

Тема 2. Особливості ксу різного функціонального призначення.
Слідкуючі системи (сс).
Загальні відомості та класифікація сс.
Следящая система управления — вид системы автоматического управления, в которой заранее неизвестен вид управляющего воздействия. Обычно следящие системы предназначены для воспроизведения на выходе изменения управляющего воздействия, слежения за ним.
Пример следящей системы — радиолокационная станция, в её задачи входит сопровождение цели с заранее неизвестным законом движения.

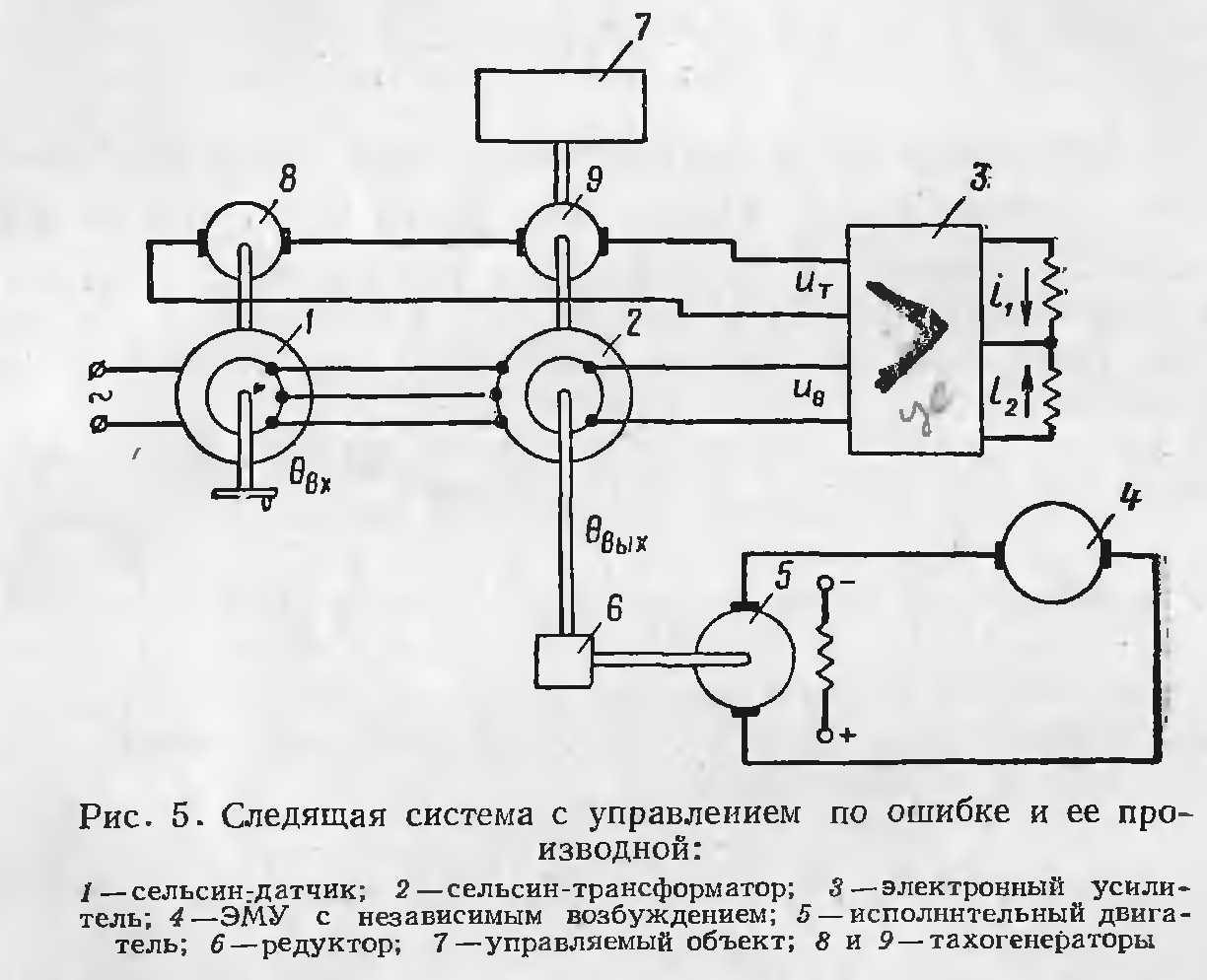
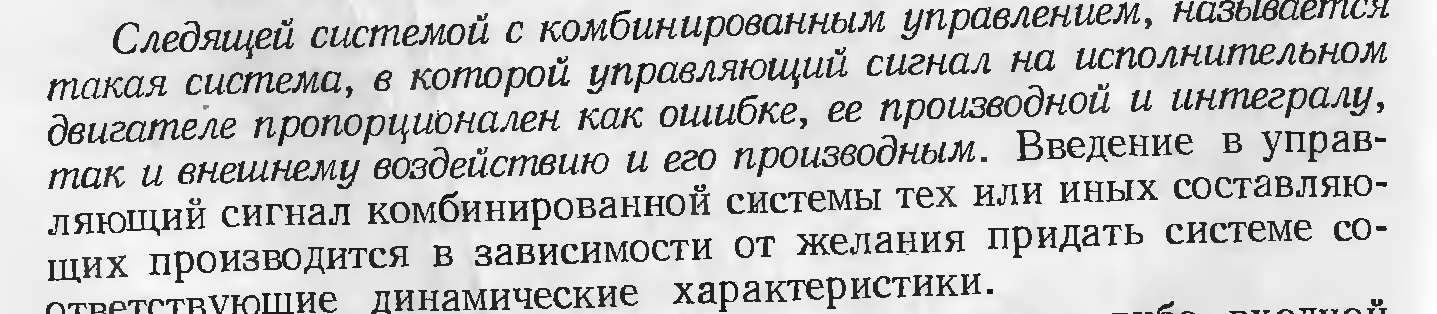
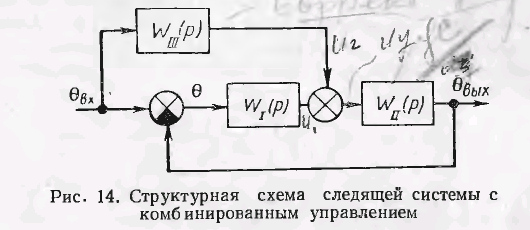
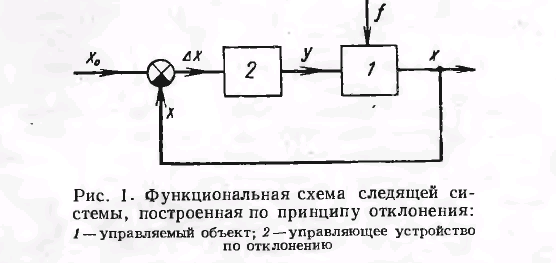
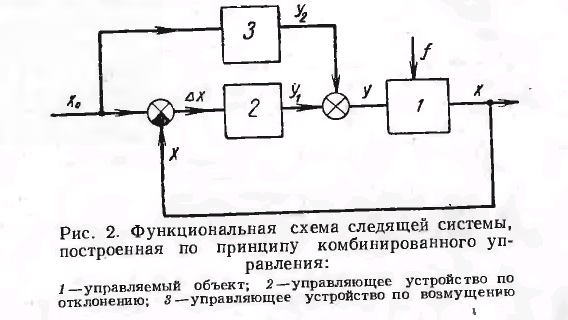
Сс з пропорційним законом, з керуванням по похибці з комбінованим управлінням.

