

32. Аср с дополнительным сигналом из промежуточной точки с дифференциатором и корректором (алгоритмы расчета)

Эквивалентный ОУ: Wо(s)=Wy(s)+Wz(s)∙Wд(s).Св-ва эквив. ОУ в существ. степени зависят от параметров дифференциатора kд и Tд
Методы выбора параметров Wд(s):
1)Расчетный по хар-ке экв. ОУ W01(s)=Wy(s)/Wz(s) при переходе к экв. каскадной схеме;
2) Итерационный с заданием нач. знач. kд и Tд;
3) Аппроксимацией хар-к корректора;
4) С использов. числ. методов расчета параметров при заданных огрнич. и критерии качества.
1) Расчетный по хар-ке экв. ОУ при переходе к экв. каскадной схеме. Эквив. каскадная схема

Схема б) может быть представл. в виде:
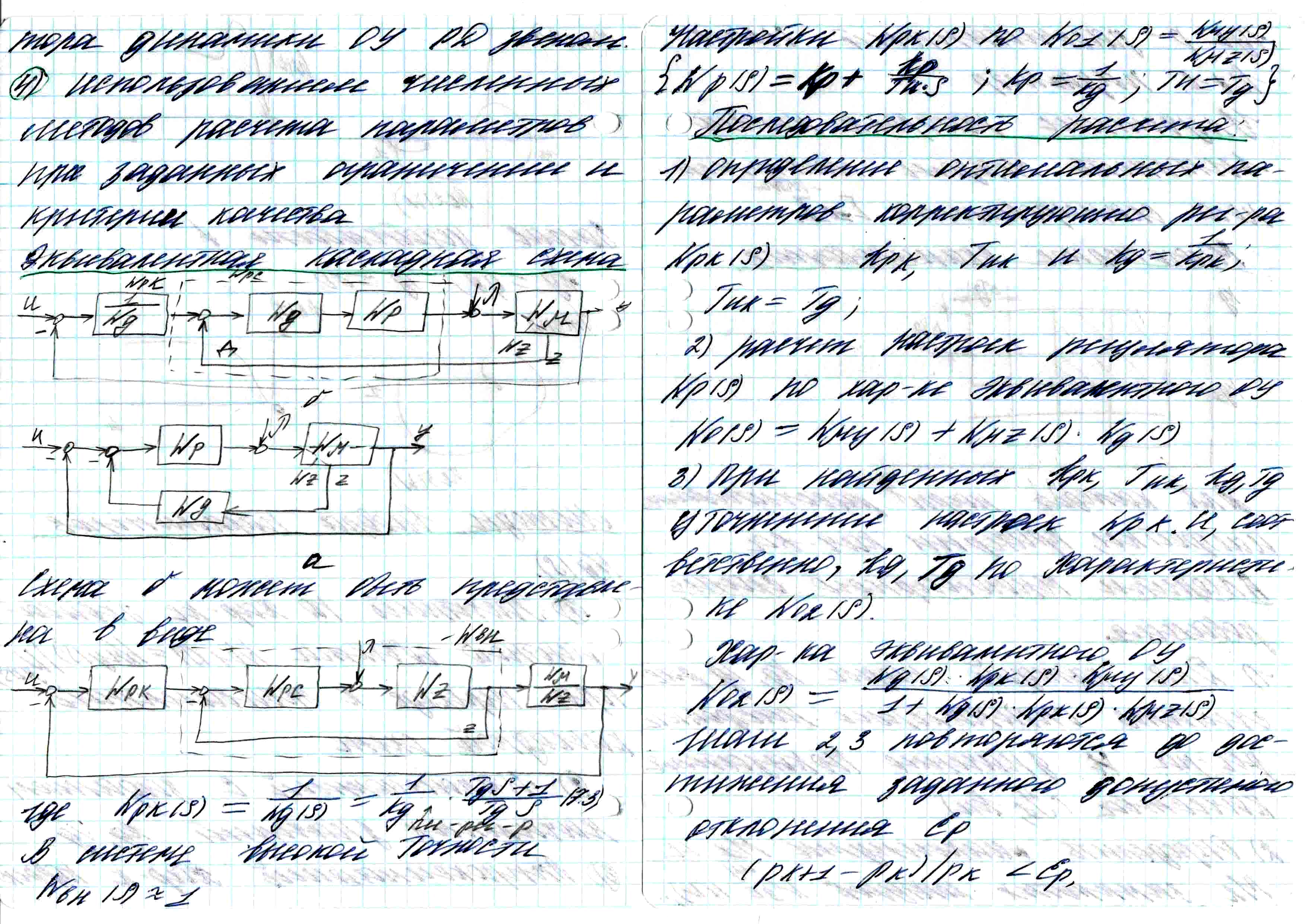
где Wрк(s)=1/Wд(s)=1/kд∙(Tд∙s+1)/Tд∙s.
