

1. Аксиомы (законы) статики: 1) аксиома инерции: Под действием взаимно уравновешивающихся сил материальная точка (тело) находится в состоянии покоя или движется прямолинейно и равномерно.
2) аксиома равновесия двух сил: Две силы, приложенные к абсолютно твердому телу, будут уравновешены тогда и только тогда, когда они равны по модулю, действуют по одной прямой и направлены в противоположные стороны.
3) аксиома присоединения и исключения уравновешивающихся сил: Действие системы сил на абс. твердое тело не изменится, если к ней прибавить или отнять уравновешенную систему сил. Следствие: Действие силы на абс.тв. тело не изменится, если перенести точку приложения силы вдоль ее линии действия. Т.е. сила, приложенная к абс.тв. телу– скользящий вектор.
4) аксиома параллелограмма сил: Равнодействующая двух пересекающихся сил приложена в точке их пересечения и изображается диагональю параллелограмма, построенного на этих силах.
5) аксиома равенства действия и противодействия (3-й закон Ньютона): Всякому действию соответствует равное и противоположно направленное противодействие.
6) принцип отвердевания: Равновесие сил, приложенных к нетвердому телу, не нарушается при его затвердевании.
Абсолю́тно твёрдое те́ло — второй опорный объект механики наряду с материальной точкой. Механика абсолютно твёрдого тела полностью сводима к механике материальных точек (с наложенными связями), но имеет собственное содержание (полезные понятия и соотношения, которые могут быть сформулированы в рамках модели абсолютно твёрдого тела), представляющее большой теоретический и практический интерес.
2. Связи
и реакции связей
Тело
называется свободным, если его
перемещение в пространстве ничем не
ограничено. В противном случае тело
называется несвободным, а тела,
ограничивающие перемещения данного
тела, ¾ связями. Силы, с которыми
связи действуют на данное тело,
называются реакциями связей.
Основные
виды связей и их реакции:
1.  Гладкая
поверхность (без трения):
Гладкая
поверхность (без трения):
Реакция
гладкой поверхности направлена по
нормали к этой поверхности (перпендикулярна
общей касательной).
2.  Опорная
точка (ребро):Реакция перпендикулярна
опирающейся поверхности.
Опорная
точка (ребро):Реакция перпендикулярна
опирающейся поверхности.
3. Идеальная
нить (гибкая, невесомая,
нерастяжимая):
 Примеры:
моделирует трос, канат, цепь,
ремень,…
Реакция идеальной нити
направлена по нити к точке подвеса.
Примеры:
моделирует трос, канат, цепь,
ремень,…
Реакция идеальной нити
направлена по нити к точке подвеса.
4. Идеальный стержень (жесткий, невесомый стержень, на концах которого шарниры):
|
|
|
|

Реакция связи направлена по стержню. В отличие от нити стержень может работать и на сжатие.
5. Цилиндрический шарнир: Такая связь позволяет телу перемещаться вдоль оси, поворачиваться вокруг оси шарнира, но не позволяет точке закрепления перемещаться в плоскости, перпендикулярной оси шарнира. Реакция лежит в плоскости, перпендикулярной оси шарнира, и проходит через нее. Положение этой реакции не определено, но она может быть представлена двумя взаимно перпендикулярными составляющими
|
|
|
|
|
|
|
|
||
|
|
|
||
|
|
|
||

6. Сферический шарнир: Такая связь не дает точке закрепления тела перемещаться ни в одном из направлений. Положение реакции не определено, но она может быть представлена тремя взаимно перпендикулярными составляющими.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|


7. Подпятник:
 Реакция
данной связи задается аналогично
предыдущему случаю.
Реакция
данной связи задается аналогично
предыдущему случаю.
8. Жесткая заделка: Такая связь препятствует перемещению и повороту вокруг точки закрепления. Контакт тела со связью осуществляется по поверхности. Имеем распределенную систему сил реакции, которая, как будет показано, может быть заменена одной силой и парой сил.
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|||
|
|
|
|
|||
|
|
|
|
|||
|
|
|
|
|
||