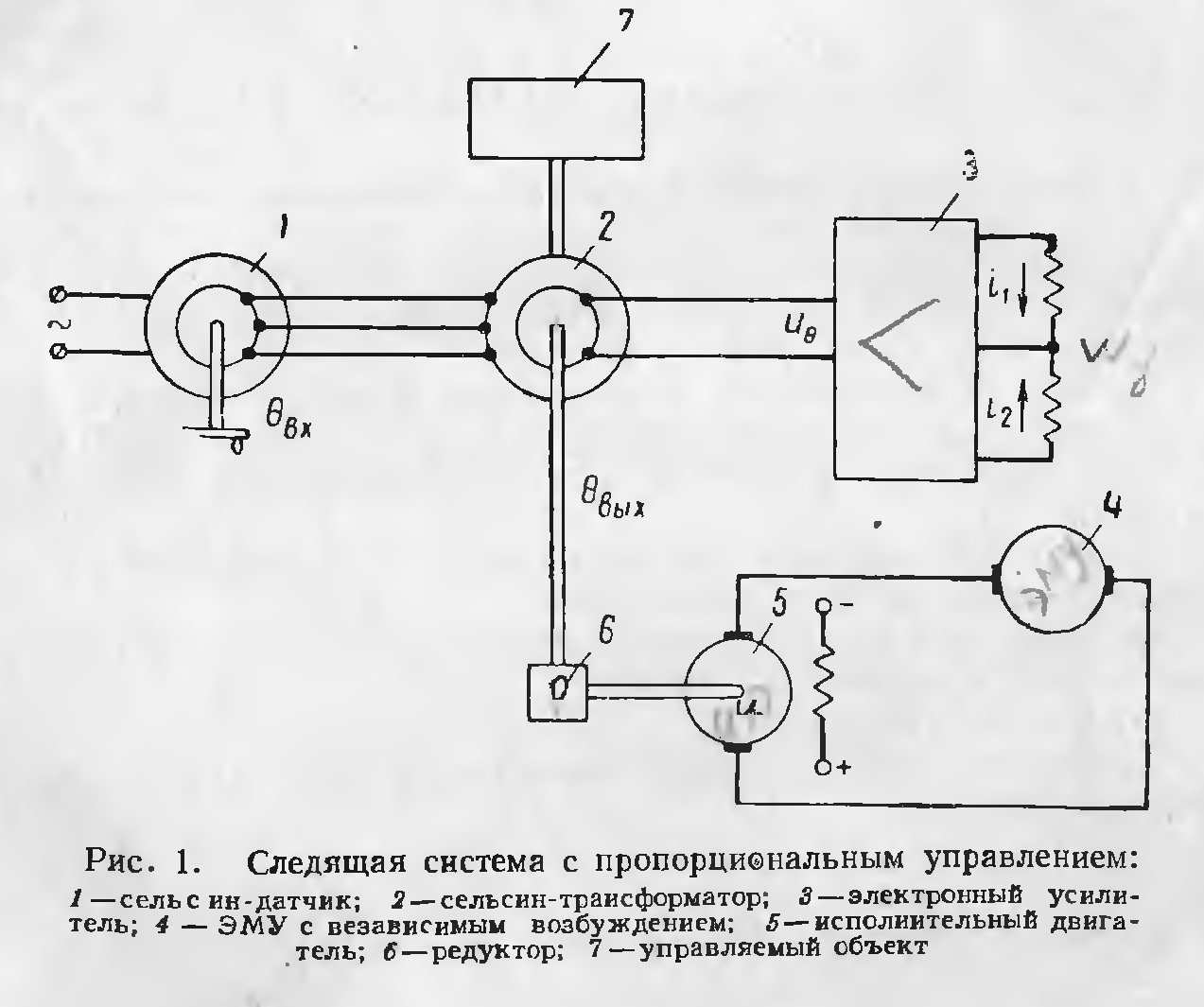
Пропорциональный закон регулирования имеет вид:
u(t) = Wрег(p) x(t) = k1x(t) ,
тогда в разомкнутом состоянии система будет характеризоваться ПФ:
W(p) = Wрег(p) Wo(p) = k1Wo(p) .

<дальше еще есть>
Коефіцієнти похибок.
