

Признаки рисков перемещения продукции вбр
|
А) Вывоз незадекларированной продукции рыболовства |
Б) Перегруз продукции рыболовства |
1. |
Для судов с закрытой границей |
|
|
недекларирование или контрабанда самостоятельным вывозом рыбопромысловым судном |
- на иностранные суда - на российское судно, следующее в иностранный порт |
2. |
Для судов с открытой границей, имеющих большие квоты на промысел |
|
|
продажа продукции в иностранных портах под видом пополнения судовых запасов |
- на иностранные суда в ИЭЗ |
3. |
Официальные экспортеры |
|
|
дополнительный промысел после декларирования продукции ВБР |
- пополнение трюмов транспорта с российских промысловых судов на пути в иностранный порт |
Следствием указанных таможенных рисков являются экономические потери.
Потери, связанные с неуплатой таможенных платежей при контрабанде и недостоверном декларировании в результате перегрузов ВБР, можно оценить, исходя из анализа таможенной статистики по группам в соответствии с товарной номенклатурой внешнеэкономической деятельности (ТН ВЭД ТС).
Весовые коэффициенты (Кi) определены нами как доли судов, участвующих в нелегальном промысле, для каждой группы товаров (i) установлены на основе метода экспертных оценок (табл. 2). Таким образом, количественная оценка потерь таможенных платежей (ТП) для N судов можно определить по (1):
ТП = N * (К0302* ТП0302 + К0303 * ТП 0303 + К0306 * ТП 0306 + К0307 * ТП 0307). (1)
Таблица 2
Средняя стоимость продукции рыболовства и таможенные платежи одного судна по группам товаров ТН ВЭД ТС
Код ТНВЭД |
Описание продукции рыболовства |
Таможенная стоимость (тыс. долл. США) Stтнвэд |
Тамож. платежи на 1 судно (тыс. руб.) ТПтнвэд |
Весовой коэффициент Kтнвэд |
Средний тоннаж
(т) |
0302 |
Рыба свежая или охлажденная, за исключением рыбного филе |
11 |
32 |
10% |
2,6 |
0303 |
Рыба мороженая, за исключением рыбного филе |
320 |
959 |
35% |
215,2 |
0304 |
Филе рыбное и прочее мясо рыбы, свежие, или мороженые |
327 |
980 |
0% |
107,8 |
0305 |
Рыба сушеная, соленая; рыба горячего или холод. копчения |
110 |
331 |
0% |
27,8 |
0306 |
Ракообразные: живые, свежие, охлажденные, мороженые и т.д. |
201 |
603 |
30% |
29,5 |
0307 |
Моллюски: живые, свежие, охлажденные, мороженые и т.д. |
37 |
112 |
25% |
11,3 |
Возврат денежных средств в государственный бюджет происходит при наложении штрафов или конфискации имущества нарушителя после вступления в действие постановления суда. С точки зрения расчета эффективности таможенного контроля необходимо рассматривать сумму штрафов, наложенную на нарушителей.
В
целях создания эффективного механизма
обнаружения рассмотренных вариантов
вывоза продукции рыболовного промысла
была разработана модель объекта
наблюдения (рыбопромыслового судна) с
точки зрения проведения автоматического
слежения и анализа поведения объекта.
Из множества характеристик судна базы
данных СМС Росрыболовства были выбраны
параметры П=(П1,
П2,…П13),
необходимые для принятия обоснованного
решения о факте нарушения таможенного
законодательства при осуществлении
удаленного таможенного наблюдения.
