

13. Некоторые частные случаи движения точки
Пользуясь полученными результатами, исследуем зависимость значений ее нормального и касательного ускорений от характера движения точки.
При равномерном
движении, когда
численное значение скорости ![]() постоянно,
касательное ускорение
постоянно,
касательное ускорение ![]() обращается
в нуль. Оно отлично от нуля только при
неравномерном движении и
поэтому характеризует изменение скорости
по величине.
обращается
в нуль. Оно отлично от нуля только при
неравномерном движении и
поэтому характеризует изменение скорости
по величине.
При прямолинейном движении,
когда радиус кривизны траектории ![]() равен
бесконечности, нормальное ускорение
обращается в нуль. Оно отлично от нуля
только при
криволинейном движении и,
следовательно, характеризует изменение
скорости по направлению.
равен
бесконечности, нормальное ускорение
обращается в нуль. Оно отлично от нуля
только при
криволинейном движении и,
следовательно, характеризует изменение
скорости по направлению.
Обе составляющие ускорения обращаются в нуль только при равномерном и прямолинейном движении.
Неравномерное движение
точки называется ускоренным,
если модуль скорости возрастает, и
замедленным - в противоположном случае.
Легко доказать, что движение является
ускоренным, если знаки величин ![]() и
и  одинаковы,
и замедленным, если эти знаки различны.
При ускоренном движении вектор
касательного ускорения направлен в ту
же сторону, что и скорость, при замедленном
- в противоположную сторону.
одинаковы,
и замедленным, если эти знаки различны.
При ускоренном движении вектор
касательного ускорения направлен в ту
же сторону, что и скорость, при замедленном
- в противоположную сторону.
Движение называется равнопеременным в том случае, если касательное
ускорение постоянно, т. е.
![]() , (2.24)
, (2.24)
откуда
![]() .
.
Интегрируя последнее
выражение и имея в виду, что при ![]()
![]() ,
получим
,
получим
![]() . (2.25)
. (2.25)
Формула (2.25) определяет
скорость равнопеременного движения.
Подставляем в нее значение
.
Интегрируя и имея в виду, что при
![]() ,
получим
,
получим
 . (2.26)
. (2.26)
Выражение (2.26) называют уравнением равнопеременного движения точки по траектории.
14. Поступательное движение твердого тела – это движение, при котором любая прямая, связанная с телом, при его движении остается параллельной своему начальному положению.
Примеры поступательного движения: движение педалей велосипеда относительно его рамы, движение поршней в цилиндрах двигателя внутреннего сгорания относительно цилиндров, движение кабин колеса обозрения относительно Земли (рисунок 1.1) и т.д.

Рис. 1.1
Теорема. При поступательном движении твердого тела траектории, скорости и ускорения точек тела одинаковы.
Доказательство.
Если выбрать две точки твердого тела А и В (рисунок 1.2), то радиусы-векторы этих точек связаны соотношением
![]()
Траектория точки А – это кривая, которая задается функцией rA(t), а траектория точки B – это кривая, которая задается функцией rB(t). Траектория точки B получается переносом траектории точки A в пространстве вдоль вектора AB, который не меняет своей величины и направления во времени (AB = const). Следовательно, траектории всех точек твердого тела одинаковы.
Продифференцируем по времени выражение
Получаем

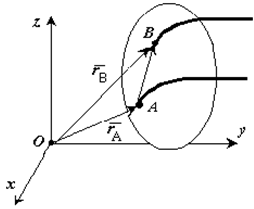
Рис. 1.2
Продифференцируем по времени скорость и получим выражение aB = aA. Следовательно, скорости и ускорения всех точек твердого тела одинаковы.
Для задания поступательного движения твердого тела достаточно задать движение одной из его точек:

