиков аэродинамических углов с неподвижной чувствительной головкой прежде всего заключается в простоте конструкции головки и ее универсальности. Эти датчики можно изготовить на базе приемника воздушного давления, причем для измерения углов атаки и углов скольжения одновременно.
Следует отметить ряд недостатков, которые ограничивает применение рассмотренных датчиков на современных самолетах. Прежде всего это небольшой диапазон измеряемых углов, который не превышает -25 град. Еще более существенным недостатком этих приборов является то, что их чувствительность линейно зависит от скорости воздушного потока, достигающей значений 0,6-0,7 М, т.е. когда можно не учитывать сжимаемость воздуха. При скоростях, больших
0,7 М, эта зависимость существенно нелинейна из-за появления местных скачков уплотнения, и учитывать ее довольно сложно [7]. Кроне того, в приборах используются устройства деления, которые также могут вносить погрешность в измерения. К тому же величина Скоростного напора входит в знаменатель выражения для определения угла атаки, а следовательно, все ошибки измерения скоростного напора влияют на точность определения угла атаки. Неподвижная головка более чувствительна к обледенению, чем головка с отслеживанием нулевой разности давлений, поскольку аэродинамический нагрев будет больше проявляться на отверстии, расположенном ближе к критической точке [12].
Существует много разновидностей приборов, принцип действия которых основан на зависимости распределения давления на неподвижной головке от направления обдува. В литературе приводится несколько схем приборов, носящих название “насадок ЦАГИ”: цилиндрический насадок, шестиствольный насадок, клиновидный насадок. Измерение давления в них может быть произведено непосредственно в носовой части фюзеляжа, на крыле ЛА и т.д.
