

1.3. Принципы цифрового управления
На риc. 1.7 показана обобщенная схема система автоматического управления (САУ). Чтобы спроектировать реальную цифровую систему управления (ЦСУ) для того или иного ОУ, необходимо, прежде всего, ответить на вопрос, с какой целью и какими средствами предполагается управлять объектом, и выбрать соответствующие принципы управления. Последние существенно различаются в зависимости от характеристик ОУ, от характера информации, получаемой об объекте в процессе его работы, от характера окружающей среды и имеющейся информации об ее изменении в процессе работы, от наличия и полноты математического описания ОУ и окружающей среды и, что самое главное, от задачи, поставленной перед САУ, т. е. от цели управления.
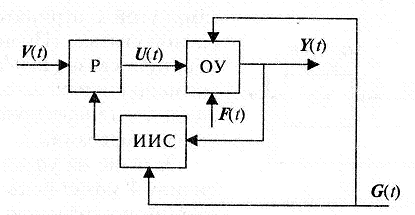
Рис. 1.7. Функциональная блок-схема САУ
Можно выделить следующие основные задачи, которые могут быть поставлены перед САУ: стабилизация управляемых величин, слежение за некоторой измеряемой величиной, программное управление состоянием ОУ, самонастройка САУ на оптимум какого-либо параметра, управление целесообразным поведением ОУ, управление живучестью САУ.
Задача стабилизации может решаться различными путями в зависимости от имеющейся информации от ОУ и о внешних воздействиях на него. Если все внешние воздействия на ОУ контролируются и могут быть измерены, а свойства ОУ и его динамические характеристики известны, то управление может вестись по возмущению в соответствии с функциональной схемой, показанной на рис. 1.8.

Рис. 1.8. Схема системы стабилизации по возмущению
В этом случае F≈ 0 и задача управления решается путем нахождения функции управления U(G), при которой обеспечивается условие:
Y=
![]() = const,
(1.2)
= const,
(1.2)
где
![]() — эталонное или требуемое значение
упрашгяемой величины, соответствующее
заданию V.
— эталонное или требуемое значение
упрашгяемой величины, соответствующее
заданию V.
Регулятор
(Р), выполняющий условие (1.2), обеспечивает
стабилизацию управляемых величин или
их инвариантность, т. е. независимость
от внешних воздействий с некоторой
погрешностью ![]() ,
которая должна быть минимально возможной.
Это достигается путем решения
соответствующей оптимизационной задачи
для нахождения параметров регулятора,
обеспечивающих минимум
.
При наличии неконтролируемых возмущений
(F
,
которая должна быть минимально возможной.
Это достигается путем решения
соответствующей оптимизационной задачи
для нахождения параметров регулятора,
обеспечивающих минимум
.
При наличии неконтролируемых возмущений
(F![]() 0) и при недостаточно
полном математическом описании ОУ
управление по возмущению не может
обеспечивать требуемой стабилизации
управляемых величин. В этом случае
применяется принцип управления по
отклонению в соответствии с функциональной
схемой, показанной на рис. 1.9. Управляющее
воздействие на ОУ
U(e)
зависит от
разности между управляемой величиной
и заданием (Е
= V— Y)
и направлено в
сторону уменьшения этой разности.
Образующаяся связь между выходом ОУ и
входом Р называется обратной связью, а
так как выход ОУ вычитается из задания,
то такая обратная связь называется
отрицательной. Поэтому САУ, показанная
на рис. 1.9, является замкнутой с
отрицательной обратной связью.
(Положительная обратная связь
(F
= V + Y)
также
используется в технике для создания
генераторов периодических колебаний.).
0) и при недостаточно
полном математическом описании ОУ
управление по возмущению не может
обеспечивать требуемой стабилизации
управляемых величин. В этом случае
применяется принцип управления по
отклонению в соответствии с функциональной
схемой, показанной на рис. 1.9. Управляющее
воздействие на ОУ
U(e)
зависит от
разности между управляемой величиной
и заданием (Е
= V— Y)
и направлено в
сторону уменьшения этой разности.
