

5Л. Микропроцессорная система управления электродвигателем
Пусть требуется разработать микропроцессорную систему управления электродвигателем транспортного средства массой 500 кг, способного двигаться со скоростью v = 60 км/час.
Для решения поставленной задачи необходимо прежде всего подобрать электродвигатель и оценить динамические свойства объекта управления (ОУ).
Положим, что сила трения равна примерно
![]()
где кт— коэффициент трения (сцепление с дорогой), m — масса транспортного средства, g— ускорение свободного падения.
Коэффициент редукции
определим из следующего соотношения:![]()
![]()
где Wдв max — максимальная угловая скорость ротора двигателя.
Положим, что выбираемый двигатель будет иметь частоту вращения n = 1500 об/мин. Тогда:
Зная коэффициент
редукции, радиус колеса и силу трения,
можно найти момент, который должен
развивать двигатель.

![]()
Таблица 5.1

Для оценки динамических свойств ОУ рассмотрим линеаризованные уравнения выбранного электрического двигателя постоянного тока с независимым возбуждением. Так как обмотка возбуждения двигателя создает постоянный магнитный поток, управление осуществляется изменением электродвижущей силы источника в якорной цепи e(t). Внутренним сопротивлением источника пренебрегаем. Входными воздействиями считаем e{t) и приведенный момент нагрузки на валу двигателя M(t). Выходами системы считаем угол поворота ротора a(t), угловую скорость ротора w(?) и ток в якорной обмотке i(t). Тогда динамику системы можно описать следующими уравнениями:
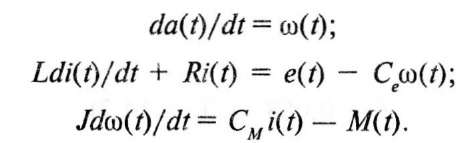
Здесь обозначены: L, R- индуктивность и активное сопротивление якорной цепи (T= L/R), J— приведенный момент инерции ротора, Сe , Cw — постоянные, зависящие от конструк
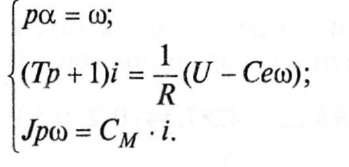
тивных параметров двигателя и величины потока возбуждения. Если положить момент нагрузки постоянным, то используя преобразование Лапласа, для малых отклонений от состоянии равновесия получаем:
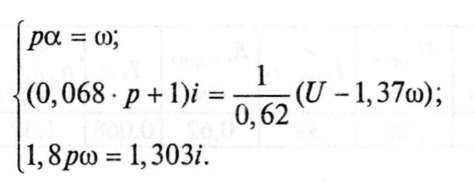
Полагая, что J= Jpот + ткR2/Kpeд = 0,3 + 20 . 0,22/0,53 = 0,3 + +1,5 = 1,8, для выбранного двигателя, получаем:
Произведем оценку быстродействия ОУ по логарифмической амплитудной частотной характеристике (JIA4X) двигателя (см. рис. 5.1). Для чего представим его следующей структурной схемой, которая соответствует последней системе уравнений.
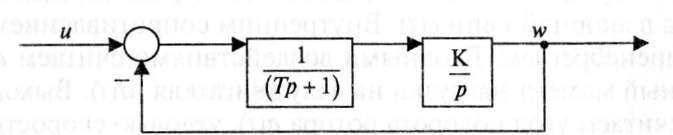
Рис.
5.1. Структурная схема объекта управления
При этом
![]()
И
![]()
которой соответствует структурная схема, показанная на рис. 5.1, и ЛАЧХ, показанная на рис. 5.2.