Несмотря на множество технических решений, основанных на рассмотренном методе измерения, применение таких приборов на современных самолетах пока затруднено [4].
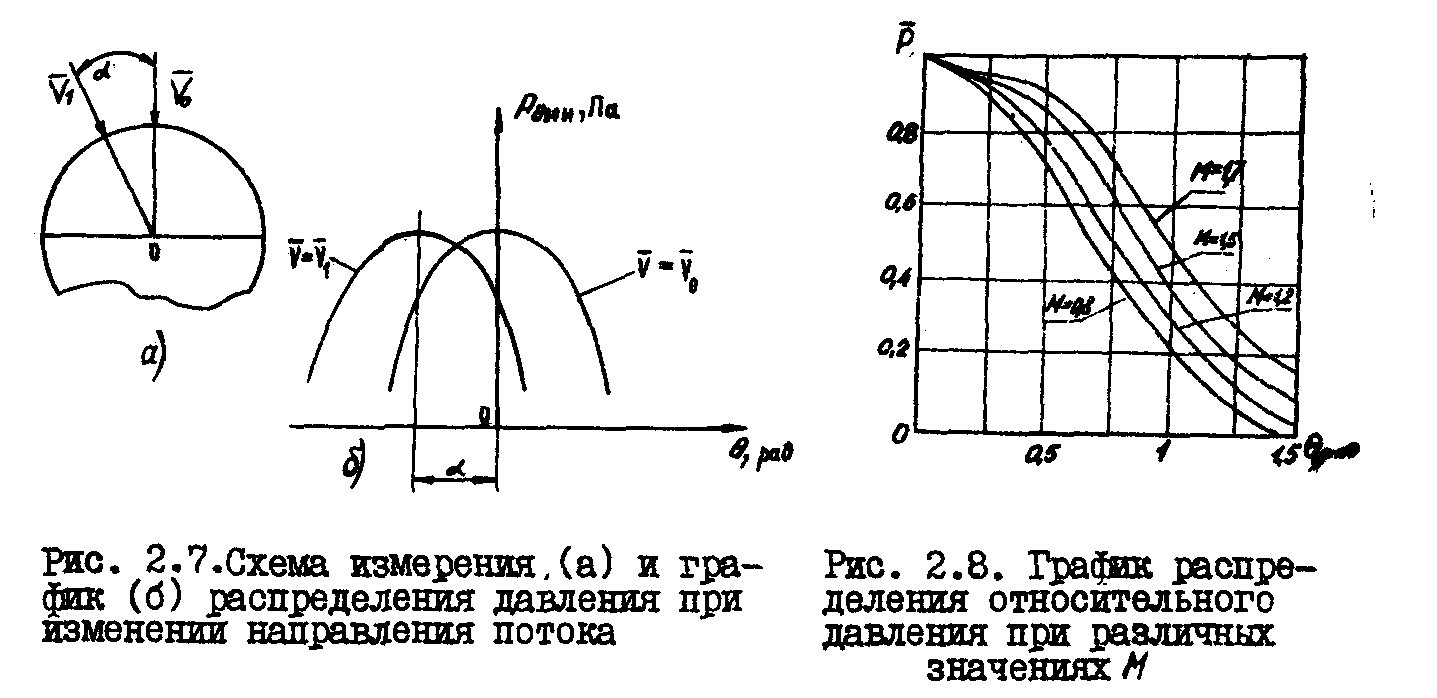
Метод, основанный на анализе распределения давления на сферической лобовой поверхности. Этот метод может быть реализован дренированием носовой части ЛА, имеющей форму полусферы, или с помощью выдвижного зонда, головная часть которого выполнена в виде элемента полусферы [9]. Распределение динамической составляющей Рдин полного давления по сферической поверхности можно представить кривой, симметричной относительно критической точки, в которой вектор скорости V набегающего потока максимален и нормален к поверхности [9].
На рис. 2.7 показаны кривые распределения Рдин по Θ, где Θ - текущее значение сферической_коорцинаты. При изменении направления скорости потока с 0 на 1 кривая Рдин(Θ) в данных координатах также смещается, хотя ее максимум по-прежнему определяется положением критической точки, т.е. углом атаки. При изменении значения числа Маха также изменяется характер кривой давления, однако максимум, как и ранее, расположен в критической точке.
На
рис. 2.8 приведены кривые распределения
относительного динамического давления
 в зависимости от Θ
для различных значений M.
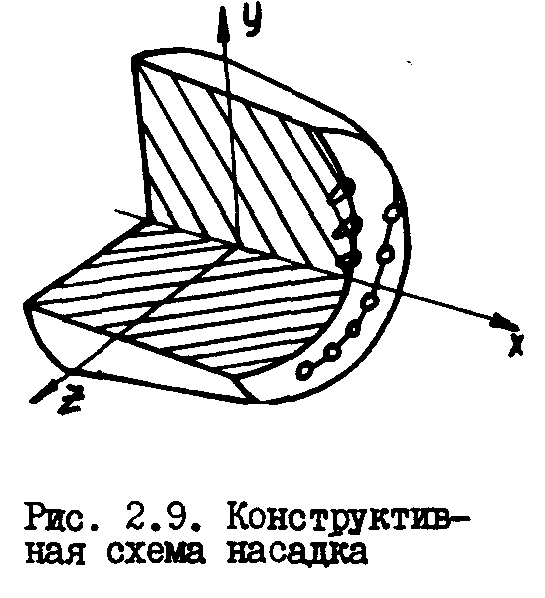
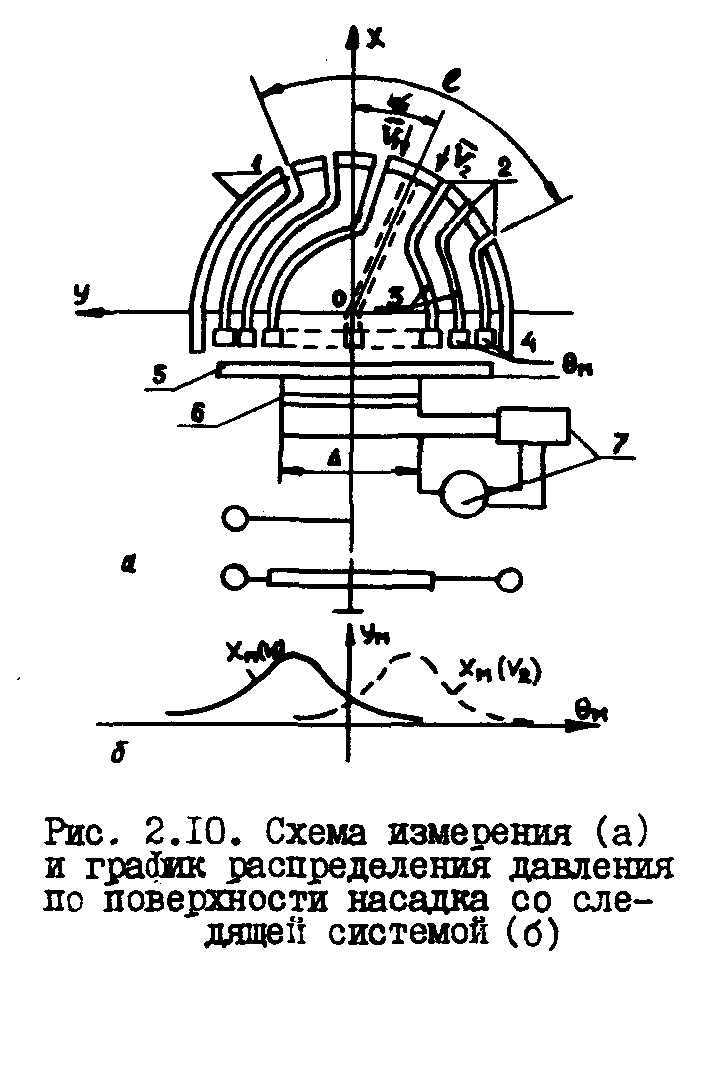
На рис. 2.9 приведена конструктивная
схема насадка, а на рис. 2.10,
а - схема измерения распределения
давления. Сферическая поверхность
1 имеет два ряда дренажных отверстий 2,
расположенных в продольной плоскости
ЛА для измерения угла атаки на дуге
l и в плоскости,
нормальной к продольной, для измерения
угла скольжения. Дренажные отверстия