Образующаяся связь между выходом ОУ и
входом Р называется обратной связью, а
так как выход ОУ вычитается из задания,
то такая обратная связь называется
отрицательной. Поэтому САУ, показанная
на рис. 1.9, является замкнутой с
отрицательной обратной связью.
(Положительная обратная связь
(F
= V + Y)
также
используется в технике для создания
генераторов периодических колебаний.).
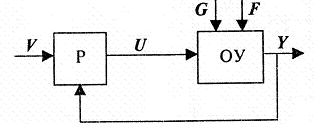
Рис. 1.9. Схема системы стабилизации по отклонению
З адание
на управляемую величину V
может быть
либо равно требуемому значению Y,
либо несколько превышать это значение
для того, чтобы обеспечить значение
Е,
достаточное для работы регулятора,
параметры которого определяются
путем решения соответствующей
оптимизационной задачи. Для повышения
точности работы САУ применяются
комбинированные системы с функциональной
схемой, показанной на рис. 1.10, в которой
сочетаются принципы управления по
возмущению и по отклонению.
адание
на управляемую величину V
может быть
либо равно требуемому значению Y,
либо несколько превышать это значение
для того, чтобы обеспечить значение
Е,
достаточное для работы регулятора,
параметры которого определяются
путем решения соответствующей
оптимизационной задачи. Для повышения
точности работы САУ применяются
комбинированные системы с функциональной
схемой, показанной на рис. 1.10, в которой
сочетаются принципы управления по
возмущению и по отклонению.
Рис. 1.10. Схема комбинированной системы стабилизации
З адача
слежения за изменениями измеряемой
величины
адача
слежения за изменениями измеряемой
величины ![]() например координат самолета, выполняется
с помощью следящей системы. Основным
требованием, предъявляемым к следящей
системе, является поддержание минимума
погрешности d(t),
определяемой
как разность между заранее неизвестным
законом изменения измеренной величины
V(t)
и управляемой величиной Y(t).
Следящие системы обычно представляют
собой замкнутые системы управления
по отклонению (рис. 1.11). В них задающее
воздействие
V(t)
однозначно
определяет эталонное значение
например координат самолета, выполняется
с помощью следящей системы. Основным
требованием, предъявляемым к следящей
системе, является поддержание минимума
погрешности d(t),
определяемой
как разность между заранее неизвестным
законом изменения измеренной величины
V(t)
и управляемой величиной Y(t).
Следящие системы обычно представляют
собой замкнутые системы управления
по отклонению (рис. 1.11). В них задающее
воздействие
V(t)
однозначно
определяет эталонное значение
управляемой
величины Y(t).
Поэтому режим стабилизации можно
считать частным случаем слежения, когда
должно выполняться равенство ![]() .
.
Программное управление какой-либо управляемой величиной в зависимости от наличия математического описания ОУ и неконтролируемых внешних воздействий может осуществляться разомкнутыми и замкнутыми системами.
Если существует точное математическое описание ОУ, а все внешние воздействия контролируются и путем регулирования по возмущению их влияние может быть сведено к минимуму (практически до нуля), то программное управление осуществляется
п о
разомкнутой системе, жестким управлением.
При этом задается такой закон изменения
управляющей величины
U(t),
который
обеспечивает требуемый закон изменения
управляемой величины Y(t),
так как если известны уравнения,
описывающие поведение ОУ, то по
заданному закону изменения управляемой
величины
Y(t)
=
о
разомкнутой системе, жестким управлением.
При этом задается такой закон изменения
управляющей величины
U(t),
который
обеспечивает требуемый закон изменения
управляемой величины Y(t),
так как если известны уравнения,
описывающие поведение ОУ, то по
заданному закону изменения управляемой
величины
Y(t)
= ![]() можно вычислить
требуемый закон изменения управляющей
величины U(t).
можно вычислить
требуемый закон изменения управляющей
величины U(t).
