

Общие сведения об элементах схемы авторулевого
1. Общие сведения
Схемы авторулевых устройств, предназначены для создания сигналов, передаваемых на исполнительные механизмы в случае отклонения движения судна от задаваемого курса. Авторулевые состоят из различных блоков, выполняющие специализированные функции.
Устройство, называемое датчиком курса (ДК), вырабатывает сигнал, пропорциональный углу рассогласования судна по курсу
U1= a1 (1)
Блоки коррекции БК, применяемые в авторулевых типа Аист, Печора, предназначены для выработки сигналов, пропорциональных:
− скорости ухода судна с курса:
U2 = a2/t; (2)
− интегралу от угла отклонения судна от заданного курса:
U3 = a3t. (3)
В современных авторулевых используется так называемый пропорционально-интегрально-дифференциальный (ПИД) закон управления:
U= U1+ U2 + U3 = a1 a2/t + a3t. (4)
Основные технические данные БК:
− питание от источника переменного напряжения 20 В, частотой 50 Гц; это питание обеспечивает питание эталонного сигнала частотой 50 Гц, поступающее на модуляторы и демодуляторы;
– от этого источника получается выпрямленное постоянное напряжение для питания коллекторных цепей биполярных транзисторов
− чувствительность блока БК – не ниже 40 мВ;
− при входном сигнале 40 мВ и нагрузке 10 кОм максимальное выходное напряжение должно быть (2,0 ± 0,4) В;
− при изменении входного напряжения от 40 до 400 мВ скачок выходного напряжения должен быть не менее 2,2 В.
Схема БК приведена на рис. 1. БК состоит из электронного дифференцирующего (ЭДУ) и интегрирующего (ЭИУ) устройств, каждый их которых включает в себя УПТ и регулируемый ограничитель (РО) выходного напряжения.
На входе УПТ дифференцирующего устройства ЭДУ включена емкость С, поэтому на выходе ДУ сигнал появляется только в том случае, если есть изменение величины входного сигнала. Следовательно, на выходе ДЭ сигнал пропорционален скорости ухода судна с курса.
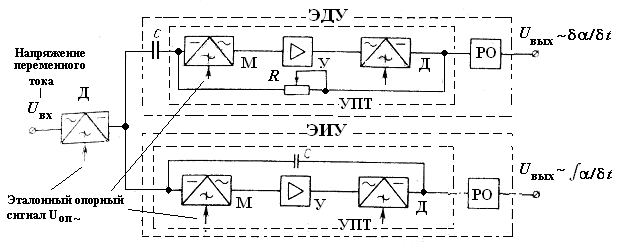
Рис. 1. Блок-схема блока коррекции
В ИУ емкость С включена в цепь обратной связи УПТ. Фактически мы имеем интегратор, так что при появлении на входе сигнала постоянной амплитуды выходное напряжение будет изменяться по экспоненциальному закону. В связи с эти можно считать, что на выходе УПТ напряжение пропорционально интегралу от входной величины, т.е. интегралу от угла отклонения судна от курса.
2. Состав усилителя постоянного тока
Схема (рис. 1) усилителя постоянного тока (УПТ), включенного в состав ЭДУ и ЭИУ, включает в себя модулятор (М), усилитель (У) переменного тока и демодулятора (Д).
УПТ (рис. 1) выполнен по схеме модуляции-демодуляции, т.е. входной сигнал постоянного тока претерпевает изменения:
– преобразуется при помощи модулятора в сигнал переменного тока;
– усиливается усилителем переменного тока;
– преобразуется в сигнал постоянного тока при помощи демодулятора.