

1.2.4 Выбор бульдозеров
Срезку растительного слоя грунта, окончательную планировку дна, обратную засыпку пазух фундаментов, устройство въездов в котлован выполняют бульдозеры. Наибольшая эффективность бульдозеров на тракторах С-100 достигается при перемещении грунта на расстояния 40÷60 м.
 Рисунок
5. Бульдозер Д – 271
Рисунок
5. Бульдозер Д – 271
Таблица 8. Техническая характеристика бульдозера
Показатель |
Д-271 |
Базовая машина Размеры отвала, мм: ширина высота Скорость при наборе и перемещении грунта, м/с Скорость при холостом ходе, м/с Тяговое усилие трактора, кН |
С-100 3200 900 1,00 1,7 100 |
Таблица 9. Эксплуатационные показатели бульдозеров при разработке различных грунтов.
Тяговое усилие трактора, кН
|
Скорость перемещения, м/мин. |
Продолжительность набора Тн, мин. |
Время, затраченное на переключение скоростей Тп, мин |
Объем грунта в плотном состоянии, перемещаемый за 1 рейс q, м3 |
|
В груженом состоянии |
В порожнем состоянии |
||||
100 |
45 |
74 |
0,15 |
0,1 |
1,98 |
1.3 Технологическая схема разработки котлована.
При проектировании технологической схемы разработки котлована и траншей необходимо решить следующие задачи:
определить формы и размеры всех элементов экскаваторного забоя и экскаваторных проходок;
разбить поперечное сечение разрабатываемой выемки на экскаваторные проходки, установить их размеры;
установить пути движения транспорта и места их стоянки под погрузкой;
определить места расположения отвалов и их размеры.
запроектированный экскаваторный забой должен удовлетворять следующим требованиям:
обеспечить минимальное количество проходок;
высота (глубина) забоя должна быть достаточной для наполнения ковша экскаватора за одно черпание;
угол поворота стрелы (рукояти) экскаватора должен быть минимальным.
1.3.1 Технологическая схема разработки котлована одноковшовым экскаватором с драглайном.
Экскаваторы драглайн разрабатывают грунт ниже уровня стоянки экскаватора. Транспортные средства для вывоза грунта от этого экскаватора могут располагаться как на уровне стоянки экскаватора, так и на дне котлована, однако наибольшее распространение получила первая схема.

Рисунок 6. Производство работ по выемке с помощью ЭО 5111В и КрАЗ – 256Б.
Ширину торцевой (лобовой) проходки Впр, м, определяют по выражению
![]() ,
(11)
,
(11)
где R0 - оптимальный радиус резания грунта, м;
ln - длина рабочей передвижки экскаватора.
R0=0,8 R (12)
ln = 0.25* lстр (13)
где lстр – длина стрелы драглайна, м; R – максимальный радиус резания грунта на уровне стоянки, м.
R0=0,8*12 = 9.6 м
ln = 0.25*12,5 = 3,125 м
Впр=2*(9.6-3,125)1/2=18,15 м
Определяем количество проходок
Nпр = Вв /Вт =50/18,15 = 3
Исправленная ширина лобового забоя: Вл =Вв/ nпр=16,7м
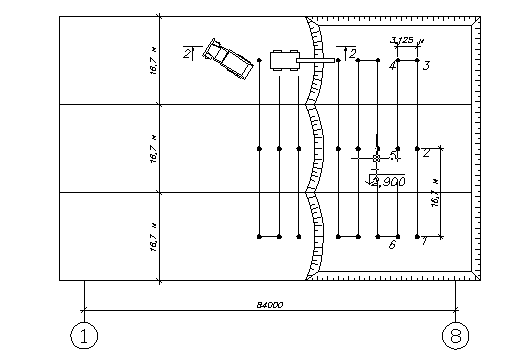
Рисунок 7. Продольно – челночная схема забоя.
1.3.2 Технологическая схема разработки котлована одноковшовым экскаватором с прямой лопатой.
Широкие котлованы (более 3,5R) разрабатываются сначала лобовой затем боковыми проходками. Максимальная ширина каждой боковой проходки
Вб = Вл + 0,7*Rcт,
где Rст – максимальный радиус резания грунта на уровне стоянки.
Ширина лобового забоя поверху при движении экскаватора по прямой определяется по формуле:
![]() ,
(11)
,
(11)
где R0 - оптимальный радиус копания;
R0=0,8 R , (14)
ln - длина рабочей передвижки экскаватора
ln=R – rст , (15)
где R – максимальный радиус резания грунта на уровне стоянки, м; rст – минимальный радиус резания грунта на уровне стоянки, м.
R0=0,8*7,8 = 6,24 м
ln = 7,8 - 4 = 3.8 м
Впр=2*(6,242-3,82)1/2=10 м
Вб = 10+ 0,7*7,8 = 15,6 м.
Определяем количество проходок
Nпр = Вв /Вб =50/15,6 = 4
Исправленная ширина бокового забоя: Вл =Вв/ nпр=50/4 = 12,5м.
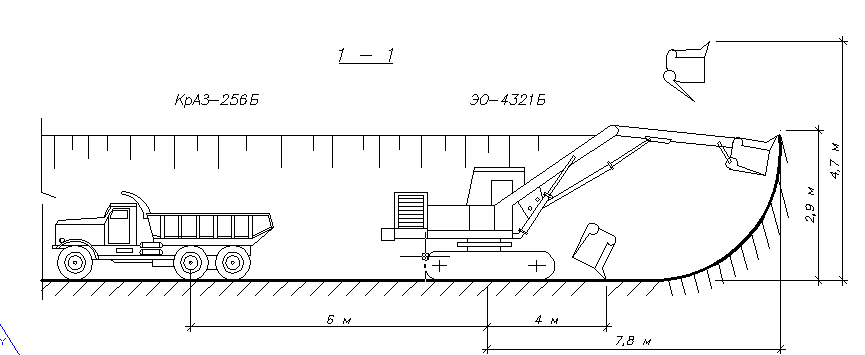
Рисунок 8. Производство работ по выемке с помощью ЭО 5111В и КрАЗ – 256Б.

Рисунок 9. Забой экскаватора с прямой лопатой.