

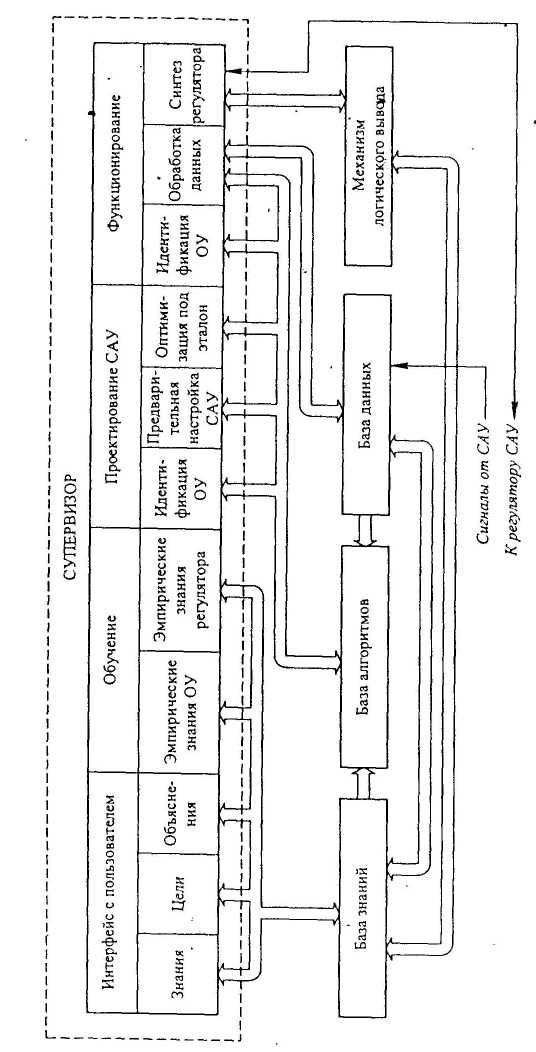
Архітектура експертного регулятора.
Етапи функціонування експертного регулятора.
Работа ЭР условно разбита на три этапа.
На первом э т а п е решаются задачи проектирования САУ:
выбор подходящей структуры модели объекта управления;
определение параметров модели по заданной структуре на основе нерекуррентных методов идентификации;
выбор закона управления;
— предварительная настройка параметров закона управления;
— окончательный синтез параметров закона управления с помощью процедур оптимизации по заданному пользователем критерию качества.
В результате решения всех перечисленных выше задач проектирования системы в пространстве показателей качества переходного процесса (далее — в пространстве качества) определяется "рабочая" точка.
На втором этапе решается задача обучения при изменении параметров модели системы в окрестности "рабочей" точки, полученной на этапе проектирования системы. Здесь формируются текущие эмпирические знания о динамических свойствах системы:
— знания о функциональных особенностях объекта управления (качественная зависимость между изменением параметров модели объекта управления и параметрами критерия качества системы);
— знания о функциональных особенностях регулятора (качественная зависимость между изменением коэффициентов закона управления и параметрами критерия качества).
На третьем этапе происходит непрерывное слежение за протекающими процессами и решаются задачи активной самодиагностики функционирующей системы, которые включают:
обработку текущих данных измерений с датчиков;
оценку изменений параметров системы как аналитическими методами, так и на основе эмпирических знаний о динамических свойствах объекта управления;
коррекцию параметров регулирующего устройства;
оценку проведенной коррекции;
— изменение закона управления (в случае необходимости).
Выбор между этапами работы ЭР осуществляется на основе правил, заложенных в специальную диспетчерскую программу, называемую в данной работе супервизором.
Порядок формування теоретичних знань по використанню алгоритмів ідентифікації, емпіричних знань, стратегій та евристик, знань про динаміку нелінійної системи, синтезу регулятора.
Основной проблемой при создании любой экспертной системы является разработка БЗ в достаточно узкой области экспертизы, которая может быть решена в два этапа: на первом этапе должны быть формализованы и структурированы экспертные знания о предметной области; на втором этапе должны быть формализованы представления этих знаний с помощью моделей искусственного интеллекта. Так как ЭР — это новое направление в области использования ЭС в управлении, то здесь ключевую роль играет разработка базы знаний в предметной области — области теории управления.
Поскольку теоретические знания содержат основные понятия, используемые при описании предметной области, и свойства отношении, используемых для установления связей между понятиями, то к теоретическим знаниям в данной работе относятся знания о диапазонах входных и возмущающих сигналов, подаваемых на систему, о порядке аппроксимирующей модели, о законе регулирования, о наличии нелинейных элементов в контуре управления, об областях эффективного использования алгоритмов решения задач идентификации и синтеза системы управления.
В эмпирических знаниях ЭР должна содержаться информация о качественной зависимости между подпространством параметров системы и подпространством прямых показателей качества переходного процесса в окрестности рабочей (полученной при синтезе) точки.