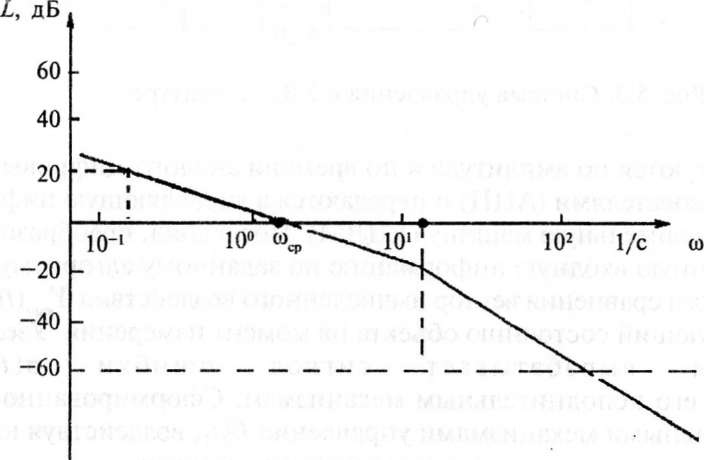
Рис. 5.2. ЛАЧХ двигателя
Как видно из рис. 5.2, двигатель имеет частоту среза шср = = K= 1,6 1/с, которая и определяет минимально допустимое быстродействие, требуемое от элементов цифровой системы управления (АЦП, ЦАП, процессора и др.).
В классической теории управления техническими объектами рассматривают различные варианты схем систем управления с УВМ в контуре. Наиболее типичный вариант схемы представлен на рис. 5.3.
и передаточная
функция разомкнутой системы будет
иметь вид
![]()
Рис. 5.3. Система
управления с УВМ в контуре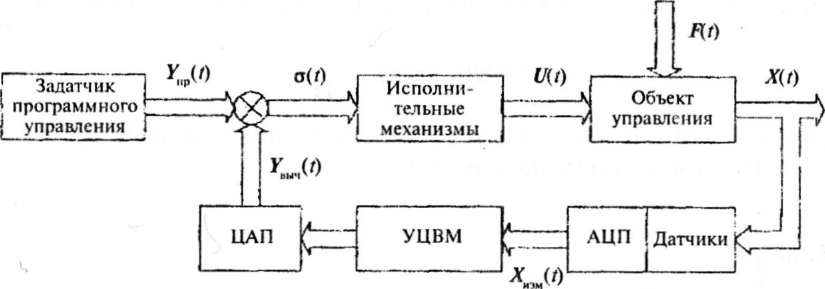
затем квантуются по амплитуде и по времени аналого-цифровыми преобразователями (АЦП) и передаются в управляющую цифровую вычислительную машину (УЦВМ). Последняя, преобразовав измеренную входную информацию по заданному алгоритму, подает на узел сравнения вектор вычисленного воздействия Yвыч(t), соответствующий состоянию объекта на момент измерения. Узел сравнения вырабатывает сигнал ошибки a(t) и передает его исполнительным механизмам. Сформированное исполнительными механизмами управление U(t), воздействуя на объект, возвращает его на программную траекторию.
Для взаимодействия УЦВМ с исполнительными устройствами необходимо наличие в системе цифроаналоговых преобразователей (ЦАП).
Очевидно, что УЦВМ, включенная в контур рассмотренной системы управления, должна удовлетворять следующим требованиям:
осуществлять возложенные на нее вычисления с точностью, позволяющей системе нормально выполнять свои функции;
проводить обработку входной информации в темпе работы системы. Иначе говоря, УЦВМ должна выдавать результаты |с требуемой точностью и работать в реальном масштабе времени, т. е. работать под управлением операционной системы реального времени (ОС PB).
Для выбора преобразователей (ЦАП и АЦП) требуется знать два основных параметра: минимальное число разрядов и быстродействие.
Для расчета числа
разрядов п воспользуемся требованиями
к точности системы. Тогда при заданной
точности 0,5 % получим:
![]()
Видно, что для выполнения условия по точности системы достаточно 8 разрядов преобразователя.
Быстродействие преобразователей должно соответствовать быстродействию объекта управления. В рассматриваемом случае время преобразования должно быть не более чем tk = 1/10 wcp =
= 1/10-1,6 = 0,06 с.
