


Министерство образования и науки Российской Федерации
Старооскольский технологический институт им. А.А. Угарова
(филиал) федерального государственного автономного
образовательного учреждения высшего профессионального образования
«Национальный исследовательский технологический университет «МИСиС» (СТИ НИТУ «МИСиС»)
Оскольский политехнический колледж»

Курсовой проект
по дисциплине
«Элементы систем автоматики»
Специальность 230103
Тема: Расчет системы автоматического управления электроприводом по заданным параметрам
Вариант 18
Студент Милютин А.П.
Руководитель Трубицына О.В.
2013
Содержание
Введение……………………………………………………………………………………………………………..
1. Теоретическая Часть. Структурные схемы САУ………………………………….
1.1 Основные типы соединений……………………………………
1.2 . Правила преобразования структурных схем линейных систем……
1.3 Вычисление передаточной функции одноконтурной системы…………
1.4 Вычисление передаточной функции многоконтурной системы………
2.Специальная часть………………………………………………………………………………………..
2.1. Описание исследуемой системы и ее характеристики……………………
2.2. Синтез системы и определение передаточных функций……………….
2.3. Исследование устойчивости и качества динамических режимов систем………………………………………………………………………………………………………………….
2.4 Исследование точности системы…………………………………………………………..
2.5.Выявление систематических ошибок……………………………………………………..
2.6 Конструктивные расчеты регулятора скорости…………………………….
3. Охрана труда. Пожарная связь и сигнализация………………………………….
Заключение…………………………………………………………………………………………………………
Список используемых источников………………………………………………………………..
Введение
Принцип действия любой системы автоматического регулирования (САР) состоит в том, чтобы обнаружить отклонение регулируемых величин, характеризующих работу машины, или протекание процесса от требуемого режима, и при этом воздействовать на машину или процесс так, чтобы устранить возникшие отклонения.
Задача разработки САР состоит в том, чтобы на основании некоторых априорных сведений об объекте и заданным техническим требованиям к системе в целом, выбрать соответствующую элементную базу и составить схему системы, обеспечивающую реализацию этих требований.
В качестве основного метода в работе исследования используется метод логарифмических частотных характеристик, который отличается простотой, наглядностью и приводит к легко обозримым результатам. Это позволяет применить его наряду с методами, основанными на использовании вычислительной техники, которые тоже используются в ходе выполнения работ.
Кроме такого подхода, метод переменных вход-выход (передаточные функции - частотные характеристики), существует множество других методов, в частности метод переменных состояния, особенностью которого является управляемость и наблюдаемость, метод аналитического конструирования регуляторов.
Сложность современных автоматических систем значительно возросла. Если в период частичной автоматизации они обычно состояли из отдельных САР, взаимная координация действий которых осуществлялась человеком, то теперь возникла необходимость в автоматической координации их действий и, следовательно, в создании сложных взаимосвязанных и многоуровневых систем автоматического управления (САУ).
Более передовые объекты управления нашего времени требуют применения нечеткой логики при конструировании систем управления, что также требует создания и освоения более сложных методов исследовании и проектирования.
Однако, основные понятия, принципы, задачи и методы автоматического регулирования сохраняют свою актуальность и получают дальнейшее развитие в современных теориях и подходах к проектированию сложных автоматизированных систем, расчет которых немыслим без вычислительной техники.
Целью данной работы является изучение и самостоятельное применение основных положений классической теории автоматического управления в решении задачи электропривода - анализе системы автоматизированного электропривода постоянного тока и синтезе последовательного корректирующего устройства.
Курсовой проект ставит следующие задачи: описание объекта регулирования, анализ непрерывной системы, исследование устойчивости.
Программное обеспечение к курсовой работе представляет собой моделирующий комплекс Experiment, обеспечивающий расчет реакции системы на типовые управляющие или возмущающие сигналы. Дублирующей средой модулирования является универсальный пакет MATLAB.