Рис. 1.12. Схема разомкнутой системы программного управления
Применение программного устройства (ПУ) (рис. 1.12), задающего эту зависимость, вычисленную заранее, обеспечивает выполнение программного управления. Кроме того, зависимость U(t) может вычисляться автоматически, в процессе функционирования ОУ, с помощью специального вычислительного устройства (управляющей вычислительной машины (УВМ) с операционной системой реального времени), моделирующего ОУ (рис. 1.13). На вход модели (М) подаются задающее воздействие V(t) и контролируемые возмущения G(t). С помощью модели вычисляется зависимость U(t), подаваемая на ОУ и обеспечивающая эталонный закон управления Y3(t). При этом, очевидно, что модель ОУ должна работать значительно быстрее самого ОУ.
Л юбая
неточность математического описания
ОУ или наличие неконтролируемых
воздействий
F(t)
на ОУ приводит
к нарушению соответствия между Y3(t)
и Y(t),
т. е. к невыполнению требуемого закона
изменения управляемой величины. В этом
юбая
неточность математического описания
ОУ или наличие неконтролируемых
воздействий
F(t)
на ОУ приводит
к нарушению соответствия между Y3(t)
и Y(t),
т. е. к невыполнению требуемого закона
изменения управляемой величины. В этом
Рис. 1.13. Схема разомкнутой системы программного управления с моделью ОУ
случае следует применять принцип программного управления по отклонению, т. е. использовать замкнутую САУ (рис. 1.14). Теперь в регулятор (УВМ) подаются задающее воздействия V(t) и измеренные значения управляемой величины Y(t). В результате их сравнения УВМ вырабатывает такое управляющее воздействие U(t), которое обеспечивает минимальное значение рассогласования E(t) = V(t) — Y(t). Функция V(t) хранится в памяти УВМ, выполняющей функцию программного устройства.

Рис. 1.14. Схема замкнутой системы программного управления
Для повышения точности управления могут использоваться комбинированные САУ, показанные на рис. 1.15. Описанные ранее системы автоматической стабилизации можно рассматривать как частный случай программных систем, в которых программа не зависит от времени, т. е. V(t) = const.
Самонастройка или адаптация осуществляется адаптивными САУ. Задачи, стоящие перед такими системами, значительно сложнее.
П ервой
задачей является поддержание экстремума
управляемой величины. Для этой цели
на ОУ могут подаваться пробные воздействия
ервой
задачей является поддержание экстремума
управляемой величины. Для этой цели
на ОУ могут подаваться пробные воздействия
![]() от регулятора
(Р), анализируется знак изменения
управляемой величины
Y,
вычисляется
управляющее воздействие
от регулятора
(Р), анализируется знак изменения
управляемой величины
Y,
вычисляется
управляющее воздействие
Рис. 1.15. Схема комбинированной системы программного управления
U ,
приближающее режим к точке экстремума,
и подается на ОУ (рис. 1.16).
,
приближающее режим к точке экстремума,
и подается на ОУ (рис. 1.16).
Рис. 1.16. Схема системы адаптации с экстремальным регулятором
Таким образом, САУ автоматически поддерживает режим, близкий к оптимальному, при котором все dyjduj ≈ 0. Устройства, обеспечивающие режим работы ОУ, близкий к оптимальному, называются автоматическими оптимизаторами или экстремальными регуляторами.
Подобные регуляторы применяются для ОУ, имеющих экстремальные характеристики и существенные, но медленно меняющиеся неконтролируемые возмущения, приводящие к изменению экстремальных характеристик. При этом можно считать, что за время прихода за счет управления к экстремуму характеристики ОУ изменяются несущественно.
Второй
задачей самонастройки является
поддержание оптимальной работы САУ
но условию ее максимального быстродействия.
В этом случае показателем экстремума
является время, в течение которого
система приходит в соответствие с
изменением задающего воздействия
V(t).