соединены каналами 3 с датчиками давления
4. Сигналы с датчиков подаются на линейный
потенциометр 5, представляющий модель,
воспроизводящую в виде напряжения
распределение динамического давления
для каждой измерительной плоскости.
в зависимости от Θ
для различных значений M.
На рис. 2.9 приведена конструктивная
схема насадка, а на рис. 2.10,
а - схема измерения распределения
давления. Сферическая поверхность
1 имеет два ряда дренажных отверстий 2,
расположенных в продольной плоскости
ЛА для измерения угла атаки на дуге
l и в плоскости,
нормальной к продольной, для измерения
угла скольжения. Дренажные отверстия
соединены каналами 3 с датчиками давления
4. Сигналы с датчиков подаются на линейный
потенциометр 5, представляющий модель,
воспроизводящую в виде напряжения
распределение динамического давления
для каждой измерительной плоскости.
При изменении угла потока α кривая распределения давления будет перемещаться в сферических координатах поверхности, а ее максимум будет определяться направлением потока 1 или 2 . Изображенная на рис. 2.10,б кривая распределения напряжения будет перемещаться в координатах модели Θ, и по положению кривой, однозначно связанному с распределением динамического давления, можно определить в продольной плоскости угол атаки, а в нормальной к продольной - угол скольжения. Для этого модель снабжается устройством поиска максимума. В случае использования в качестве модели линейного равносекционного потенциометра 5 устройство поиска максимума может быть выполнено в виде установленных на расстоянии ∆ двух жестко связанных между собой щеток 6, разность сигналов с которых подается на следящую систему 7, приводящую щетки в равносигнальное положение, симметричное относительно максимума.