Очевидно, что и время вычисления управляющего воздействия контроллером УЦВМ не должно превышать полученное значение tk = 0,06 с. При этом функцию вычисления сигнала ошибки a(t) может выполнять тот же контроллер. Тогда структурную схему системы управления можно представить в виде, показанном на рис. 5.4. После ЦАП необходимо установить усилитель У, чтобы обеспечить подачу на двигатель напряжения до 220 В, так как на выходе ЦАП обычно не более 10—12 В.
Исходя из выявленных требований к числу разрядов и быстродействию в качестве АЦП в системе можно использовать, например, модуль А116-5А
\
Рис. 5.4. Структурная
схсма системы управления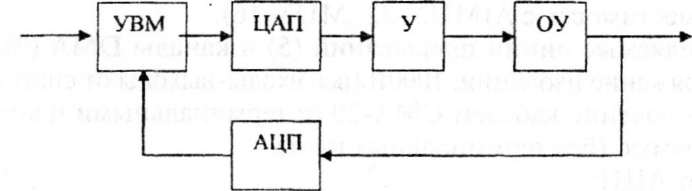
Основные характеристики:
16 однопроводных или 8 дифференциальных входов (программируемый тип подключения входов);
14-разрядный АЦП (AD7894-10).
Программируемый коэффициент усиления по любому входу (хранится в регистре):
1, 2, 4, 8 (диапазон I, PGA206);
1,10,100,10001 (диапазон II, PGA204).
Диапазоны входных напряжений/токов (с учетом усиления):
диапазон I: ±10 В; ±5 В; ±2,5 В; ±1,25 В;
±80 мА; ±40 мА; ±20 мА; ±10 мА
диапазон И: ±10 В; ±1 В; ±0,1 В; ±0,01 В;
±80 мА; ±8 мА; ±0,8 мА; ±0,08 мА.
Защита от перенапряжения (ADG439F): —35/+50 В.
Пропускная способность (по DMA или при работе с FIFO):
100000 выборок в секунду (для диапазонов I)
40000/33000/7500/800 выборок в секунду (для диапазона II)
Входное сопротивление: >10 M (напряжение).
Аппаратное усреднение 2, 4, 8, 16 выборок.
Случайная погрешность измерения без усреднения: ±2 МЗР.
Случайная погрешность измерения с усреднением: ±0,5 МЗР
FIFO (CY7C429).
Авто-сканирование входов и выходов.
2 однопроводных выхода (AD7249 + AD6941).
12-разрядная точность.
Диапазон (установка перемычками):
0-5 В; ±5 В; 0-10 В;
0-20 мА; 4-20 мА; 1
Таймер: 16-бит (1 мс или 10 мс).
Цифровые выходы: 8 (время установки 1,6 мс)
(совместимость с AIMUX-32, MUX-16).
Разделяемые линии прерываний (5) и каналы DMA (2). Напряжение изоляции: 1000В (все входы-выходы от системы). Подключение кабелем СМА-20 (с терминальными платами) или напрямую (без терминальных плат).
Старт АЦП:
программный;
аппаратный (от таймера).
Считывание из АЦП:
опрос (ADC ready, FIFO/SRAM full);
по прерыванию (ADC ready, FIFO/SRAM full);
по каналу DMA (ADC ready).
Напряжение питания +5 В ± 5 %.
Ток потребления по +5 В до 400 мА.
Рабочий температурный диапазон —40...+85 °С.
Температура хранения —55 ... +90 °С.
Относительная влажность воздуха 95 % при +25 °С.
Среднее время наработки на отказ 100 000 часов.
Аналогично, в качестве ЦАП в системе можно использовать, например, модуль AO-16.
Модуль АО-16 выполнен в стандарте Micro PC и предназначен для преобразования 12-разрядных цифровых кодов в аналоговые сигналы напряжения или тока. Все аналоговые выходы изолированы от системы и имеют общий изолированный источник питания (групповая изоляция).