Это время может
анализироваться с помощью специального
устройства самонастройки (С),
изменяющего
параметры регулятора (Р) таким образом,
чтобы время регулирования стало
минимальным (рис. 1.17). Параметры регулятора
R
изменяются за
счет воздействия
М, вычисляемого
устройством самонастройки (программой
УВМ) по результатам измерения Y(t),
R(t)
и вычисления времени реакции ОУ на
пробные задающие воздействия ![]() V.
V.

Рис. 1.17. Схема системы самонастройки на максимальное быстродействие
Объект управления вместе с регулятором в этом случае рассматривается как новый объект экстремального управления более высокой категории, управляемый устройством самонастройки (УС). В этом случае управляемыми величинами являются показатели качества переходных процессов, а также V, вычисляемые в УС на основании Y(t)и R(t), а управляющей — М, подаваемой в Р для настройки его параметров. Таким образом, рассматриваемую систему можно разбить на две подсистемы, из которых одна управляет другой.
Управление целесообразным поведением характерно для сложных многосвязанных систем с элементами искусственного интеллекта. Как правило, четкое математическое описание таких систем связано с большими трудностями. Поэтому подобные системы часто относят к классу интеллектуальных систем управления (ИСУ), описываемых как нечеткие системы автоматического управления, либо как человеко-машинные системы.
При создании САУ целесообразным поведением интеллектуальных систем необходимо, прежде всего, решать следующие проблемы:
Проблему интеллектуализации управления стратегического уровня, обеспечивающего планирование целесообразного поведения. Она связана с решением задач по выбору стратегии выполнения требуемого задания и формирования последовательности действий, необходимых для его реализации. Кроме того, данный уровень должен обеспечивать оперативную коррекцию поведения в зависимости от изменений внешней среды и в самой ИСУ, например, из-за повреждений. Функционирование ИСУ на этом уровне требует наличия развитых способностей к приобретению знаний о закономерностях окружающей обстановки, к интерпретации, классификации и идентификации возникающих ситуаций, к анализу и запоминанию последствий своих действий, исходя из опыта работы (свойство самообучения).
Проблему интеллектуализации управления тактического уровня, которая в первую очередь касается поиска решения одной из ключевых задач, связанных с планированием маршрутов и траекторий продвижения к цели в неполностью определенных условиях, в том числе и с различными препятствиями, с учетом динамики исполнительных подсистем и текущих изменений среды функционирования. При этом должно обеспечиваться не только продвижение к цели по априорно задаваемым маршрутам и траекториям, но и необходимые произвольные изменения продвижения к заданному целевому объекту.
• Проблему интеллектуализации управления исполнительного уровня, которая связана с обеспечением активной адаптации управления исполнительными механизмами к изменениям нагрузочных характеристик, к вариациям собственных параметров и параметров среды функционирования.
Интеллектуальная сенсорная информационно-измерительная система должна обеспечивать замыкание контуров управления различных уровней путем формирования соответствующих афферентных потоков. Основной проблемой интеллектуализации такой системы является определение степени адекватности преобразуемой сенсорной информации целям функционирования ИСУ и степени достоверности отображения как ее внешней среды, так и внутреннего состояния объектов управления, а также обеспечения системы способностью к адаптации.
В настоящее время для решения перечисленных проблем в ИСУ используют проблемно-ориентированные экспертные системы в качестве интеллектуальных экспертных регуляторов (ЭР) каждого из уровней управления. Общей отличительной чертой таких регуляторов является возможность инициализации тех программно реализованных алгоритмов управления или распознавания, выбор которых в той или иной ситуации представляется наиболее оправданным. Поэтому важнейшим среди множества принципиальных вопросов построения ЭР является определение объема выполняемых функций, синтез архитектуры построения, формирование базы алгоритмов и соответствующей базы знаний, конструирование машины логического вывода, обеспечивающей режим реального времени.
