

39. Нелинейности в системах управления технологическими процессами.Особенности нелинейных систем.
Практически
все технологические ОУ-нелинейные
динамич. сис-мы,кот. опис-ся нелин.
диф.ур-ми.Нелинейность-неизбежное св-во
ТОУ.Св-ва нелин. ОУ и особенности ряда
задач управления позволяют при работе
объекта в окрестности режима, для кот.
выполнена линеаризация,исп-ть лин. мат.
модели ОУ и теорию линейных сис-м.При
значительных отклонениях от номинального
режима линейные модели и линейная теория
не могут адекватно отразить действительное
поведение сис-мы упр-ия. Например,НС
устойчивая при малых отклонениях от
состония равновесия,м.б. неустойчивой
при большом отклонении от расчетного
режима.Пример нелинейной динамики. .Из
условия материального баланса:F·Δh=(Q1
–
Q2)·Δt,
F· =Q1
–
Q2;F·
=Q1
–
Q2;F· =x1·α1·
=x1·α1· -
x2·α2·
-
x2·α2· ;Δt→0;F·Δh'(t)=x1·α1·
;Δt→0;F·Δh'(t)=x1·α1· -
x2·α2·
-
x2·α2· -обыкновен.
нел. ДУ 1-го порядка.Линеаризация методом
малых отклонений.Непрер. мон. нелин.
ф-ция матем. основа разложение в ряд
Тейлора. .Наряду с «естественной»
нелинейностью (нелин. дифур-ия и ур-ия
статики) сис-мы упр-ия,как правило,содержат
немаренно вносимые нелин. динамич. и
статич. эл-ты.Пример динамич. НЭ-электрич.
ИМ с пост. ск-тью.В любой сис-ме упр-ия
неизбежно присутствует
насыщение-нелинейность,обусловленная
ограничением диапазона изменения
управляющих,регулирующих возд-ий и вых.
перемен.Uk,мин<Uk<Uk,макс;μk,мин<μk<μk,макс;уk,мин<уk<уk,макс.
-обыкновен.
нел. ДУ 1-го порядка.Линеаризация методом
малых отклонений.Непрер. мон. нелин.
ф-ция матем. основа разложение в ряд
Тейлора. .Наряду с «естественной»
нелинейностью (нелин. дифур-ия и ур-ия
статики) сис-мы упр-ия,как правило,содержат
немаренно вносимые нелин. динамич. и
статич. эл-ты.Пример динамич. НЭ-электрич.
ИМ с пост. ск-тью.В любой сис-ме упр-ия
неизбежно присутствует
насыщение-нелинейность,обусловленная
ограничением диапазона изменения
управляющих,регулирующих возд-ий и вых.
перемен.Uk,мин<Uk<Uk,макс;μk,мин<μk<μk,макс;уk,мин<уk<уk,макс.

Хар-ки
НЭ с насыщением:


Исходя из воз-ти линеаризации методом малых отклонений присутств. в сис-мах управления нелинейности подразделяют на линеаризуемые и нелинеаризуемые или на несущественно и существенно нелинейные. Для существенных нелинейностей разработаны спец. методы линеаризации:гармоническая линеаризация для исследования сис-м с НЭ в частотной обл-ти.;статич. линеаризация для исслед.сист-м с НЭ при случ. возд..Особые св-ва нелин. сис-м:1. недейств-т принцип суперпозиции.2.форма вых. сигнала зав-т от размера вх. сигнала(в лин.-не зависит).3.р-ция на гармонич. возд-ие-периодич. негармонич. ф-ция,содержащая бесконечное числогармоник.4.Возможны режимы устойчивых незатух. колебаний.
Типовые безинерционные нелинейности.
Насыщение

y
= kx, -a ≤ x ≤ a
y = c, x > a
y = -c, x < -a
Зона нечувствительности
y
= 0, -a ≤ x ≤ a
y = kx, x > a
y = kx, x < - a
НЭ с переменным коэффициентом передачи
y(x) = k1(x), |x| <a y(x) = k2(x), |x| > a
Различные односторонние нелинейности


Характеристики релейных элементов
Идеальное 2-позиционное реле
y = c, x ≥ 0 y = -c, x < 0
μ = 1, ε > 0 μ = 0, ε < 0
Идеальное 3-позиционное реле

y = c, x > a y = -c, x < -a y = 0, -a < x < a
2-позиционное реле с зоной возврата