Основные характеристики модуля:
количество аналоговых выходов напряжения и/или тока16;
время установления аналоговых выходов для всего диапазона 10 мкс (напряжение), 20 мкс (ток);
скорость цифроаналогового преобразования для одного канала 100000 выб./с;
скорость цифроаналогового преобразования для N каналов 100000/W выб./с;
диапазоны выходных напряжений: ± 5; 0-5; 0-10; ± 10В;
диапазон выходных токов: 0—20; 4-20 мА;
нагрузка для выходов напряжения 2 кОм;
нагрузка для выходов тока 150 Ом;
2 выхода УНЧ 1 Вт на нагрузке 8 Ом;
FIFO выборок 1024 слов (2048 байт);
16 изолированных цифровых выходов (установка 10 мкс);
16-разрядный таймер с внутренней частотой: 100 кГц, 1 мГц;
5 разделяемых линий аппаратных прерываний IRQ [7—3];
2 линии запросов канала DMA DRQ 1/3;
групповая оптоизоляция от системы 1000 В;
напряжения питания 5 В ±5 %.
Максимальный ток потребления по +5 В:
для конфигурации Vl 6 — 550 мА;
для конфигурации V8 — 350 мА;
для конфигурации С16 — 620 мА;
для конфигурации С8 — 390 мА.
Рабочий температурный диапазон -40 ...+85 °С.
Температура хранения —55. ..+85 °С.
Влажность 95 % при температуре +25 °С.
Среднее время наработки на отказ 100 000 ч.
Подсоединение аналоговых выходов модуля производится кабелем СМА-20 (2) через вилки J2, J3 (для подключения под винт или зажим, дополнительно требуются терминальные платы типа ТВ-20). Аналоговые сигналы подключаются одним проводом к соответствующим контактам. Подключение цифровых выходов DGT [15—0] осуществляется кабелем СМА-26 через разъем J4.
В качестве контроллера можно использовать, например, модуль центрального процессорного устройства CPU 686Е (рис. 5.5).
Составные части CPU 686Е:
процессор Geode GXl-300, имеющий 32-битовое ядро, 64-битовый арифметический сопроцессор, 64-битовую шину памяти, кэш-память 1-го уровня размером 16 кбайт;
чипсет СХ5530, содержащий видеоконтроллер с аналоговым и цифровым RGB выходом, IDE контроллер, контроллер USB и звука;
оперативное запоминающее устройство, имеющее синхронную динамическую память (SDRAM) размером 32/ 128 Мбайта;