Д ля
обеспечения решения возлагаемых на ЭР
задач последние функционально должны
содержать следующие основные модули
(рис. 1.18): супервизор (СВ), базу знаний
(БЗ), базу
алгоритмов
(БА), базу данных (БД), машину логического
вывода (МЛВ), и контроллер (К) для связи
с аппаратными средствами систем
управления. Кроме того, ЭР может содержать
имитационную модель (ИМ), анализатор
(А) и контроллер адаптации (КА) для
обучения и адаптации к изменяющимся
условиям функционирования.
ля
обеспечения решения возлагаемых на ЭР
задач последние функционально должны
содержать следующие основные модули
(рис. 1.18): супервизор (СВ), базу знаний
(БЗ), базу
алгоритмов
(БА), базу данных (БД), машину логического
вывода (МЛВ), и контроллер (К) для связи
с аппаратными средствами систем
управления. Кроме того, ЭР может содержать
имитационную модель (ИМ), анализатор
(А) и контроллер адаптации (КА) для
обучения и адаптации к изменяющимся
условиям функционирования.
Рис. 1.18. Схема интеллектуальной системы управления
Супервизор должен обеспечивать выбор одного из режимов работы, включая интерфейс с пользователем (для наполнения базы знаний, определения целей и алгоритмов управления и пр.), настройку контуров управления, обучение и собственно функционирование, предусматривающее обработку данных, идентификацию, коррекцию контуров управления, оценку качества проведенной коррекции.
База знаний должна содержать знания о динамике объекта управления, диапазоне входных и возмущающих сигналов, алгоритмах базы алгоритмов. База алгоритмов должна содержать множество алгоритмов управления и идентификации. База данных должна содержать информацию о целях управления и о текущем состоянии системы и процесса ее функционирования.
Машина логического вывода должна обеспечивать экспертные заключения по управлению в режиме реального времени.
Исходя из основной функции, а именно — решения задачи проектирования оптимального процесса управления, можно выделить следующие основные типы интеллектуальных систем управления с ЭР.
Простейшей ИСУ является система с жесткой логикой. В такой системе база знаний (БЗ) неизменна и задачей ЭР является обеспечение функционирования регулятора (Р) в оптимальном режиме, путем логического анализа данных, поступающих из сенсорной информационно-измерительной системы (СИИС), связанной с объектом управления (ОУ), и базы данных (БД). БЗ в такой системе представляет собой набор правил, набранных пользователем-проектировщиком в процессе создания ИСУ и не изменяющихся в процессе функционирования. Машина логического вывода (МЛВ) анализирует эти правила, используя данные БД, пополняемые из СИИС, и принимает решения об использовании того или иного алгоритма из базы алгоритмов (БА). Супервизор (СВ) по выбранному алгоритму вырабатывает задающие воздействия, подаваемые через контроллер (К) в регулятор и обеспечивающие оптимальное функционирование системы.
При необходимости адаптации параметров регулятора под изменяющиеся внешние условия, параметры объекта управления (ОУ) и параметры исполнительных механизмов (ИМ) структура ИСУ усложняется, так как теперь на регулятор поступают не только сигналы задания, но и сигналы адаптации — из блока настройки СВ через тот же или дополнительный контроллер адаптации (КА). В этом случае БЗ должна быть дополнена правилами для принятия решения об изменении настройки регулятора, а БА должна быть дополнена соответствующими алгоритмами адаптации. Решения по прежнему принимает МЛВ, а СВ дополнительно с помощью блока настройки по выбранному ранее алгоритму вырабатывает сигналы адаптации. Такие ИСУ относятся к классу адаптивных систем.
При необходимости вмешательства оператора в процесс функционирования ИСУ или в процесс управления СВ через блок интерфейса с пользователем может изменять и/или дополнять содержимое БД и БЗ, тем самым корректируя задающие воздействия, вырабатываемые блоками настройки и функционирования СВ. Такие ИСУ относятся к классу обучаемых человеко-машинных систем.
