

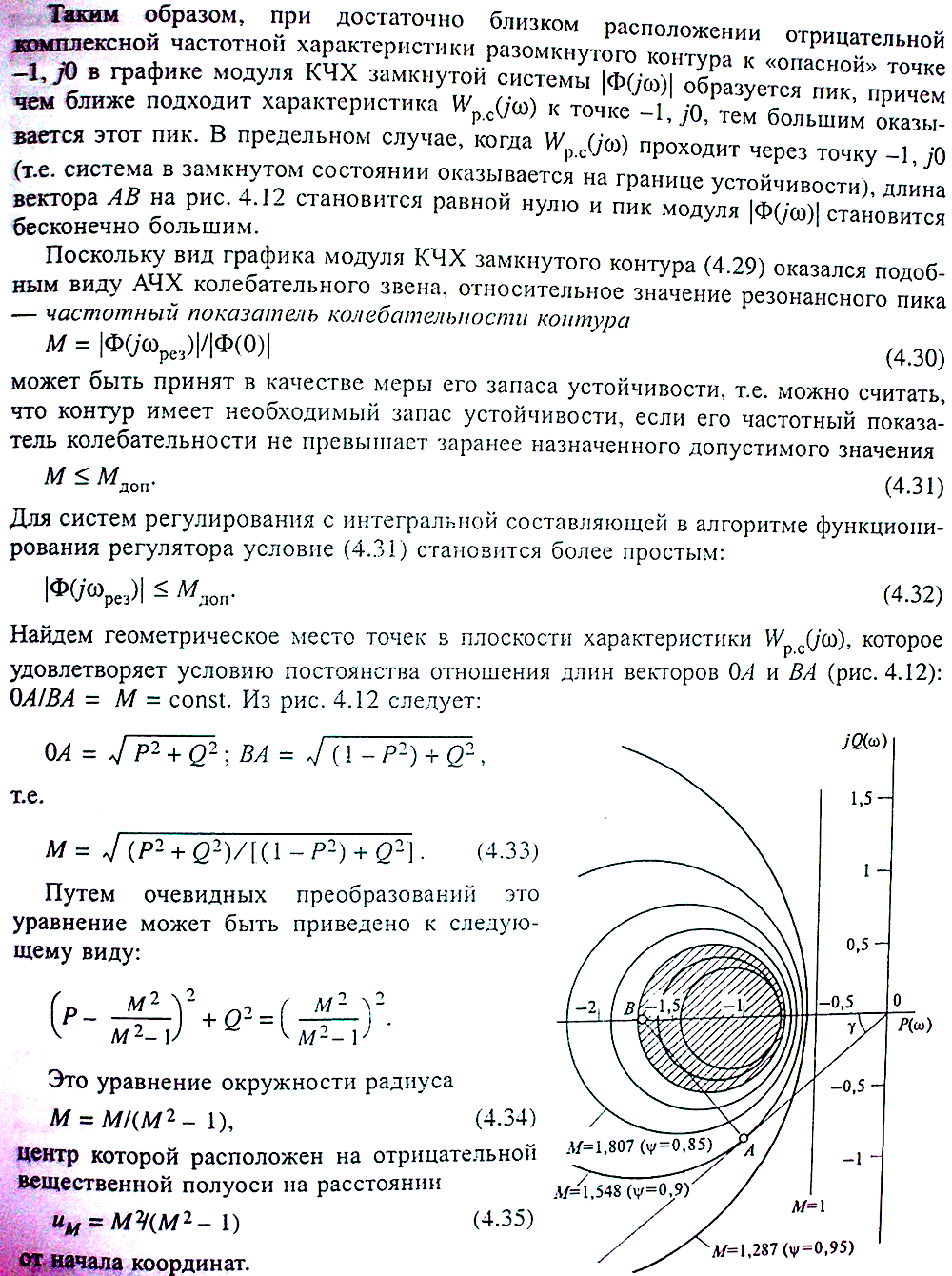
23. Частотный показатель колеб-ти. Запас устойчивости по максимуму ачх замкнутой системы. М-окружности и их свойства
Запас
устойчивости системы м оцениваться по
виду импульсной переходной характеристики
её замкнутого контура. Такая оценка
обладает наглядностью, что оказывается
важным при расчёте сложных структур
САУ, в также при расчёте схем с цифровыми
контроллерами.
Колебательному
характеру переходной, а следовательно,
и импульсной переходной характеристике
соответствует появление в графике
модуля КЧХ (гр-к АЧХ) резонансного пика.
То же самое справедливо и для контуров
произвольно высокого порядка, в том
числе и контуров с запаздыванием.
Высота
резонансного пика зависит от степени
приближения КЧХ разомкнутого контура
к «опасной» точке -1, j0
(по кр Найквиста охват этой точки
указанной КЧХ приводит к неустойчивости
замкнутого контура). 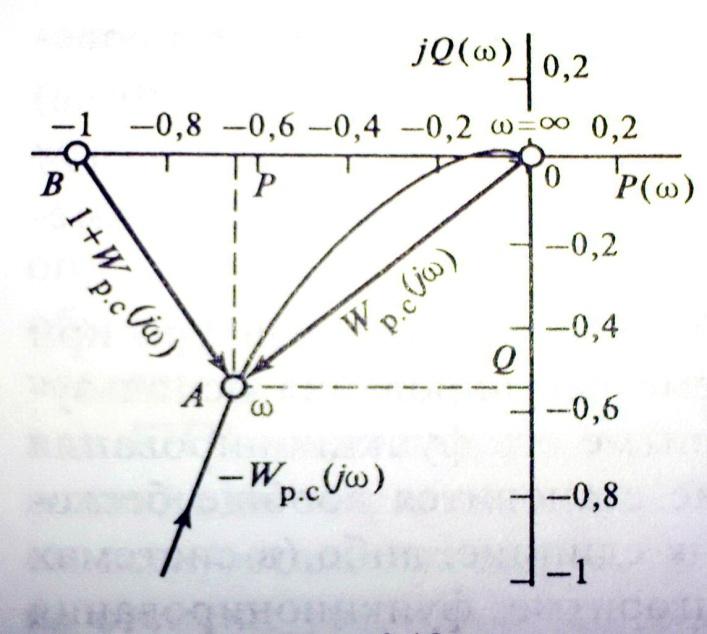
Модуль КЧХ: |Ф(jw) | = | Wpc(jw) |/|1 + Wpc(jw) |
Допустим, что х-ка р.к. Wpc(jw) располагается в компл-й плоскости как показано на рисунке.