постоянное запоминающее устройство (FLASH BIOS), имеющее для хранения базовой системы ввода-вывода микросхему FLASH памяти размером 512 кбайт, для хранения операционной системы, кодов программ и долговременной информации в модуле микросхему FLASH памяти размером 8 Мбайт с поддержкой файловой структуры;
видеопорт, позволяющий подключать аналоговые ЭЛТ-мониторы;
Рис. 5.5. Плата
контроллера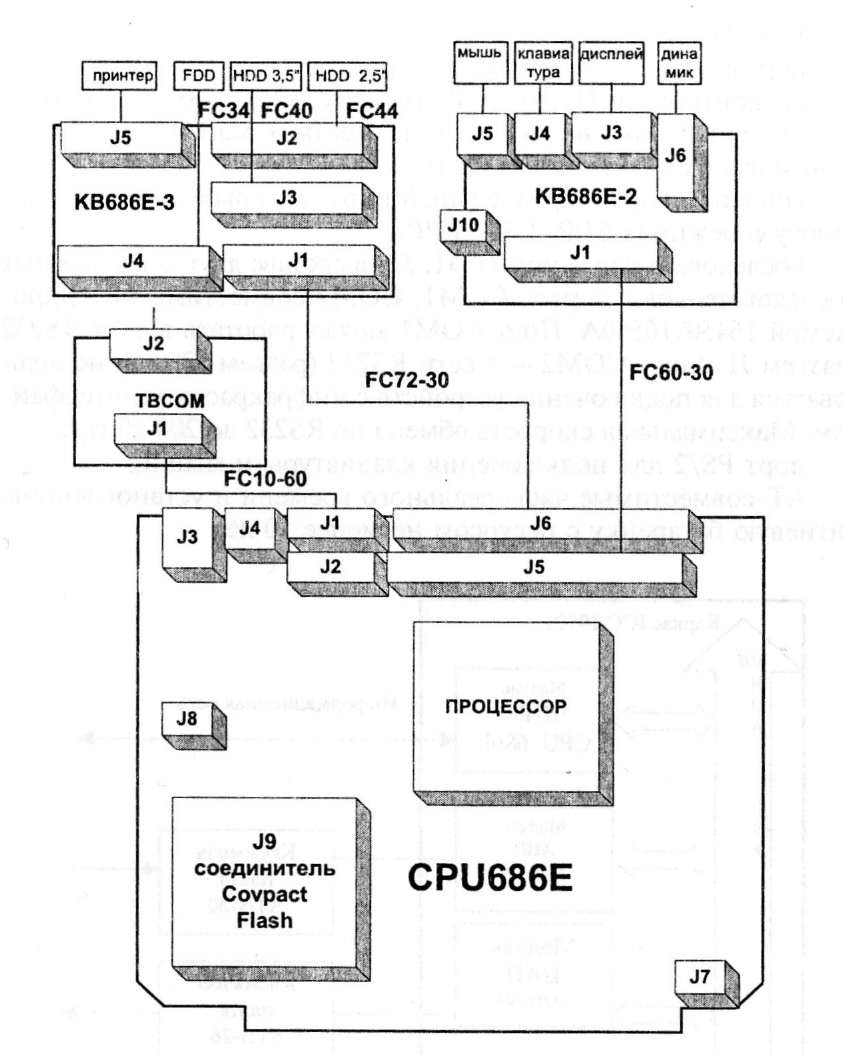
контроллер Ethernet обеспечивает подключение к сети Ethernet 10\100 Base-T стандарта IEEE 802,3 через разъем RG-45, в котором установлены два стандартных разъема для подключения устройств с интерфейсом USB;
FLASH-диск;
порт для подключения IDE устройств, который имеет встроенный контроллер IDE-устройств модуля CPU 6S6E, позволяющий подключать накопители на жестких магнитных дисках и оптических дисках (CD ROM);
универсальный параллельный порт, который поддерживает работу в режимах SPP, ESP, ЕРР;
последовательные порты (J1, J2) в составе двух асинхронных последовательных портов СОМ1, COM2 совместимых с микросхемой 16450\16550А. Порт COMl может работать в сети RS232 (разъем Jl), порт COM2 — в сети RS232 (разъем J2) или использоваться для подключения устройств с инфракрасным интерфейсом. Максимальная скорость обмена по RS232 до 200 кбит/с; порт PS/2 для подключения клавиатуры и мыши;
АТ-совместимые часы реального времени и установленную литиевую батарейку с ресурсом не менее 10 лет.
Рис.
5.6. Схема
УВМ
Последовательное перепрограммируемое постоянное запоминающее устройство (SEPROM), которое используется для хранения резервной копии параметров конфигурации модуля CPU 686Е. Запись в SEPROM производится автоматически после изменения параметров, CMOS. Загрузка параметров из SEPROM производится также автоматически при неисправности или отсутствии литиевой батарейки.
Супервизор, отслеживающий сбои напряжения питания и сторожевой таймер (WDT) с фиксированным временем срабатывания 1,6 с. Супервизор формирует сигнал RESET при понижении напряжения питания от уровня 3,3 В ниже 3 В, а также NMI при понижении напряжения питания 5 В ниже 4,75 В. Сторожевой таймер также формирует сигнал сброса RESET и может использоваться для исключения программных зависаний. Активизация, сброс и блокирование WDT осуществляются программно.