В сист. с высокой точностью Wвн(s)=1, настройки
Wрк(s)=Wmy(s)/Wmz(s);
{Wр(s)= kп+ kп/(Tд∙s); kп=1/kд; Ти=Тд∙s}
Последоват. расчета:
1)определение параметров оптим. корректир. регулятора Wрк(s), kрк, Tик=Тд, и kд=1/kрк;
2)расчет настроек регулятора Wр(s) по хар-ке экв. ОУ: Wо(s)=Wmy(s)+Wmz(s)∙Wд(s);
3) при найденных kрк,Tик,Тд,kд уточняются настройки Wрк(s) и, соответственно, Тд,kд по хар-ке Wо2(s):
Wо2(s)=Wд(s)∙Wрк(s)∙Wmy(s)/(1+Wд(s)∙Wрк(s)∙Wmz(s)).
Улучшение настроек можно сделать методом многомерного сканирования.
Метод многомерного сканирования

Последоват. расчета:
1)Для каждой пары kд и Tд рассчитыв. оптим. настройки и знач. критерия качества (I1, kи);
2) Определяется максимум М1 и М2 замкнутых контуров Wзсuy(i), Wзсuz(i). Если М1 или М2 больше Мдоп, то результаты игнорируются.
2) Итерационный с заданием нач. знач. kд и Tд расчет kпи Ти 1)улучшение методом итераций;2)оптимизация методом многомерного сканиров.
3) Расчет настроек при аппроксимацией хар-к корректора динамики ОУ РД-звеном.
Последоват. расчета:
1) Определение по хар-кам ОУ передаточной ф-ции корректора Wк(s); 2) расчет по хар-ке [kmy(s)/kmz(s)]/Wmz(s) настроек рег-ра Wр(s);
3) аппроксимация Wк(i) характеристикой РД-звена Wд(s);
4) Уточнение настроек рег-ра по хар-ке эквивалентного ОУ: Wо(s)=Wmy(s)+Wmz(s)∙Wд(s)
33. Структура и эффективность каскадной аср, методика расчета.
Структурная схема каскадной АСР:
корректирующий(главный
регулятор), стабилизирующий. Канал
регулирующего возд-ия ост-ся инерцион.
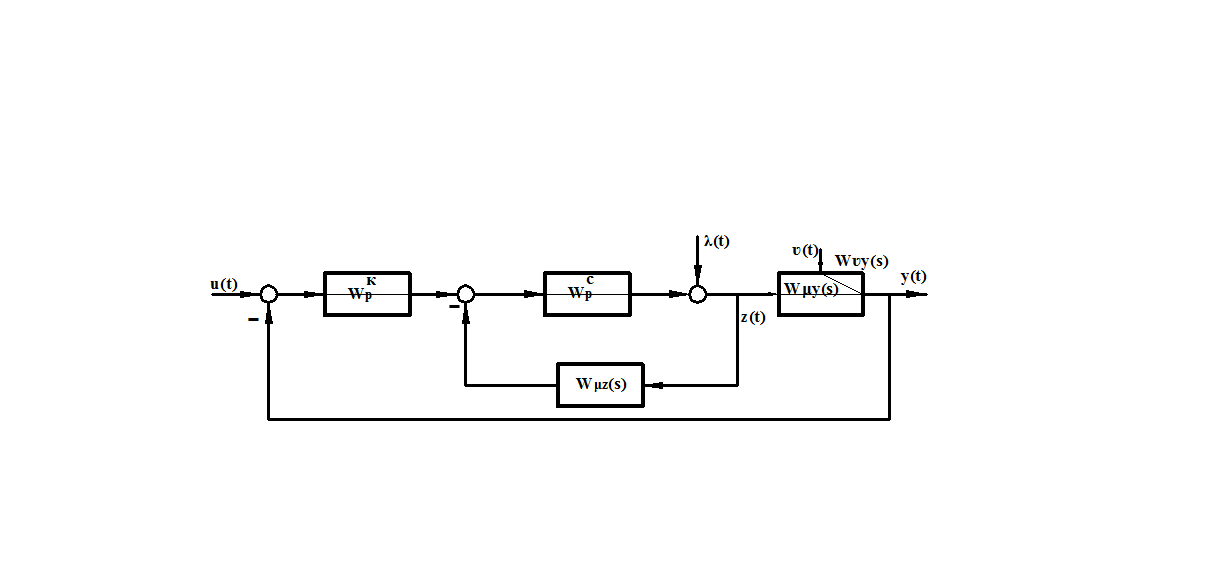
Преобразованная каскадная схема:
Расчет
каскадных АСР:
1. используем добавочную инф-цию по
промежуточной переменной z(t).
