Расчет точности физического сборочного параметра (практическое занятие №2)
по ТТ qотк=1+ 0,1 Мпа
T
P
W
d
открытия
D0 =18+0,2мм клапана
d
q
![]()
![]()
![]() мм
мм
i=4+0,1 витка
1.Найти функциональную связь между
искомым физ.парам.и др. величинам на него x=f(z1,z2,...zn)
2.Определить величины полей рассеивания
wz1,wz2,...wzn,если они неизвестны.
Tz1,Tz2,...Tzn (из чертежей,из справочника)
Тогда поле рассеивания будет равно :
Wx=
![]() +
+![]() +...+
+...+
![]()
Q-внешнее усиление дей-щей на клапан;Q=P
Q=![]() =0,85d2=P
=0,85d2=P
1 .
q=
.
q=![]() q=f (p,d)
q=f (p,d)
Wq=
![]() +
+
![]()
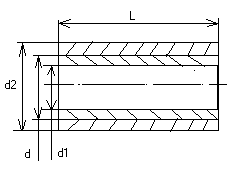
Обратимся к теории упругости:
P=
G-модуль упругости
dп – диаметр проволоки
D0-сред.диаметр пружины
![]()
i-кол-во рабочих витков пружины
L-деформация пружины .
P=f(L,G,dп,D0,i)
WP=![]()

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
![]()
Сборка соединения с гарантирующим натягом. Прессовые соединения.
Такие соединения можно встретить при установке стальных и бронзовых втулок скользящих подшипников, внутренних колец шарико- и ролико-подшипника, диски, оси, штифты, установленные с натягом.
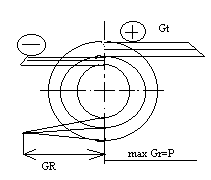
![]() t
=f1(N)
R=f2(N)
R=f2(Gt)
t
=f1(N)
R=f2(N)
R=f2(Gt)
N=dв-d0>0 t – окружность напряжения
R- радиальная напряжения
E1,E2 - модуль упругости охватываемой и охватывающей установки
C1,C2 – коэффициенты упругих свойств детали.
 -M1
;
-M1
;
Коэффициент Пуассона для стали M=0,3
Требования предъявляемые к прессовым соединениям:
1.Fтр![]() Pос,
Mтр
Mкр
Pос,
Mтр
Mкр
2.Прочность материала детали.
t<[ ] P1уд < max P1уд
P2уд maxP2уд
max
P1уд =0,58
1T
[![]() ]
]
max
P2уд
= 0,58
2T
[![]() ]
]
1T , 2T – пределы текучести для материала детали.
Практически второе требование выполняется за счет ограничения max величины натяга. Первое требование достигается за счёт выбора оптим.
cпособа сборки соединения.
В производстве часто используется два способа сборки:
1.Механическая сборка (силовая запрессовка).
2.Тепловая сборка (с нагревом охватывающей и охлаждением охватываемой).
Механическая сборка или силовая запрессовка.
P3= Fтр=f3πdLPуд
f3 – коэффициент трения при запрессовке.
Pуд – удельное напряжение на контактной поверхности.
f3 - зависит от рода материала , вида гальванического покрытия,смазки.
Некоторые виды смазки:MoS2.
В процессе механической сборки различают 2 вида натяга:
1 – иэмеренный натяг,N измерений , которые определяются измерениями до сборки.
2 – действительный , после сборки соединения.
Nд = Nизм – 1,2(Rz1+Rz2) ; Nизм = 30 ; Nд = 30 – 1,2(10+10) = 6 мкм;
Rz =6 мкм ; Nд = 30 – 1,2(1,6+1,6)=26 мкм .
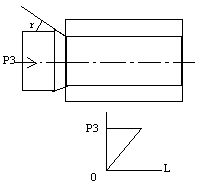
Силовая запрессовка может быть назначена при малой шероховатости поверхности сопрягаемой поверхности.
1.Угол заходного конуса ropt=100-150
2.Скорость запрессовки. Если скорость увеличивать, то силы требуется меньше. Появляется пласт деформации на поверхности детали, скорость не более 5 мм/с.
3.Схема приложения усилия:
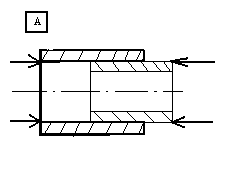
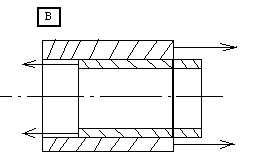
толкающее тянущее
Силовая запрессовка может проводиться как в ручную, так и с помощью пресса ручного(винтовые, реечные 1000 кг),пневматические прсса (10–20 т).
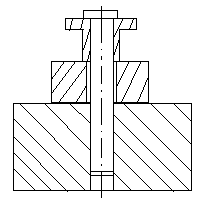
Во всех случаях необходимо исключать перекос сопрягаемых деталей за счет
Технологической оснастки.
Оправка
втулка
корпус
корпус