Модуль удаленного сброса и прерывания, имеющий два дискретных изолированных входа с активным уровнем от 4 до 12 В, которые могут быть использованы для формирования внешнего сброса и прерывания процессора.
Технические характеристики CPU 686Е:
производительность Р55С-250;
питание 5В+-5 %, ток потребления 2 А без внешних устройств;
диапазон рабочих температур от —40 до +70 °С;
диапазон температур хранения от —55 до +85 °С;
относительная влажность до 95 % без конденсации;
среднее время наработки на отказ не менее 100 ООО ч.
Схема подключения внешних устройств к модулю контроллера приведена на рис. 5.6.
УВМ должна выдавать результаты с требуемой точностью и работать в реальном масштабе времени. Работа УВМ в реальном масштабе времени обеспечивается операционной системой реального времени (ОС PB), являющейся фундаментом базового программного обеспечения любой ЭВМ. ОС PB должна обеспечивать полный цикл жизни программного обеспечения: создание текста программы, ее компиляцию, построение, отладку, исполнение и сопровождение. Требования, которым должны удовлетворять любые ОС PB, изложены в стандарте POSIX 1003.4 (Real Time Extensions for Portable Operating Systems) рабочего комитета IEEE, утвержденном ISO/IEC как международный стандарт 9945.
В настоящее время известно несколько десятков ОС PB, более половины имеют поддержку архитектуры процессоров Intel х86. К широко известным и имеющим многочисленные внедрения и дилерскую поддержку в России можно отнести следующие ОС PB:
VxWorks, разработчик Wind River Systems;
QNX, разработчик QNX Software Systems Ltd;
OS-9, разработчик Microware Systems Coip.;
RTOS-32, разработчик On Time Software;
RTX for Windows NT and Windows СЕ, разработчик VenturCom;
Windows CE и Windows NT Embedded, разработчик Microsoft Corp.
Все OC PB имеют поддержку языка С, как основного языка разработчиков систем реального времени, и библиотеки графических функций для создания удобного пользовательского интерфейса для устройств отображения. Некоторые ОС PB, например QNX, имеют встроенные графические оболочки.
Для систем реального времени важным параметром является размер системы исполнения, а именно суммарный размер минимально необходимого для работы приложения системного набора (ядро, системные модули, драйверы и т. д.). Например, размер ядра операционной системы реального времени OS-9 на микропроцессорах МС68ххх — 22 кбайт, QNX — 20 кбайт VxWorks — 16 кбайт. Другим важным свойством ОС PB является возможность исполнения системы из ПЗУ. Оно позволяет создавать компактные встроенные системы реального времени повышенной надежности, с ограниченным энергопотреблением, без внешних накопителей.
Кроме того, одним из главных вопросов, который приходится решать при выборе ОС, является стоимость. Недорогими являются 0S9, QNX.
В качестве ОС PB для УВМ в рассматриваемом случае можно выбрать операционную систему QNX 6.1, так как она.
соответствует требованиям системы управления;
совместима с выбранными аппаратными средствами;
распространяется бесплатно;
имеет региональную дилерскую поддержку.
В связи с тем что ОУ рассматриваемой системы управления имеет следующую передаточную функцию:
представляется
целесообразным при вычислении в
контроллере управляющего воздействия
u(t)
по
сигналу ошибки а(/) использовать
пропорционально, интегрально,
дифференциальный (ПИД) закон управления:
при
соблюдении условий:
![]()
![]()
Проведем исследование полученной цифровой системы управления с помощью пакета Simulink в программной среде MATLAB для того, чтобы убедится в том, что разработанная система обеспечивает требуемое качество управления.
Представим всю систему в виде структурной схемы (рис. 5.7).
В
системе
При
этом положим, что![]()
K2 = 1 (для упрощения расчетов).
Рис.