3-позиционное реле с зоной нечувствительности ΔН и зоной возврата ΔВ
(-a
< x
< b)
и dx(t)/dt
>0, z1
= 0, иначе z1
= sign(x)
(-b
< x
< a)
и dx(t)/dt
<0, z2
= 0, иначе z2
= sign(x)
Если
dx(t)/dt
> 0, то z
= z1, иначе
z
= z2
sign(x)
= 1, x
> 0,
sign(x)
= -1, x
< 0
40. Исследование устойчивости нелинейных систем. Определение устойчивости системы по Ляпунову.
В нелин. сис-мах в общем случае рассм-ют уст-ть: 1.Состояния равновесия. 2.автоколебаний 3.движения. Уст-ть по Ляпунову:
Состояние равновесия наз-т устойчивым,если при любой заданной обл-ти ε допустимых отклонений от сост. равновесия можно указать обл-ть δ(ε),окружающую сост. равновесия и обладающую тем св-вом,что ни одно движение,начинающ. вблизи δ никогда не достигнет границ ε.
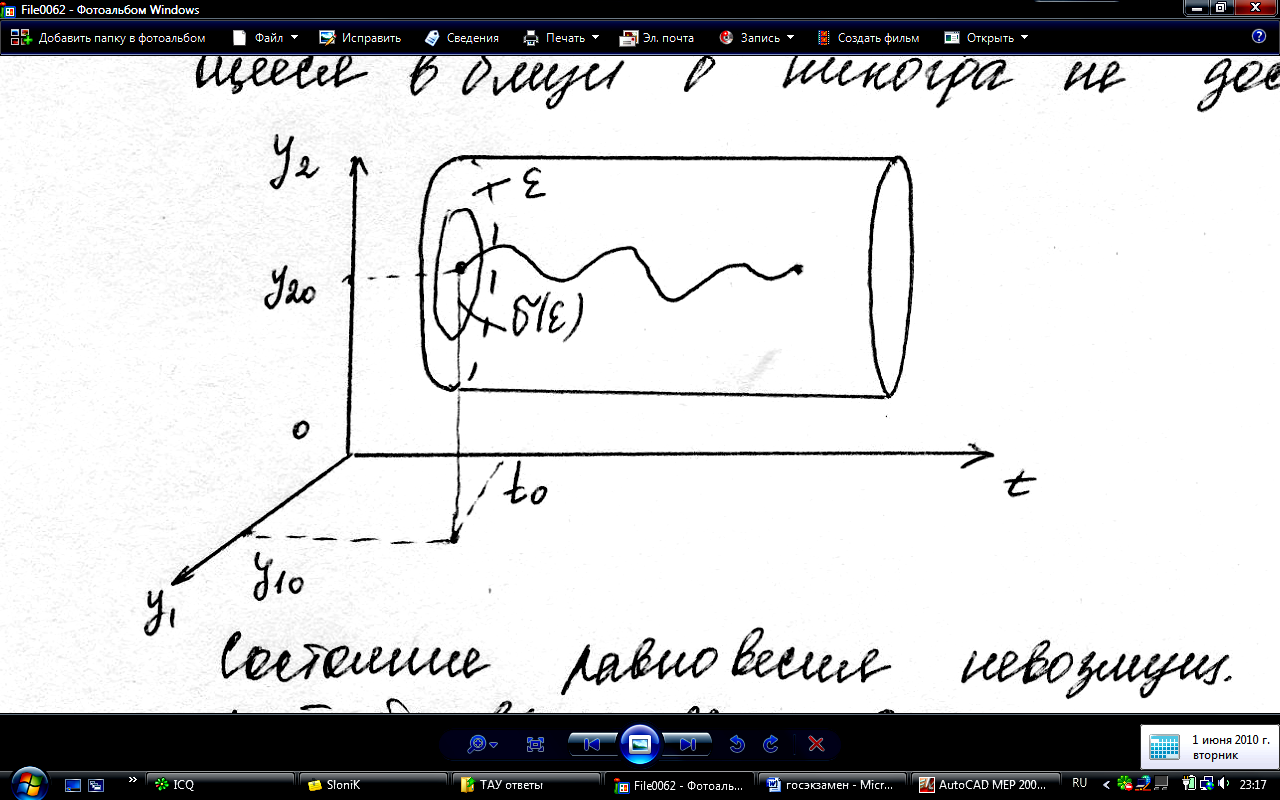
Состояние
равновесия невозмущенной сис-мы
устойчиво, если оно: 1.устойчиво. 2.любое
движение,нач. вблизи от сост.
равновесия,стремится к этому сост. при
t→∞.Уст-ть
по Ляпунову-это уст-ть в «малом».Иллюстрация
уст-ти в «малом»:в зав-ти от отклонения
сис-ма м.б. устойчивой,неуст., в сост.
неуст. равновесия.
Если к сост. равновесия стремится при t→∞ любое движение, то сис-ма устойчива в целом. Уст-ть в целом это уст-ть в «большом».Лин. уст. сис-ма это сис-ма асимптотически устойч. в целом. Нейтр. лин. сис-ма устойчива по Ляпунову, но не асимптотически.