

36. Дискретные системы, их виды. Цифровая реализация типовых алгоритмов регулирования.
Виды дискретных сигналов и систем.различ. два вида изменяющ. во времени величин:
1)непрерывные, определяемые в любой момент времени(темп-ра, напряж. и т.п.);
2) дискретные, принимающ. отличные от нуля знач. только в некотор. определенные моменты времени. В сист. управл. непрерыв. технологич. процессами переходят к дискретным сигналам с целью расшир. ф-цион. возможностей управляющ. и/или измерит. устройств. Непрерывные сигналы преобраз. в импульс. или числов. последовательности.
Сист. назыв. дискретной, если в цепи преобразов. сигналов хотя бы один из сигналов явл. дискретным. Дискрет. сист. приобретает особые не присущие непрерыв. сист. св-ва и должна исследов. методами спец. теории дискрет. сист. Современная сист. управл. технолог. процессами содержит непрерыв. элементы, элем. с непрерыв. вх. и дискрет. вых. и элем. с дискрет. вх. и дискрет. вых.
Дискрет. сист.:
1) импульсные а)с амплитуд-импульс. модуляцией, б)с широтно-импульс. модуляц., в)с частотно-импульс. модул., г)дельта импульс.]; 2) цифровые.
Цифровая реализация типовых линейных алгоритмов регулирования

П-алгоритм. Передаточная функция
Wву(z)
= kp Wдш(s)
=

W(z)
= WВУ(z)WДШ(z)
= kp = kp(1
– z-1)
= kp(1
– z-1)
W(s)
= kp(1
– e-Ts)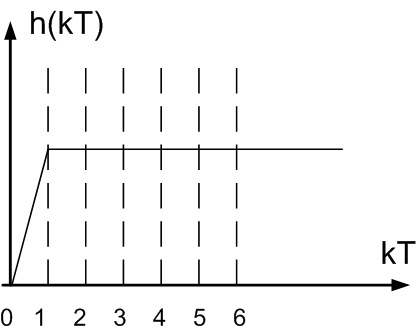
Wpэ(s)
=
 WДШ(s)W(s)
=
WДШ(s)W(s)
=
 (1
– e-Ts)
(1
– e-Ts)
Переходная характеристика:
hp(t) = (kp/T) [t – (Ф – 1)(t – T)]
И-алгоритм. Передаточная функция
Wву(z)
=

W(z)
= WВУ(z)WДШ(z)
=

W(s) = kиT
Wpэ(s)
=
 W(s)
=
W(s)
= kиT
=
kиT
=

ПИ-алгоритм.
Передаточная функция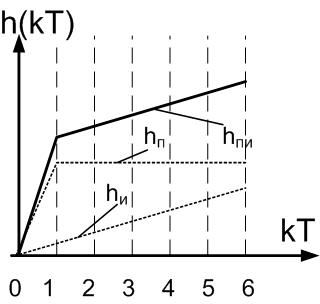
Wpэ(s)
=
 (1
–e-Ts)
+
(1
–e-Ts)
+

Wpэ(s)
=
 (1
– e-Ts
+
(1
– e-Ts
+
 )
)
Переходная характеристика:
hp(t)
= kp
[t
– (Ф – 1)(t
– T)
+
 t]
t]