Аксиома освобождаемости от связей: Всякое несвободное тело можно считать свободным, если мысленно освободиться от связей, а их действие заменить соответствующими реакциями.
3. Проекция силы на ось
Проекция силы на ось – это алгебраическая величина, равная произведению модуля силы на косинус угла между положительным направлением оси и вектором силы (т.е. это отрезок, откладываемый силой на соответствующие оси. Рисунок 1.13):
Fx= Fcosα;
Px= Pcosβ= P⋅ cos90o=0;
Rx= Rcosγ = -R⋅ cos(180o-γ).
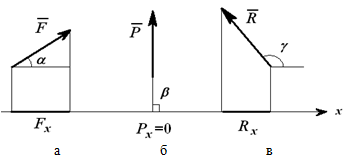
Рисунок 1.13
Проекция силы на ось может быть положительной, рис. 1.13а (0 ≤ α < π/2), равной нулю, рис. 1.13б (β = π/2 ) и отрицательной, рис. 1.13в (π/2 < γ ≤ π).
Иногда для нахождения проекции силы на ось сначала нужно найти ее проекцию на плоскость, а потом проекцию на ось (рисунок 1.14):
Pz= P sinα;
Px= (P cosα)cosβ;
Py= (P cosα)cosγ = P cosα⋅ cos(90o-β).
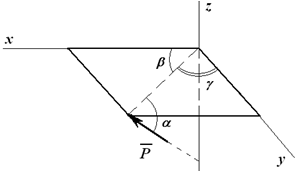
Рисунок 1.14
4. Сосредоточенными считаются силы, приложенные к малой поверхности, размеры которой малы по сравнению с размерами тела. Однако при расчете напряжений вблизи зоны приложения силы нагрузку следует считать распределенной. К сосредоточенным нагрузкам относят не только сосредоточенные силы, но и пары сил, примером которых можно считать нагрузку, создаваемую гаечным ключом при закручивании гайки. Сосредоточенные усилия измеряются в кН.
Распределенные нагрузки бывают распределенными по длине и по площади . К распределенным нагрузкам относят давление жидкости, газа или другого тела. Распределенные силы измеряются, как правило, в кН/м (распределенные по длине) и кН/м2 (распределенные по площади).
ИНТЕНСИВНОСТЬ НАГРУЗКИ нагрузка, приходящаяся на единицу нагруженной площади или длины
5.Сложение сходящихся сил. Система сил, линии действия которых пересекаются в одной точке,
называется системой с х о д я щ и х с я с и л.
Сложить две или несколько сил - это значит заменить эти силы одной силой, им эквивалентной, т.е.
найти их равнодействующую.
![]()
![]()