В ряде случаев МЛВ ИСУ может выбирать такие алгоритмы управления и/или адаптации, которые требуют при выработке задающих воздействий сравнения сигналов из СИИС с сигналами из имитационной модели (ИМ) ОУ. В этом случае ЭР дополняется блоком имитационного моделирования, связанного с остальными блоками ЭР и СИИС. Такие ИСУ относятся к классу систем управления с имитационными моделями в контуре управления.
Наконец, наиболее функционально полной ИСУ является структура, ЭР дополнительно снабжен анализатором (А) последствий принятия решения, который анализирует последствия управляющих воздействий на ОУ, сравнивает их с реакциями блока ИМ на такие же воздействия, а в ряде случаев и с реакцией оператора, и по результатам анализа корректирует БЗ и/или БА, а иногда и БД. Такие ИСУ относятся к классу самообучающихся систем.
Управление живучестью наиболее полно используется в интеллектуальных системах.
К основным принципам, которые могут использоваться в ИСУ для регулирования живучестью, относятся: адаптация, динамический естественный отбор или горячее резервирование, стресс, компенсация и заимствование, ступор или включение аварийного режима.
Принцип адаптации традиционно используется как в живых организмах, так и в управляемых системах для обеспечения приспосабливаемости к изменяющимся внешним условиям функционирования [4].
ИСУ, как и любая целеустремленная система, формирует поведение Y(t), исходя из заложенной при проектировании в память ИСУ генетической программы Ur, обеспечивающей функционирование системы, исходя из внутреннего текущего состояния системы X(t) и изменяющихся во времени внешних воздействий со стороны окружающей среды, в том числе действий оператора FJ):
![]() .
.
Кроме того, поведение любой ИСУ корректируется за счет гибкой реакции на изменяющиеся во времени внешние условия и внутреннее состояние. Появляющиеся при этом отклонения Y(t) в поведении формируются в основном за счет выявления отклонений от прогнозируемых внешних воздействий F(t) и внутреннего текущего состояния X(t), а в ряде случаев и за счет выявления нарушений (сбоев и повреждений) генетических программ Ur:
Y(t)
=
f(![]() ).
).
Наиболее
изученной и часто встречающейся задачей
управления живучестью является
адаптация, когда
Ur(t)
отсутствует,
X(t)
—
минимально,
а
F(t)
— максимально из-за нестационарности
среды, ее активного противодействия
или из-за вмешательства оператора в
процесс функционирования. В этом случае
можно считать, что
Y(t)
=f(![]() )
и сигналом
для включения механизма адаптации
служит наблюдаемое превышение сверх
допустимых норм изменений внешней
среды:
F(t)
>
)
и сигналом
для включения механизма адаптации
служит наблюдаемое превышение сверх
допустимых норм изменений внешней
среды:
F(t)
> ![]() .
.
Принцип
горячего резервирования, аналогичный
динамическому естественному отбору,
существующему в живых организмах,
также традиционно используется в
системах управления для обеспечения
живучести при отклонениях внутреннего
состояния системы из-за различных
поломок и отказов. Задача обеспечения
живучести или надежности функционирования
системы, когда
Ur
отсутствует,
влияние отклонений окружающей среды
F(t)
минимально, а
отклонение внутреннего состояния
Х(t)
максимально, т. е. когда можно считать,
что
Y(t)=f(![]() )
поставлена
достаточно давно и в значительной
степени изучена [5].
)
поставлена
достаточно давно и в значительной
степени изучена [5].
Сигналом для включения механизма динамического естественного отбора, т. е. переключения каналов и блоков на резервные, служит наблюдаемое превышение сверх допустимых норм изменений внутреннего состояния: X(t) > xдоп.
Принцип
стресса, аналогичный стрессу у человека,
используется в ИСУ для управления
живучестью сравнительно недавно.
Подобная задача управления живучестью
функционирования системы возникает,
когда отклонениями в изменениях
окружающей среды
F(t)
и внутреннего
состояния ![]() можно
пренебречь, а отклонения в поведении
определяются в основном изменениями,
сбоями генетических программ
можно
пренебречь, а отклонения в поведении
определяются в основном изменениями,
сбоями генетических программ ![]() .