Идеальный
Д-алгоритм


ПИД-алгоритм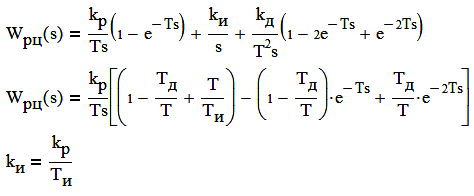

37. Математическое описание дискретных систем. Дискретное преобразование Лапласа и z-преобразование.
Дискрет. преобразов. Лапаса и Z-преобразов.
Дельта-имп. послед. может быть представл. в виде:
x*(t)= (t)∙(t–k∙T)=x[kT]∙
(t)∙(t–k∙T)=x[kT]∙ (t–k∙T).
(t–k∙T).
X(s)= (t)∙e–s∙dt;
X*(s)=
(t)∙e–s∙dt;
X*(s)= [kT]
[kT] (t–k∙T)∙e–s∙dt.
(t–k∙T)∙e–s∙dt.
Таким
образом X*(s)= [kT]
e–kTs.
[kT]
e–kTs.
Формула
Z-преобразов.:X(z)= [kT]
z–k,
где z=esT.
[kT]
z–k,
где z=esT.
Математическое описание дискретных систем.
![]()
СПИП–сист. преобразов. имп. последоват.. Неравновес. режимы имп. сист. описыв. ур-ниями
y*(t)+C1∙y*(t–T)+…+Cr∙y*(t–r∙T)=d0x*(t)+d1∙x*(t–T)+…+dl∙x*(t–l∙T).
При t=kT эквивал. форма описания дискрет. сист.:
y[kT]+C1∙y((k–1)T)+…+Cr∙y*((k–r)∙T)=d0x[kT]+d1∙x((k–1)T)+…+dl∙x((k–l)∙T). Решение для любой заданной числов. последоват. x[kT] находится: y[kT]=d0x[kT]+d1∙x((k–1)T)+…+dl∙x((k–l)∙T)–C1∙y((k–1)T)–…–Cr∙y*((k–r)∙T). Разностные ур-ние получается из дифференциального при замене дифференциалов приращениями dxx;dyy. при малых T:
1)
dxx=x[kT]–x[(k–1)T];
dx/dt ;
;
2)d2x2x=x[kT]–x[(k–1)T];
d2x/dt2 =
=
 =
=
=
 .
.
38. Передаточная функция дискретной системы.
В
рез-те z-преобразования
разностного
ур-ия:y[kT]+c1·y[(k-l)·T]+..+cr·y[(k-r)·T]=d0·x[kT]+d1·x[(k-1)·T]+..+dl·x[(k-1)·T]
получим(1+с1·z-1+с2·z-2+..+сr·z-r)·Y(z)=(d0+d1·z-1+d2·z-2+..+dl·z-l)·X(z).Передаточная
ф-ция дискретной сис-мы-отношение Y(z)
к
Х(z):W(z)=Y(z)/X(z)=(d0+d1·z-1+d2·z-2+..+dl·z-l)/(1+с1·z-1+с2·z-2+..+сr·z-r).После
умножения числителя и знаменателя на
z
в положительной степени (n=r)
получаем:W(z)=Y(z)/X(z)= .Определение
хар-к дискретной сис-мы в обл-ти изображений
производ-ся по таким же правилам,что и
систем непрерывных.При последовательном
соединенииn
эл-ов Wс(z)=W1(z)·W2(z)·..·
Wn(z).При
параллельном соединении Wc(z)=
.Определение
хар-к дискретной сис-мы в обл-ти изображений
производ-ся по таким же правилам,что и
систем непрерывных.При последовательном
соединенииn
эл-ов Wс(z)=W1(z)·W2(z)·..·
Wn(z).При
параллельном соединении Wc(z)= .При
встречно-параллельном соединении:Wз.с.(z)=
.При
встречно-параллельном соединении:Wз.с.(z)= .
.
Передаточные ф-ции дискретных звеньев.
Апериодическое
звено:Тa· +y(t)=kа·x(t);Тa·
+y(t)=kа·x(t);Тa· +y[kT]=kа·x[kT];
+y[kT]=kа·x[kT]; ·y[(k+1)·T]+(1-
·y[(k+1)·T]+(1- )·y[kT]=kа·x[kT];
)·y[kT]=kа·x[kT]; ·Y(z)=ka·X(z);W(z)=Y(z)/X(z)=
·Y(z)=ka·X(z);W(z)=Y(z)/X(z)= .
.
Интегрирующее
звено:y(t)=kи· →
→ =kи·х(t);y[kT]-y[(k-1)·T]=kи·T·x[kT];(1-z-1)·Y(z)=kи·T·X(z);W(z)=Y(z)/X(z)=
=kи·х(t);y[kT]-y[(k-1)·T]=kи·T·x[kT];(1-z-1)·Y(z)=kи·T·X(z);W(z)=Y(z)/X(z)= .
.
Дифференциирующее
звено:y(t)=kд· →y[kT]=
→y[kT]= ·(
x[kT]- x[(k-1)T]);Y(z)=
·(
x[kT]- x[(k-1)T]);Y(z)= ·(1-z-1)·X(z);W(z)=Y(z)/X(z)=
·(1-z-1)·X(z);W(z)=Y(z)/X(z)= ·(1-z-1).
·(1-z-1).