При проектировании систем возникает необходимость оценки ошибки слежения в установившемся режиме при полиноминальном входном воздействии, являющемся аппроксимацией реальных воздействий на ограниченном интервале времени. В зависимости от вида передаточной функции фильтра системы эта ошибка может иметь конечное значение или изменяться с течением времени.
Если ошибка изменяется с течением времени, для ее расчета используется метод разложения ошибки по производным входного воздействия.
 где
где
 –
коэффициенты ошибки:
–
коэффициенты ошибки:
 ;
;
 ;
;
 ;
;
 .
.
 - коэффициент ошибки по положению;
- коэффициент ошибки по положению;
 - коэффициент ошибки по скорости;
- коэффициент ошибки по скорости;
 - коэффициент ошибки по ускорению;
- коэффициент ошибки по ускорению;
 - коэффициент ошибки по l-ой
производной входного воздействия.
- коэффициент ошибки по l-ой
производной входного воздействия.
 - ошибка по положению;
- ошибка по положению;
 - по скорости;
- по скорости;
 - по ускорению.
- по ускорению.
СС з використанням змінного струму.
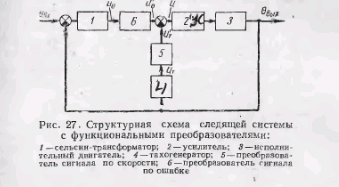
Структурні схеми СС.
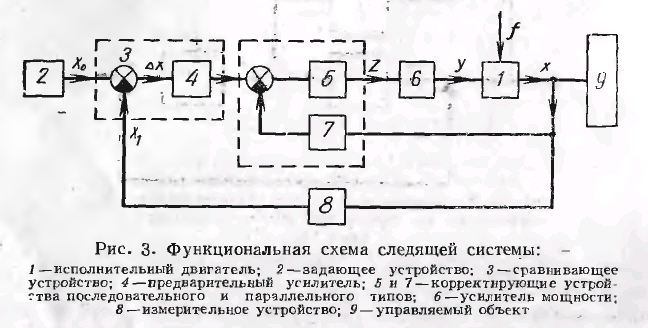
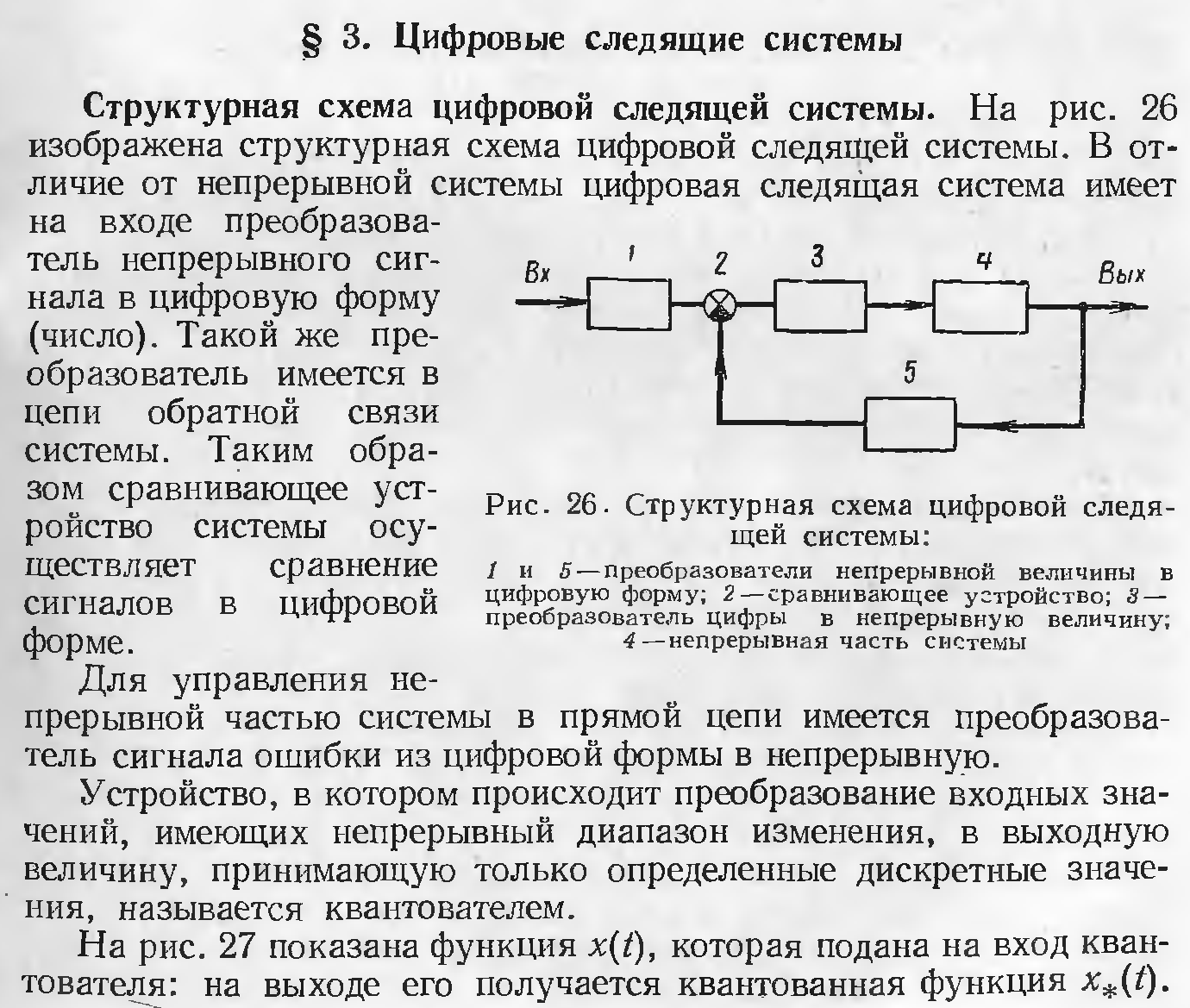