Числитель
для нек-й фиксированной частоты ω равен
длине вектора Wрс(jw),
т.е. отрезку ОА, а знаменатель – длине
вектора, проведённого к Wрс(jw)
из точки -1,j0,
т.е. отрезку ВА. Поэтому знач. модуля
Ф(jw)
в графической интерпретации представляет
собой отношение длин отрезков ОА и ВА:
|Ф(jw)
| = ОА/ВА.
Проследим, как меняется это отношение
при изм-ии частоты от ω=0
до ω= .
.
Обычно
в сист рег-ия значение КЧХ р.к. при нулевой
частоте достаточно велико; если же в
сист регулирования используется рег-р
с интегральной составляющей в алг его
функционирования (И-, ПИ-, ПИД-), её значение
становится вообще бесконечно большим.
Поэтому значение Ф(j0)
вообще близко к единице, либо (в сист
регулирования с интегральной составляющей)
равно единице. С ростом частоты т.А
движется по направлению стрелки и в
пределе, при ω ->
 длина вектора ОА стремится к нулю, а
вектора ВА – к единице; соответственно
модуль характеристики также стремится
к нулю. Однако характер изменения
отношения векторов при промежуточных
значениях частоты 0 <ω
<
длина вектора ОА стремится к нулю, а
вектора ВА – к единице; соответственно
модуль характеристики также стремится
к нулю. Однако характер изменения
отношения векторов при промежуточных
значениях частоты 0 <ω
<
 оказывается различным в зав-ти от
удаления х-киWрс(jw)
от точки -1,j0
(точка B).
оказывается различным в зав-ти от
удаления х-киWрс(jw)
от точки -1,j0
(точка B).
Если
характеристика Wрс(jw)
располагается достаточно далеко от
точки -1,j0,длина
вектора ВА при указанном перемещении
точки А всё время остаётся больше длины
вектора ОА и их отношение монотонно
уменьшается от значения |Ф(jw)|
при ω=0
до нуля при при ω ->
 .
Если же х-каWрс(jw)
располагается близко к точке 1, j0,
то вначале отношение отрезков с ростом
частоты возрастает, поскольку длина
вектора ОА уменьшатся медленнее, чем
происходит уменьшение вектора ВА.
Достигнув максимального значения при
некоторой частоте ωрез,
это отношение затем устремляется к
нулю.
.
Если же х-каWрс(jw)
располагается близко к точке 1, j0,
то вначале отношение отрезков с ростом
частоты возрастает, поскольку длина
вектора ОА уменьшатся медленнее, чем
происходит уменьшение вектора ВА.
Достигнув максимального значения при
некоторой частоте ωрез,
это отношение затем устремляется к
нулю.
24. . Прямые и косвенные критерии качества процессов регулирования.
Прямые: динамическая ошибка, время регулирования, степень затухания.
Для оценки динамич. точ-ти АСР исп-т прямые пок-ли кач-ва и косвенные-интегральные критерии кач-ва.
Линейный
интегральный критерий и его свойства.I1= .
В АСР с И-,ПИ-,ПИД-рег-ми значениеI1
опред-ся значением коэф-та при интегральной
составляющей I1=1/kи.Минимуму
I1
отвечает максим. допустимое значение
kи.
.
В АСР с И-,ПИ-,ПИД-рег-ми значениеI1
опред-ся значением коэф-та при интегральной
составляющей I1=1/kи.Минимуму
I1
отвечает максим. допустимое значение
kи.
Св-ва:
1.Связан простым соотношением с парам-ми настройки рег-ов
2.Инвариантен по отношению к точке приложения возмущения.
3.Без ограничения на запас уст-ти прим-ся не может.
Квадратичный
интегральный критерий и его свойства.
I2= .
.
Св-ва:
1.не инвариантен по отношению к точке приложения возмущения.
2.Вычисления произв-ся по модулю КЧХ сис-мы.
3. Может применяться без ограничения на запас уст-ти.
Модульный:
I=
Выбор оптимальных настроек П-, И-, ПИ-, ПИД-алгоритмов.
При выборе настроек высший приоритет-запасу уст-ти.
Порядок расчета оптим. настроек при ограничении m=mдоп:
1.расчет линий заданного запаса уст-ти m=const.
2.Выбор критерия(показ-ля)кач-ва.
3.Определение оптимальных настроек.
4.Расчет переходного процесса и определение прямых показ-лей кач-ва.
При настройках,соотв. точке (kи)max при αкрит.:
1.Достиг-ся максим. кач-во АСР по лин. интегральному критерию kи=[(kи)max]max2.Характеристич. ур-ие замкнутой АСР имеет пару сопряженных комплексных корней кратности 2, нарушается соответсвие м/у показ-ми запаса уст-ти m,M и ψ.4. АСР стан-ся чувствительной к вариациям пар-ов рег-ра.
kп(m,ω)= ;kи(m,ω)=
;kи(m,ω)= .
.