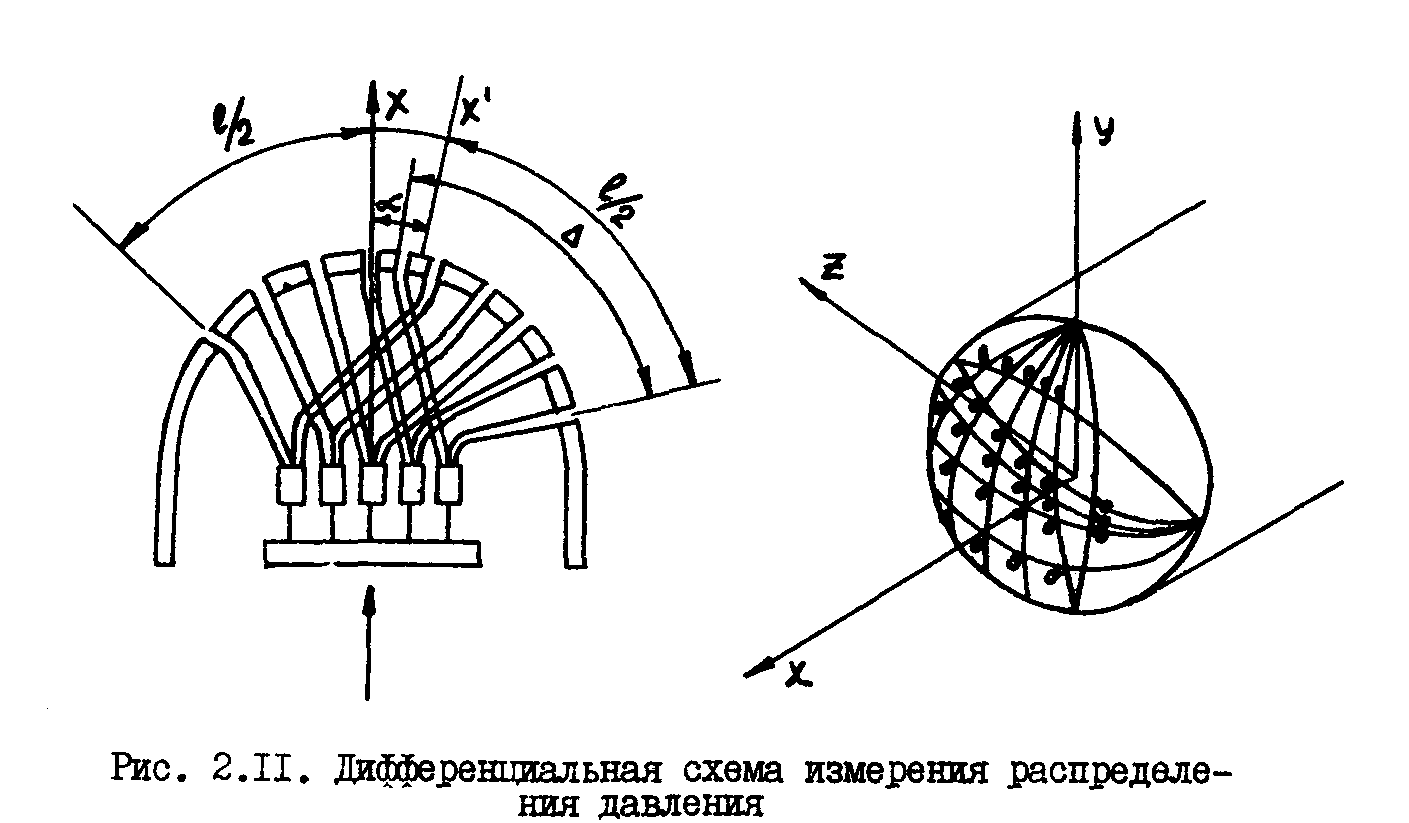
В работе [9] приводится дифференциальная схема измерения (рис. 2.11), в которой с помощью модели воспроизводится кривая распределения разности динамических давлений между точками сферической поверхности, сдвинутыми на постоянный угол l/2 . В этом случае значения углов атаки и скольжения определяются положением нулей кривых распределения. Достоинство этого метода заключается при прочих равных условиях в меньшем потребном числе датчиков давления (в два раза) и большей точности измерения.