Цифрові та цифро-аналогові СС.
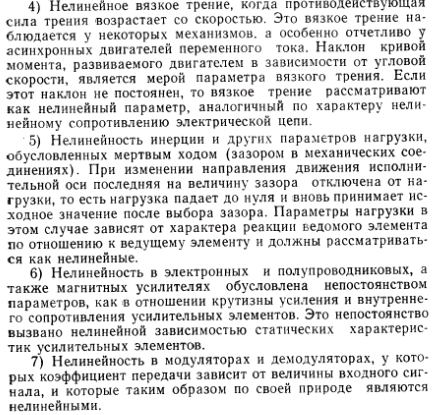
Нелінійні СС.
СС оптимальні по точності та швидкодії.
Методики проектування СС.
![]()
Реалізація СС.
Системи програмного керування (СПУ).
Класифікація СПУ.
Признак классификации |
Системы |
Метод задания программы |
Числовые Цикловые |
Структура системы управления |
Замкнутые Разомкнутые |
Особенности формообразования при обработке |
Контурные Позиционные |
Вид представления управляющей информации |
Дискретные Непрерывные |
Число управляемых рабочих органов (координат) |
Двухкоординатные 2,5-координатные Трехкоординатные Многокоординатные |
С труктурні схеми спу.
Рис. 7. Обобщенная структурная схема СЧПУ: 1 — устройство ввода программы; 2 — устройство реализации дополнительных функций; 3 — исполнительные элементы; 4 — привод подач; 5— датчик; 6 — устройство обратной связи; 7 — устройство обработки программы; 8 — устройство управления приводом.
Реалізація спу.
Системы программного регулирования реализуются как станки с ЧПУ.
Классификация ЧПУ:
-станки ЧПУ с постоянной структурой
- станки ЧПУ с изменяющейся структурой – универсальные станки.
Системы числового программного управления(СЧПУ) используют в своей реализации следящие системы.