2. 2 замкнутых контура передачи возд-ия.
3. найти оптим. настройки. 4. Эквивалентные
ОУ:для стабилизирующего
рег-ра:Wэкв1(s)=Wμ(s)·Wрк(s)+Wz(s)(1);для
корректирующего рег-ра:
Wэкв2(s)=Wμ(s)· (2).Варианты
стр-ры каскадной АСР:Wрк(s)-ПИ;
Wрс(s)-ПИ;
Wрк(s)-ПИ;
Wрс(s)-П.Послед-ть
расчета:1)Wрк(s);Wрс(s);2)Wрс(s);Wрк(s).Если
Wz(s)-малоинерционный
канал, то настройки корректриующ. рег-ра
можно выполнить по приближению к
эквивалентной передаточной ф-ции
Wэкв(s)=Wμ(s)/Wz(s).
При найденных настройках корректрирующ.
рег-ра по хар-ке эквивалентного ОУ(1)
рассчитываются настройки стабилизирующ
рег-ра. После определения настроек
рег-ров производится проверка запаса
уст-ти контуров.
Wр.с.1(s)=(Wμ(s)·Wрк(s)+Wμz(s))·Wрс;Wр.с.2(s)=(Wμу(s)·
(2).Варианты
стр-ры каскадной АСР:Wрк(s)-ПИ;
Wрс(s)-ПИ;
Wрк(s)-ПИ;
Wрс(s)-П.Послед-ть
расчета:1)Wрк(s);Wрс(s);2)Wрс(s);Wрк(s).Если
Wz(s)-малоинерционный
канал, то настройки корректриующ. рег-ра
можно выполнить по приближению к
эквивалентной передаточной ф-ции
Wэкв(s)=Wμ(s)/Wz(s).
При найденных настройках корректрирующ.
рег-ра по хар-ке эквивалентного ОУ(1)
рассчитываются настройки стабилизирующ
рег-ра. После определения настроек
рег-ров производится проверка запаса
уст-ти контуров.
Wр.с.1(s)=(Wμ(s)·Wрк(s)+Wμz(s))·Wрс;Wр.с.2(s)=(Wμу(s)· Wрк(s);|Wз.с.u(iω)|=
Wрк(s);|Wз.с.u(iω)|= .КЧХ
замкнутых контуров по каналам управляющего
возд-ия:W1(iω)=
.КЧХ
замкнутых контуров по каналам управляющего
возд-ия:W1(iω)= ;W2(iω)=
;W2(iω)= .Послед-ть
расчета: 1.расчет настроекWк.р
по хар-ке эквивалентного объекта
W01=Wμу/Wμz.2.расчет
настроек Wс.р
по хар-ке эквивалентного объекта W02(s)=
Wμy(s)·Wрк(s)+Wμz(s).3.«улучшение»
настроек по хар-кам эквивалентных
объектов.
.Послед-ть
расчета: 1.расчет настроекWк.р
по хар-ке эквивалентного объекта
W01=Wμу/Wμz.2.расчет
настроек Wс.р
по хар-ке эквивалентного объекта W02(s)=
Wμy(s)·Wрк(s)+Wμz(s).3.«улучшение»
настроек по хар-кам эквивалентных
объектов.