Например: П1
– флаг
судна; П9
– регион
деятельности, заявленный при выходе на
промысел, и т.д. В торой
составляющей информационной совокупности
объекта наблюдения является функция
состояния F,
которая отражает параметры позиционирования
судна: x,y
– координаты; v
– скорость (узлы);
–
курс. В
общем виде совокупность
информации (Оi)
i-го
объекта наблюдения описана как функция
параметров идентификации Пi
и функция параметров позиционирования
судна Fir
на момент времени tr
и
представляет математическую модель
объекта наблюдения (2):
торой
составляющей информационной совокупности
объекта наблюдения является функция
состояния F,
которая отражает параметры позиционирования
судна: x,y
– координаты; v
– скорость (узлы);
–
курс. В
общем виде совокупность
информации (Оi)
i-го
объекта наблюдения описана как функция
параметров идентификации Пi
и функция параметров позиционирования
судна Fir
на момент времени tr
и
представляет математическую модель
объекта наблюдения (2):
Оi= ƒ(Пi,Fi, tr). (2)
В
работе проведен анализ модели (2) на
чувствительность применительно к
автоматическому фиксированию двух
типовых нарушений: перегруз и самовывоз
в иностранный порт. Основные выводы:
оптимальный период фиксирования позиций
судов с точки зрения минимального
времени, необходимого для осуществления
перегруза продукции рыболовства на
другое судно в море, – 1 час; при
фиксировании нарушения «перегруз»
необходимо учитывать грузоподъемность
судов, тип продукции (живой или мороженый),
минимальное для данных типов судов
время, необходимое для осуществления
перегруза. Критерии обнаружения нарушений
связаны с попаданием координат судна
в доверительный интервал, определенный
экспертами в зависимости от типа
используемого на судне технического
средства контроля (ТСК ),
применяемого в СМС Росрыболовства для
фиксирования позиций судов.
),
применяемого в СМС Росрыболовства для
фиксирования позиций судов.
Рис. 3. Модель прогнозирования объекта А
В качестве признаков судна как «возможного нарушителя» для текущего момента наблюдения tr выделяем: область координат возможного положения судна – A в следующий момент наблюдения tr+1 (рис. 3); вектор направления (возможных координат) L с учетом курса ψr и скорости vr в момент tr+1.
Процедура предварительного выбора объектов слежения представлена двумя фильтрами. Фильтр 1 представляет суда, попадающие по ряду признаков в зону риска. Так, если основным объектом промысла судна являются крабы или моллюски. Для автоматического выбора из множества объектов наблюдения СМС объектов дальнейшего анализа используется ранее сформированная ИАС УТН база данных о предполагаемых, но не возбужденных или не доказанных нарушениях.
Для фиксирования оператором таких нарушений как пересечение границы, перегруз продукции и заход в иностранный порт ИАС, необходимо выполнять задачу прогнозирования – Фильтр 2. Так, на рис. 4 отражено судно А (с закрытой границей), в момент времени tr находящееся от берега на расстоянии L1. За время между двумя сообщениями ТСК (Т0) при максимальной скорости (vmax=П12) судно может пройти расстояние L0 (3).
L0.= Т0 * vmax (3)
М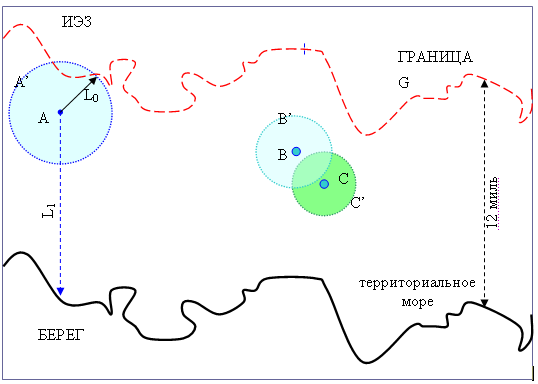 ножество
A
определяет
набор возможных позиций судна в момент
времени tr+1.
ножество
A
определяет
набор возможных позиций судна в момент
времени tr+1.
Т очка
наиболее вероятного положения судна,
с учетом курса, будет находиться на
векторе L0.
очка
наиболее вероятного положения судна,
с учетом курса, будет находиться на
векторе L0.
Рис. 4. Постановка задачи прогнозирования нарушений
Условием, при котором объект А выбирается системой для отображения в момент времени tr, является выполнение условия прогнозирования (4):
A G0 . (4)
Кроме обязательного условия (5):
ВC0 , (5)
объект В выбирается ИАС для отображения в момент времени tr при условии, что флаг второго судна не является российским. Если речь идет о перегрузе внутри территориального моря, вторичным признаком может стать признак второго судна как судна с «открытой границей» или осуществляющего легальный экспорт.
Процедура определения достоверности фиксирования нарушений при удаленном таможенном наблюдении (УТН) основана на двух этапах. Первый этап – автоматическое формирование ИАС УТН базы данных возможных нарушений и коэффициентов достоверности их фиксирования – Кдост. Коэффициенты достоверности определяются в соответствии с вероятностными оценками (табл. 3), полученными в результате статистической обработки результатов использования данных СМС в правоохранительной деятельности таможенных органов.
Таблица 3