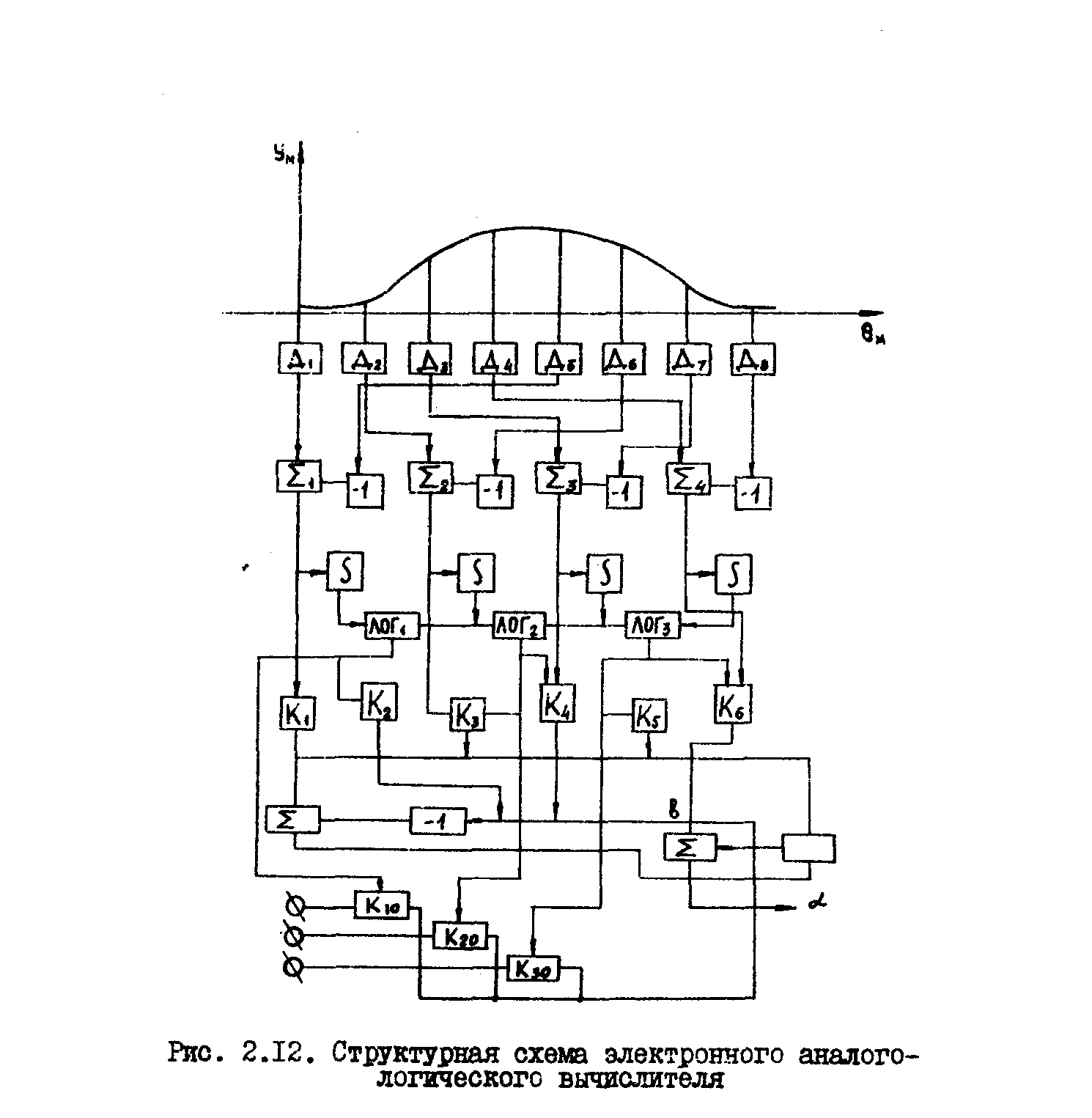
Поскольку электромеханические следящие системы, используемые в качестве "вычислителей" в рассмотренных выше случаях, имеют недостатки (наличие скользящих контактов, подвижных частей и т.п.), были разработаны электронные аналого-логические схемы вычислителей, осуществляющих на основе анализа распределения давления определение угла атаки и скольжения.
Структурная схема одного из вариантов электронного аналого-логического вычислителя показана на рис. 2.12, принцип его работы и описание других вариантов приведены в [9]. Для проектировщиков всех типов измерительных систем и вычислителей, реализующих описанный метод определения, разработаны методики выбора основных конструктивных параметров с учетом точности и диапазонов измерения углов, а также скоростного напора и ряда других факторов [5, 9].
Для измерения аэродинамических углов сферический насадок необходимо размещать на выносной штанге. Кроме того, для нормальной работы необходим обогрев сферического насадка и дифференциальных датчиков давления.