 1.
Теоретическая Часть.
1.
Теоретическая Часть.
Структурные схемы САУ
1.1 Основные типы соединений
Структурная схема – это графическое представление математической модели системы в виде соединений звеньев, условно обозначаемых в виде прямоугольника с указанием входной и выходной величин и передаточных функций. Обозначение передаточной функции записывают, как правило, внутри прямоугольника.
Суммирующие звенья изображаются в виде круга, разделенного на секторы. Сектор, на который подается величина с обратным (отрицательным) знаком, затемняют или перед соответствующим входом ставят знак минус.
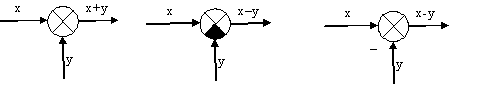
а б в
Рисунок 1 – Схемы суммирующих звеньев
Звено – это устройство любого физического вида и конструктивного оформления, но описанное определенным дифференциальным уравнением. Звено – математическая модель любой части САУ.
Математическая модель – это описание каких-либо явлений, процессов с помощью математической символики.
Математическое моделирование – изучение явлений с помощью математических моделей процессов.
При математическом описании систему обычно изображают в виде функциональной схемы. Для каждого блока составляют уравнение, которым описываются процессы. Затем строится структурная схема.
 Преобразования,
необходимые для получения уравнений и
передаточных функций системы, проще и
нагляднее производить по структурным
схемам. Звено структурной схемы
необязательно изображает модель
какого–либо
элемента. Оно может быть моделью элемента,
соединения элементов или вообще любой
частью системы.
Преобразования,
необходимые для получения уравнений и
передаточных функций системы, проще и
нагляднее производить по структурным
схемам. Звено структурной схемы
необязательно изображает модель
какого–либо
элемента. Оно может быть моделью элемента,
соединения элементов или вообще любой
частью системы.
Основные типы соединений:
Последовательное соединение звеньев – это соединение, при котором выходная величина предшествующего звена является входной величиной последующего звена.

Рисунок 2 – Последовательное соединение звеньев
При преобразовании цепочку из последовательно соединенных звеньев, заменяют одним звеном с передаточной функцией равной произведению передаточных функций отдельных звеньев.
2)Параллельное соединение звеньев – это соединение, при котором на вход всех звеньев подается одно и то же воздействие, а выходные величины складываются.


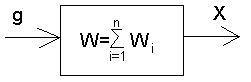
Рисунок 3 – Параллельное соединение звеньев
Цепь из параллельно соединенных звеньев можно заменить одним звеном с передаточной функцией, равной сумме передаточных функций входящих в нее звеньев.
3) Обратное соединение звеньев – это соединение, при котором звено охвачено обратной связью, а именно, выходной сигнал одного звена через какое-либо другое звено подается на вход первого.

Рисунок 4 – Обратное соединение звеньев
Участок
цепи от точки приложения входного
воздействия g
до точки съёма выходного сигнала
 (в направлении распределения сигнала)
называется прямой цепью.
(в направлении распределения сигнала)
называется прямой цепью.
Участок
цепи от точки съема выходного сигнала
до сумматора
 называется обратной связью.
называется обратной связью.
 – передаточная
функция прямой цепи.
– передаточная
функция прямой цепи.
 -
передаточная функция обратной связи
(ОС).
-
передаточная функция обратной связи
(ОС).
Если
сигнал обратной связи
вычитается из входного воздействия
 ,
то обратная связь называется отрицательной
обратной связью.
,
то обратная связь называется отрицательной
обратной связью.
Если
сигнал обратной связи
складывается со входным воздействием
 ,
то обратная связь называется положительной
обратной связью.
,
то обратная связь называется положительной
обратной связью.
 Если
передаточная функция обратной связи
Если
передаточная функция обратной связи
 ,
то обратная связь называется единичной
,
то обратная связь называется единичной

Рисунок 5 – Обратное соединение звеньев с единичной отрицательной обратной связью
При размыкании замкнутой цепи сразу после сумматора получается цепь из 2-х последовательно соединенных звеньев.

