

т
A
V
R
Т
Р
Кр
Кi
КD
950
-10
25
30
2
80
1990,1202
2100,40
554,1989
950
-5
25
50
5
100
2671,875
2548,69
607,7947
950
5
10
50
-2
20
360.35937
350,29
85,12347
1040
-10
25
"100
2
60
1873,8739
1911,41
487,4242
1040
-5
25
100
0
20
908,85273
1110,83
339,4255
1150
-10
25
100
2
40
1884,7843
1919,75
488,8416
800
0
15
50
5
20
1124,3386
1016,04
229,5431
870
-10
15
30
-2
100
3079,834
2263,08
415,7298
1150
10
5
30
2
20
790,55533
502,11
79,7263
870
-10
15
30
2
20
6138,3543
3796,65
587,0682
870
-5
10
50
-2
0
2190,6676
1356,00
209,8359
950
5
15
30
2
100
8262,6343
4744,97
681,2221
Окончание табл. 5.3
Протестируем разработанную систему в различных режимах. На рис. 5.47—5.50 приведены примеры работы системы в зависимости от изменения коэффициента сцепления с дорогой.
Рис.
5,47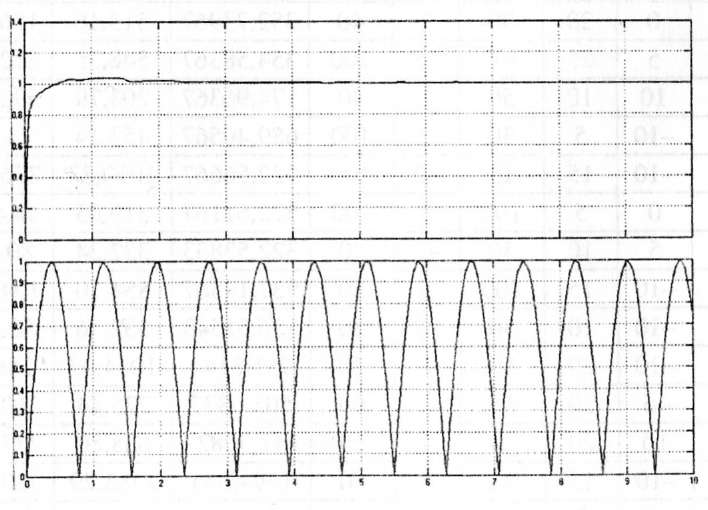
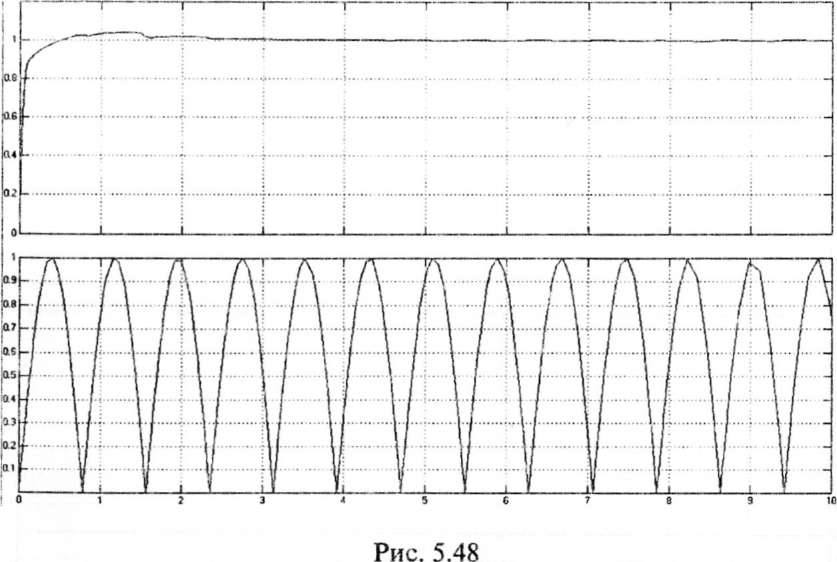
Рис.
