

2.2 Преобразование структурной схемы
Преобразуем структурную схему (Рисунок 2) к стандартному виду, когда все звенья сосредоточены в прямом канале системы, внутренние обратные связи отсутствуют, возмущающее воздействие приложено к выходу системы, а главная обратная связь является единичной.
Используя правило последовательного соединения элементов заменим регулятор тока и тиристорный преобразователь эквивалентным звеном (Рисунок 3):
![]() (2.1)
(2.1)

Рисунок 3 - Преобразование структурной схемы 1
Затем перенесем сумматор и получим звено с обратной связью (Рисунок 4):
![]() (2.2)
(2.2)

Рисунок 4 - Преобразование структурной схемы 2

Используя правило обратной связи преобразуем схему следующим образом (Рисунок 5):

 (2.3)
(2.3)

Рисунок 5 - Преобразование структурной схемы 3
Затем перенесем сумматор и получим следующую схему (Рисунок 6):

Рисунок 6 - Преобразование структурной схемы 4
Затем опять воспользовавшись правилом обратной связи (Рисунок 7)

 (2.4)
(2.4)
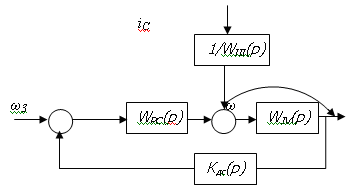
Рисунок 7 - Преобразование структурной схемы 5
Перенеся узел суммирования на выход системы, окончательно получим схему по которой можно непосредственно записать все требуемые передаточные функции (Рисунок 8):
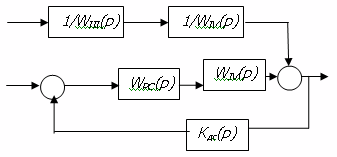
Рисунок 8 - Преобразованная схема
2.3 Синтез системы
Синтез системы автоматического управления является основной стадией проектирования, сущность которой заключается в таком выборе структуры системы, ее параметров и технической реализации, при котором обеспечиваются требуемые показатели качества регулирования.
В нашем случае корректирующим устройством является усилительное звеном КРС. Коэффициент усиления этого звена равен порядковому номеру студента:
WРС= КРС
КРС=12
2.4 Определение передаточных функций
На основе структурной схемы САУ составим следующие передаточные функции:
Передаточная функция разомкнутой системы
 (2.5)
(2.5)
Передаточная функция замкнутой системы по управлению:
 (2.6)
(2.6)
Передаточная функция замкнутой системы по возмущению:
 (2.7)
(2.7)
Передаточная функция по ошибке от управления:
 (2.8)
(2.8)
Передаточная функция по ошибке от возмущения:
 (2.9)
(2.9)
2.5 Исследование устойчивости и качества динамических режимов системы
В качестве алгебраического критерия устойчивости используем критерий Гурвица. Для определения устойчивости по данному критерию необходимо найти характеристический полином замкнутой системы.
Передаточная функция по управляющему воздействию:
![]() (2.6)
(2.6)
Из этого следует характеристический полином:
![]()
Так у нас получилось уравнение 4-го порядка, то для того, чтобы САУ была устойчива, необходима и достаточна положительность всех коэффициентов матрицы Гурвица (Рисунок 10), а также положительное значение определителя 4-го порядка.

Рисунок 10 - Матрица 4-го порядка
Из данной матрицы следует:
 (2.10)
(2.10)
Можно сделать вывод о том что САУ не устойчива (определитель 4-го порядка отрицателен).
 В
качестве частотного критерия устойчивости
задан критерий Найквиста. Для анализа
САУ необходимо использовать передаточную
функцию системы в разомкнутом состоянии.
В
качестве частотного критерия устойчивости
задан критерий Найквиста. Для анализа
САУ необходимо использовать передаточную
функцию системы в разомкнутом состоянии.
![]() (2.5)
(2.5)
Для начала создали LTI-объект с именем w, в командном режиме среды MATLAB:
>> w=tf([0.00816 0.24],[0.0000017408 0.0002816 0.000576 0.0328704 0])
Transfer function:
0.00816 s + 0.24
---------------------------------------------------------
1.741e-006 s^4 + 0.0002816 s^3 + 0.000576 s^2 + 0.03287 s
После чего определили нули функции:
>> zero(w)
ans =
-29.4118
Все «нули» данной передаточной функции отрицательны, следовательно САУ в разомкнутом состоянии устойчива.
Для того, чтобы замкнутая система была устойчива необходимо и достаточно, чтобы амплитудно-фазовая характеристика разомкнутой системы не охватывала точку (-1, 0). Построили критерий Найквиста (Рисунок 11).
>> nyquist(w)


Рисунок 11 - Годограф Найквиста
Годограф охватывает точку (-1, 0), следовательно система не устойчива (Рисунок 11).