Из![]() ADC:
ADC:![]() т.к.
т.к.![]()
Разложить силу — значит найти ее составляющие. Две равные силы, направленные по одной прямой в противоположные стороны, взаимно уравновешиваются, тело при действии этих сил находится в равновесии, т. е. в состоянии покоя.
6. Момент силы относительно центра (или точки).
Опыт показывает, что под действием силы твердое тело может наряду с поступательным перемещением совершать вращение вокруг того или иного центра. Вращательный эффект силы характеризуется ее моментом
Рассмотрим
силу ![]() ,
приложенную в точке А твердого
тела (рис. 20). Допустим, что сила стремится
повернуть тело вокруг центра О.
Перпендикуляр h,
опущенный из центра O на
линию действия силы
,
называется плечом силы
относительно
центра О.
Так как точку приложения силы можно
произвольно перемещать вдоль линии
действия, то, очевидно, вращательный
эффект силы будет зависеть: 1) от модуля
силы F и
длины плеча h;
2) от положения плоскости поворота ОАВ,
проходящей через центр О и
силу F;
3) от направления поворота к этой
плоскости.
,
приложенную в точке А твердого
тела (рис. 20). Допустим, что сила стремится
повернуть тело вокруг центра О.
Перпендикуляр h,
опущенный из центра O на
линию действия силы
,
называется плечом силы
относительно
центра О.
Так как точку приложения силы можно
произвольно перемещать вдоль линии
действия, то, очевидно, вращательный
эффект силы будет зависеть: 1) от модуля
силы F и
длины плеча h;
2) от положения плоскости поворота ОАВ,
проходящей через центр О и
силу F;
3) от направления поворота к этой
плоскости.
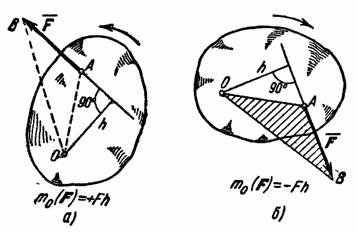
Рис.20
Ограничимся пока рассмотрением систем сил, лежащих в одной плоскости. В этом случае плоскость поворота для всех сил является общей и в дополнительном задании не нуждается.
Тогда для количественного измерения вращательного эффекта можно ввести следующее понятие о моменте силы: моментом силы относительно центра О называется величина, равная взятому с соответствующим знаком произведению модуля силы на длину плеча.
Момент силы относительно центра О будем обозначать символом m0(F). Следовательно,
![]()
В дальнейшем условимся считать, что момент имеет знак плюс, если сила стремится повернуть тело вокруг центра О против хода часовой стрелки, и знак минус, - если по ходу часовой стрелки. Так, для силы , изображенной на рис.20,а, момент относительно центра О имеет знак плюс, а для силы, показанной на рис.20,б, - знак минус.
Отметим следующие свойства момента силы:
1) Момент силы не изменяется при переносе точки приложения силы вдоль ее линии действия.
2) Момент силы относительно центра О равен нулю только тогда, когда сила равна нулю или когда линия действия силы проходит через центр О (плечо равно нулю).
3) Момент силы численно выражается удвоенной площадью треугольника ОАВ (рис. 20,б)
![]()
Этот результат следует из того, что
![]()
7. Теорема Вариньона о моменте равнодействующей.
Докажем следующую теорему Вариньона: момент равнодействующей плоской системы сходящихся сил относительно любого центра равен алгебраической сумме моментов слагаемых сил относительно того же центра.
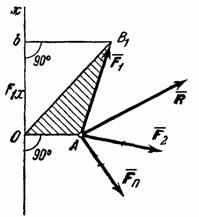
Рис.21
Рассмотрим систему
сил ![]() ,
, ![]() , …,
, …, ![]() ,
сходящихся в точке А (рис.21).
Возьмем произвольный центр О и
проведем через него ось Ох,
перпендикулярную к прямой ОА;
положительное направление оси Ох выбираем
так, чтобы знак проекции любой из сил
на эту ось совпадал со знаком ее момента
относительно центра О.
,
сходящихся в точке А (рис.21).
Возьмем произвольный центр О и
проведем через него ось Ох,
перпендикулярную к прямой ОА;
положительное направление оси Ох выбираем
так, чтобы знак проекции любой из сил
на эту ось совпадал со знаком ее момента
относительно центра О.
Для доказательства теоремы
найдем соответствующие выражения моментов m0(
), m0(
),
… . По формуле ![]() .
Но, как видно из рисунка,
.
Но, как видно из рисунка, ![]() ,
где F1x -
проекция силы
на
ось Ох;
следовательно
,
где F1x -
проекция силы
на
ось Ох;
следовательно
![]() .
.
Аналогично вычисляются моменты всех других сил.
Обозначим равнодействующую
сил
,
, …,
,
через ![]() ,
где
,
где ![]() .
Тогда, по теореме о проекции суммы сил
на ось, получим
.
Тогда, по теореме о проекции суммы сил
на ось, получим ![]() .
Умножая обе части этого равенства на ОА,
найдем:
.
Умножая обе части этого равенства на ОА,
найдем:
![]()
или,
![]() .
.