5.50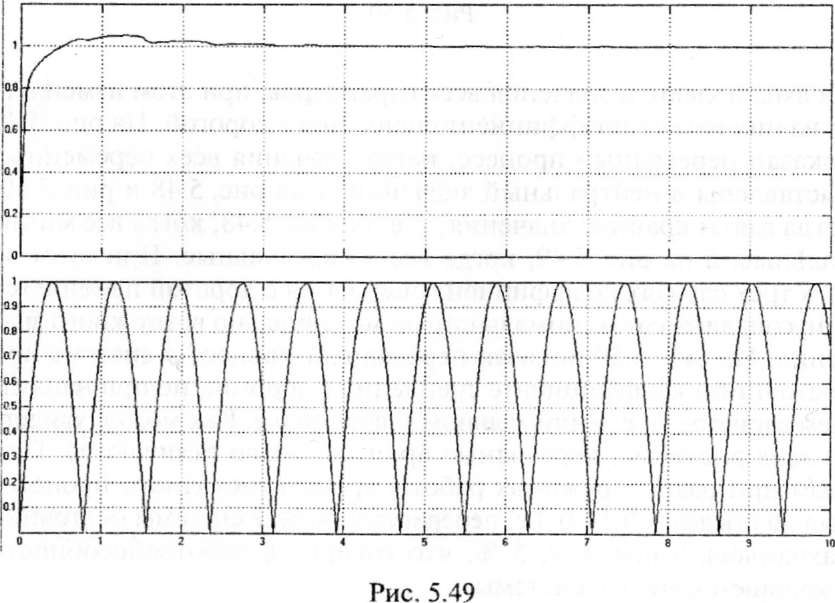
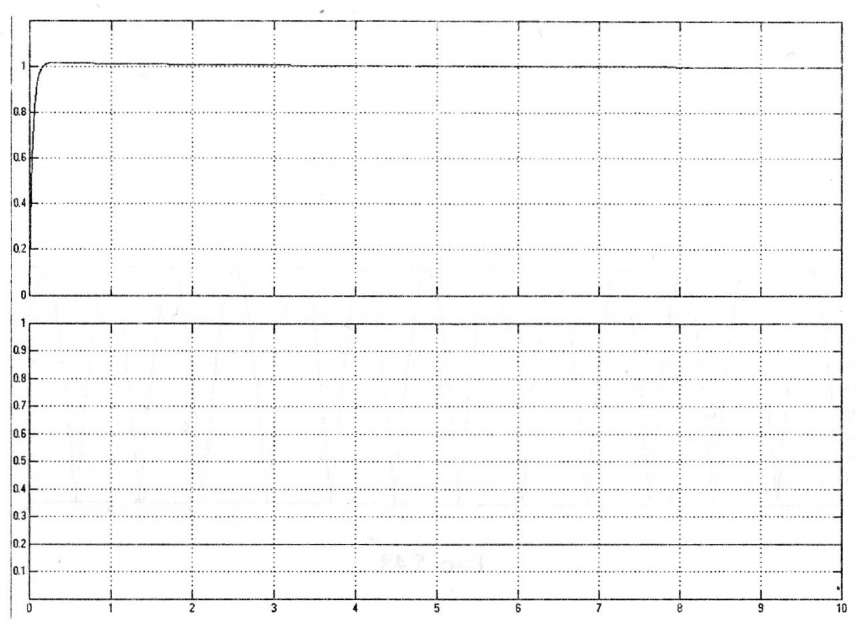
На вход подаются значения всех параметров, при этом изменяется из них только коэффициент сцепления с дорогой. На рис. 5.47 показан переходный процесс, когда значения всех переменных выставлены в нейтральный значения, а на рис. 5.48 и рис. 5.49, когда взяты крайние значения, т. е. на рис. 5.48, когда все минимальные, а на рис. 5.49, когда все максимальные. При этом во всех трех случаях коэффициент сцепления с дорогой изменяется синусоидально от минимального до максимально возможного значения. На рис. 5.50 показан переходный процесс в системе при постоянном коэффициенте сцепления с дорогой, но при наихудшем варианте, т. е. минимальном значении 0,2. Как можно увидеть из этих рисунков, переходные процессы мало отличаются. При этом при разных режимах работы время переходного процесса было в пределах 0,3—0,4 с, перерегулирование системы постоянно находилось в пределах 5 %, что говорит о работоспособности и хорошем качестве системы.
Полученные результаты подтверждают целесообразность использования нечеткой системы управления движением автомобиля, так как она улучшает управляемость транспортного средства.