Рисунок 6 - Цепь из 2-х последовательно соединенных звеньев.
Ее
передаточная функция, равная
 называется передаточной функцией
разомкнутой цепи (системы).
называется передаточной функцией
разомкнутой цепи (системы).
Передаточная
функция звена, охваченного обратной
связью, равна передаточной функции
 ,
где плюс в знаменателе правой части
берется при отрицательной обратной
связи, минус –
при положительной.
,
где плюс в знаменателе правой части
берется при отрицательной обратной
связи, минус –
при положительной.
 2.2
Правила преобразования структурных
схем линейных систем
2.2
Правила преобразования структурных
схем линейных систем
При преобразовании структурных схем возникает необходимость переноса сумматоров и узлов схем.
Перенос сумматора.
При переносе сумматора по ходу сигнала добавляется звено с передаточной функцией, равной передаточной функции звена, через которое переносится сумматор.


Рисунок 7 - Перенос сумматора по ходу сигнала
 При
переносе сумматора против хода сигнала
добавляется звено с передаточной
функцией, равной обратной передаточной
функции звена, через которое переносится
сумматор.
При
переносе сумматора против хода сигнала
добавляется звено с передаточной
функцией, равной обратной передаточной
функции звена, через которое переносится
сумматор.
При переносе сумматора возникают неэквивалентные участки цепи, поэтому нельзя переносить сумматор через точку съема сигнала.
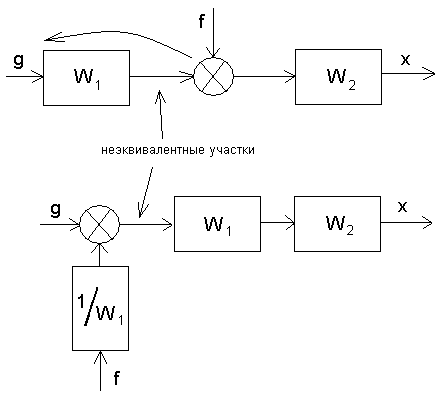
Рисунок 8 - Перенос сумматора против хода сигнала
Перенос узла.
При переносе узла по ходу сигнала добавляется звено с передаточной функцией, равной обратной передаточной функции звена, через которое переносится узел.
При переносе узла против хода сигнала добавляется звено с передаточной функцией, равной передаточной функции звена, через которое переносится узел.
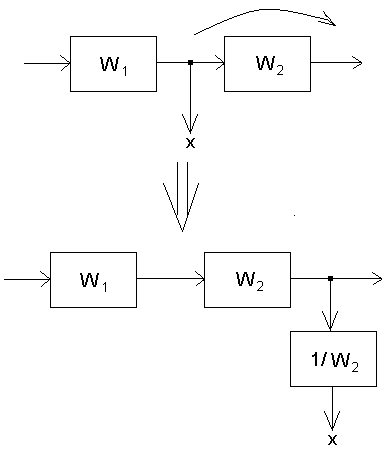

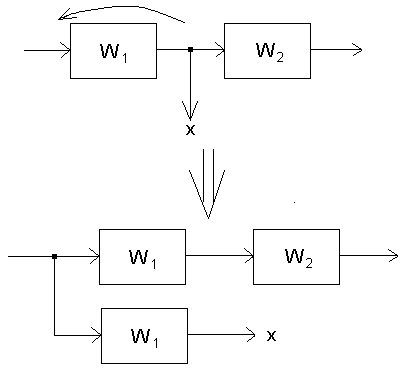
Рисунок 9 - Перенос узла против хода сигнала
Перестановка узлов. Узлы можно переставлять местами

Рисунок 10 - Перестановка узлов
Перестановка сумматоров. Сумматоры можно менять местами, но при этом участки между сумматорами не являются эквивалентными.


Рисунок 11 - Перестановка сумматоров
При переносе узла через сумматор добавляется сравнивающее звено.



Рисунок 11 - Перенос узла через сумматор
 При
переносе сумматора через узел добавляется
суммирующее звено.
При
переносе сумматора через узел добавляется
суммирующее звено.


Рисунок 11 – Перенос сумматора через узел