.
Включение
механизма стресса приводит к переводу
системы в резервный режим, при котором
качество функционирования системы
и (или) ее надежность резко уменьшаются,
например, падает точность, энергетический
ресурс, ослабевают усилия неперемещения
и т. п., но система в целом продолжает
целеустремленно функционировать.
Поэтому очень важно правильно
определять моменты включения этого
механизма, т. е. четко выявлять
Ur(t)
в процессе
функционирования и ![]() в процессе
проектирования.
в процессе
проектирования.
Принцип
компенсации и заимствования, когда
после анализа изменения поведения
Y(t)
для обеспечения живучести системы
производится подключение к внешним
источникам ресурсов, например к внешним
базам данных, источникам питания и
др., в неавтоматическом режиме, т. е.
операторами, используется давно [6].
Такая задача обеспечения живучести
функционирования системы возникает,
когда изменения
U.
отсутствуют,
а изменения
F(t)
и
K(t)
выходят за
информационные диапазоны и не могут
быть компенсированы за счет собственных
ресурсов. В этом случае можно считать,
что
Y(t)
= f(![]() )
и сигналом для включения механизма
компенсации и заимствования служит
наблюдаемое изменение поведения
сверх допустимых норм
Y(t)
>
)
и сигналом для включения механизма
компенсации и заимствования служит
наблюдаемое изменение поведения
сверх допустимых норм
Y(t)
> ![]() ,
превышающих внутренние ресурсы. Включение
этого режима связано со значительными
затратами, потерей автономности
функционирования, а также с ухудшением
ряда существенных характеристик,
например, быстродействия, мобильности
и др. Поэтому очень важно правильно
выявлять моменты наступления ситуации
включения механизмов компенсации и
заимствования.
,
превышающих внутренние ресурсы. Включение
этого режима связано со значительными
затратами, потерей автономности
функционирования, а также с ухудшением
ряда существенных характеристик,
например, быстродействия, мобильности
и др. Поэтому очень важно правильно
выявлять моменты наступления ситуации
включения механизмов компенсации и
заимствования.
Принцип
ступора или включения аварийного режима
может использоваться в ИСУ для обеспечения
живучести подобно тому, как это происходит
у человека при бредовом состоянии [7].
Такая задача управления живучестью
системы возникает, когда отклонения
в изменениях окружающей среды
и
внутреннего состояния
превышают информационные диапазоны и
одновременно наблюдаются сбои
генетических программ ![]() т.
е.
т.
е.
![]()
В
этом случае система после анализа
![]() начинает
игнорировать некоторую информацию
или ее преднамеренно искажает из-за
наличия сбоев
начинает
игнорировать некоторую информацию
или ее преднамеренно искажает из-за
наличия сбоев ![]() ,
но добивается
выполнения основной цели генетической
программы — продолжения жизненного
цикла, несмотря на резкое ухудшение
качества функционирования и отказ
от менее жизненно важных функций.
Например, система становится очень
медленно действующей, ослабевают усилия
на перемещения, система отказывается
от некоторых перемещений и т. п. При
ступоре тенденциозен не только отбор,
но и переработка информации, что
выражается, в частности, в крайней
избирательности извлечения информации
из памяти. Обычно этот режим возникает
при существенных изменениях внутреннего
состояния
и
значительных сбоях генетических программ
.
,
но добивается
выполнения основной цели генетической
программы — продолжения жизненного
цикла, несмотря на резкое ухудшение
качества функционирования и отказ
от менее жизненно важных функций.
Например, система становится очень
медленно действующей, ослабевают усилия
на перемещения, система отказывается
от некоторых перемещений и т. п. При
ступоре тенденциозен не только отбор,
но и переработка информации, что
выражается, в частности, в крайней
избирательности извлечения информации
из памяти. Обычно этот режим возникает
при существенных изменениях внутреннего
состояния
и
значительных сбоях генетических программ
.