5.7. Структурная схема системы управления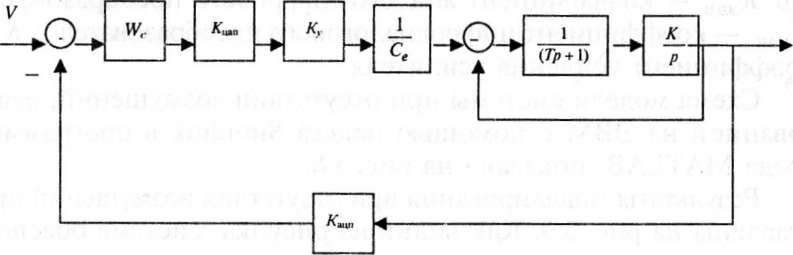
Тогда
![]()
и
Рассмотрим
остальные параметры схемы:
![]()
где
— максимальная
угловая скорость ротора двигателя![]()
![]()
Тогда

где Кацп — коэффициент аналого-цифрового преобразователя; Kцап — коэффициент цифроаналогового преобразователя; Ky — коэффициент усиления усилителя.
Схема модели системы при отсутствии возмущений, реализованной на ЭВМ с помощью пакета Simulink в программной среде MATLAB, показана на рис. 5.8.
Результаты моделирования при отсутствии возмущений представлены на рис. 5.9. Как видно из рисунка, система обеспечивает хорошее качество управления скоростью при отсутствии возмущений.

Рис.
5.9. График переходного процесса при
отсутствии возмущений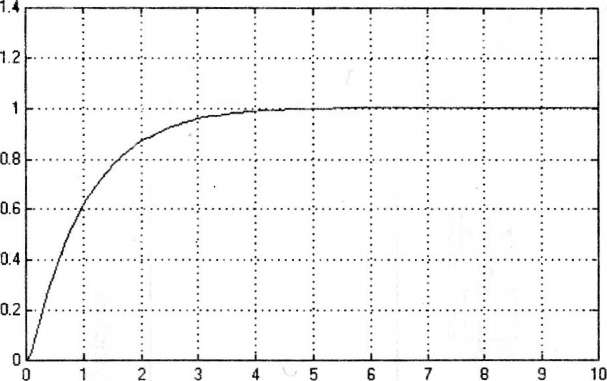
![]() где
где
![]()
![]() — угол наклона дороги и
— угол наклона дороги и
![]() — коэффициент трения. При этом в
компьютерной модели добавятся блоки,
моделирующие момент сопротивления,
вычитающийся из вращаюшего момента, и
схема примет вид, показанный на рис.
5.10.
— коэффициент трения. При этом в
компьютерной модели добавятся блоки,
моделирующие момент сопротивления,
вычитающийся из вращаюшего момента, и
схема примет вид, показанный на рис.
5.10.
Результаты
моделирования при
![]() = 0,16 рад/с
представлены на рис. 5.11, при
= 0,08 рад/с — на рис. 5.12 и при
= 0,008 рад/с — на
рис. 5.13.
= 0,16 рад/с
представлены на рис. 5.11, при
= 0,08 рад/с — на рис. 5.12 и при
= 0,008 рад/с — на
рис. 5.13.
Из рисунков видно, что при высокой скорости движения и/или большой неравномерности профиля дороги неизменная настройка параметров закона управления (k1, k2, k3) или, что то же, регулятора скорости (Wc(p)) желаемого качества управления достичь не удается. Это говорит о том, что необходимо использовать комбинированное управление (по отклонению и по возмущению), либо — адаптивное.
К аналогичным результатам можно было бы прийти и при моделировании воздействия изменения коэффициента трения, например, из-за изменения покрытия дороги (асфальт, грунт, щебенка), температуры, влажности и других факторов. При этом прямое измерение коэффициента фения практически невозможно.


Поэтому учет указанных факторов в системе управления возможен только в виде логико-лингвистических или вероятностных переменных, что делает всю систему управления нечеткой.