15. Вращательное движение тела в зависимости от времени t характеризуют угловые величины: φ (угол поворота в радианах), ω (угловая скорость в рад/сек) и ε (угловое ускорение в рад/сек2).
Закон вращательного движения тела выражается уравнением φ = f (t).
Угловая скорость – величина, характеризующая быстроту вращения тела, определяется в общем случае как производная угла поворота по времени ω = dφ/dt = f' (t).
Угловое ускорение – величина, характеризующая быстроту изменения угловой скорости, определяется как производная угловой скорости ε = dω/dt = f'' (t).
Приступая к решению задач на вращательное движение тела, необходимо иметь в виду, что в технических расчетах и задачах, как правило, угловое перемещение выражается не в радианах φ, а в оборотах φоб.
Поэтому необходимо уметь переходить от числа оборотов к радианному измерению углового перемещения и наоборот.
Так как один полный оборот соответствует 2π рад, то φ = 2πφоб и φоб = φ/(2π).
Угловая скорость в технических расчетах очень часто измеряется в оборотах, произведенных в одну минуту (об/мин), поэтому необходимо отчетливо уяснить, что ω рад/сек и n об/мин выражают одно и то же понятие – скорость вращения тела (угловую скорость), но в различных единицах – в рад/сек или в об/мин.
Переход от одних единиц угловой скорости к другим производится по формулам ω = πn/30 и n = 30ω/π.

При вращательном движении тела все его точки движутся по окружностям, центры которых расположены на одной неподвижной прямой (ось вращающегося тела). Очень важно при решении задач, приведенных в этой главе, ясно представлять зависимость между угловыми величинами φ, ω и ε, характеризующими вращательное движение тела, и линейными величинами s, v, at и an, характеризующими движение различных точек этого тела (рис 205).
Если R – расстояние от геометрической оси вращающегося тела до какой-либо точки А (на рис. 205 R=OA), то зависимость между φ – углом поворота тела и s – расстоянием, пройденным точкой тела за то же время, выражается так: s = φR.
Зависимость между угловой скоростью тела и скоростью точки в каждый данный момент выражается равенством v = ωR.
Касательное ускорение точки зависит от углового ускорения и определяется формулой at = εR.
Нормальное ускорение точки зависит от угловой скорости тела и определяется зависимостью an = ω2R.
При решении задачи, приведенной в этой главе, необходимо ясно понимать, что вращением называется движение твердого тела, а не точки. Отдельно взятая материальная точка не вращается, а движется по окружности – совершает криволинейное движение.
Равномерное вращательное движение
Если угловая скорость ω=const, то вращательное движение называется равномерным.
Уравнение равномерного вращения имеет вид φ = φ0 + ωt.
В частном случае, когда начальный угол поворота φ0=0, φ = ωt.
Угловую скорость равномерно вращающегося тела ω = φ/t можно выразить и так: ω = 2π/T, где T – период вращения тела; φ=2π – угол поворота за один период.
Равнопеременное вращательное движение
Вращательное движение с переменной угловой скоростью называется неравномерным (см. ниже § 35). Если же угловое ускорение ε=const, то вращательное движение называется равнопеременным. Таким образом, равнопеременное вращение тела – частный случай неравномерного вращательного движения.
Уравнение равнопеременного вращения (1)φ = φ0 + ω0t + εt2/2 и уравнение, выражающее угловую скорость тела в любой момент времени, (2)ω = ω0 + εt представляют совокупность основных формул вращательного равнопеременного движения тела.
В эти формулы входят всего шесть величин: три постоянных для данной задачи φ0, ω0 и ε и три переменных φ, ω и t. Следовательно, в условии каждой задачи на равнопеременное вращение должно содержаться не менее четырех заданных величин.
Для удобства решения некоторых задач из уравнений (1) и (2) можно получить еще две вспомогательные формулы.
Исключим из (1) и (2) угловое ускорение ε: (3)φ = φ0 + (ω + ω0)t/2.
Исключим из (1) и (2) время t: (4)φ = φ0 + (ω2 - ω02)/(2ε).
В частном случае равноускоренного вращения, начавшегося из состояния покоя, φ0=0 и ω0=0. Поэтому приведенные выше основные и вспомогательные формулы принимают такой вид: (5)φ = εt2/2; (6)ω = εt; (7)φ = ωt/2; (8)φ = ω2/(2ε).