

2.6 Исследование точности системы
Чтобы определить границу устойчивости системы воспользуемся инструментом GUI-интерфейс SISO-Design Tool из пакета прикладных программ Control System Toolbox
>> w=tf([0.00816 0.24],[0.0000017408 0.0002816 0.000576 0.0328704 0])
Transfer function:
0.00816 s + 0.24
---------------------------------------------------------
1.741e-006 s^4 + 0.0002816 s^3 + 0.000576 s^2 + 0.03287 s
>>p=zpk('p'); w=(12*0.02*(0.034*p+1))/(0.32*(0.02*0.01*0.034*0.08*p^4+0.02*0.08*p^3*(0.034+0.01)+0.02*p^2*(0.08+0.01)+(0.08*(0.034+1)+0.02)*p))
Ноль/Полюс/Увеличение:
46875 (p+29.41)
----------------------------------
p (p+114.9) (p^2 + 14.49p + 1643)
На основе нашего zpk объекта вызовем SISO-Design Tool командой Sisotool(w)
>> sisotool(w)


Рисунок 12 - Полученный корневой годограф
Передвинем красным курсором по годографу (Рисунок 12) до пересечения с мнимой осью, и определим коэффициент усиления, при котором система находится на границе устойчивости (Рисунок 13):

Рисунок 13 - Корневой годограф на границе устойчивости
В результате мы нашли коэффициент усиления, при котором наша система находится на границе устойчивости.
В нашем случае он равен 0,124

Затем мы задали значения КРС=0, 5 и КРС=0,1 (Рисунок 14, Рисунок 15) и определили значения полюсов:

 Рисунок
14 - Корневой годограф САУ, при КРС=0,5
Рисунок
14 - Корневой годограф САУ, при КРС=0,5
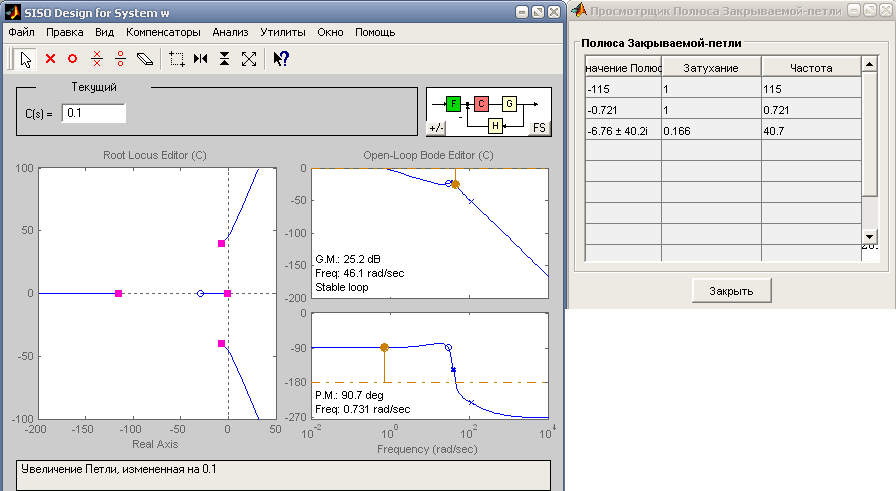
Рисунок 15 - Корневой годограф САУ, при КРС=0,1
На основе использования метода корневого годографа получили области значений коэффициента усиления, при которых система автоматического управления является устойчивой.
2.7 Расчет частотных характеристик для сау
Передаточная функция неизменяемой части объекта имеет вид:

Передаточная функция разомкнутой исходной системы имеет вид:
![]() (2.5)
(2.5)
Построим логарифмические частотные характеристики (Рисунок 16)
>> w=tf([0.00816 0.24],[0.0000017408 0.0002816 0.000576 0.0328704 0])
Transfer function:
0.00816 s + 0.24
---------------------------------------------------------
1.741e-006 s^4 + 0.0002816 s^3 + 0.000576 s^2 + 0.03287 s
>> bode(w)

Рисунок 16 - Диаграмма Боде
Чтобы построить переходную характеристику (Рисунок 17) воспользуемся командой:
>> step(w)
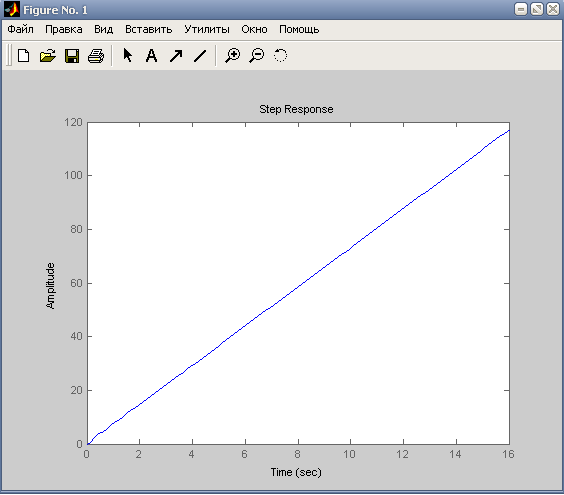
Рисунок 17 - Переходная характеристика
2.8 Выявление систематических ошибок
Передаточная функция замкнутой системы по ошибке от управления имеет вид:
 (2.8)
(2.8)
Передаточная функция замкнутой системы по ошибке от возмущения имеет вид:
 (2.9)
(2.9)
Для определения точности мы воспользовались методом систематических ошибок. Так как воздействие по каналу управления и возмущения постоянны, для определения величины εуст(t) в установившемся режиме необходимо определить коэффициенты статических ошибок по этим каналам, на основании передаточных функций ошибок, необходимо найти лишь первые коэффициенты ошибок согласно выражений:
Со=Wε(Р)|S=0
Сof=Wfε(P)|S=0
Для этого приравняли р=0, в выражениях Wε(p) и Wfε. Так как числитель этих выражений имеет множитель в виде р, то соответственно и коэффициенты ошибок Со=0; Сof=0, а соответственно ошибка
εуст(t)=Со*X(t)+Cоf*f(t)=0 (2.12)
Таким образом САУ не имеет ошибки в установившемся режиме.