

Федеральное агентство по образованию
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ В ПОЛИТЕХНИЧЕСКОМ УНИВЕРСИТЕТЕ
Выпуск 1
А.Е. ГОРОДЕЦКИЙ В. В. КОЗЛОВ Ю.Н. АРТЕМ ЕМКО ИЛ. ТАРАСОВА
ВЫЧИСЛЕНИЯ В СИСТЕМАХ УПРАВЛЕНИЯ
Рекомендовано Учебно-методическим объединением по университетскому политехническому образованию в качестве учебного пособия для студентов высших учебных заведений, обучающихся по направлению подготовки 220100 "Системный анализ и управление"
Санкт-Петербург Издательство Политехнического университета 2006
УДК 681.3 (075.8) ББК 32.818я73 Г 701
Рецензенты: Член-корреспондент РАН, профессор СПбГПУ Ю.М. Смирнов Доктор технических наук, профессор В.В. Александров (СПИИ РАН)
Городецкий А. Е., Козлов В. В., Артеменко Ю.Н., Тарасова И.Л. Вычисления в системах управления: Учеб. пособие. СПб.: Изд-во Политехи, ун-та, 2006. 464 с. (Информационные технологии в политехническом университете. Вып. 1).
ISBN 5-7422-1275-5
Пособие соответствует авторским курсам дисциплин "Управляющие ЭВМ и комплексы" и "Интегрированные системы автоматизации научно-производственной деятельности" направления магистерской подготовки 220100 "Системный анализ и управление".
Изложены вопросы организации вычислений в системах управления. Главное внимание уделено проблемам вычислений в режиме реального времени и параллельным вычислениям. Проведен анализ различных архитектур вычислительных устройств с операционными системами реального времени. Даны примеры применения различных вычислительных устройств в системах управления. Описаны средства интеллектуализации и оптических вычислений. Рассмотрены вопросы развития нано- и молекулярных вычислительных средств.
Предназначено для студентов высших учебных заведений, обучающихся по направлению магистерской подготовки 220100 "Системный анализ и управление". Может быть использовано также для студентов и аспирантов, специализирующихся в области цифровых систем управления и информатики.
Табл. 11. Ил. 192. Библиогр.: 69 назв.
Печатается по решению редакционно-издательского совета Санкт- Петербургского государственного политехнического университета.
© Городецкий А.Е., Козлов В.В., Артеменко Ю.Н., Тарасова И.Л., 2006 © Санкт-Петербургский государственный ISBN 5-7422-1275-5 политехнический университет, 2006
ОГЛАВЛЕНИЕ
Введение…………………………………………………………………………………...4
Глава 1. Цифровые системы управления ………………………………………….....7
Обобщенное описание задачи цифрового управления……………………....7
Объекты управления…………………………………………………………..16
Принципы цифрового управления.…………………………………………..21
Математические модели цифровых систем управления……………………34
Вычислительные методы решения задач оптимального управления……...50
Глава 2. Управляющие вычислительные системы………………………………….62
Обобщенное описание…………………………………………………………62
Математические модели вычислительных устройств………………………94
Микроконтроллеры и микро-ЭВМ………………………………………….109
Персональные вычислительные машины и суперкомпьютеры…………...131
2.5 Управляющие вычислительные комплексы………………………………...179
Глава 3. Управление с использованием нейронных сетей………………………....195
Обобщенное описание ………………...195
Классификация нейронных сетей ………………...202
Математические модели нейронных сетей ………………...212
Решение задач управления в нейросетевом базисе ………………...223
Гибридные нейронные сети ………………...260
Глава 4. Возможности повышения эффективности управляющих
систем ………………...275
Программные средства интеллектуализации ………………...275
Управляющие нейрокомпьютеры ………………...297
Нанокомпьютеры ……………..….337
Глава 5. Примеры применения вычислительных устройств в системах
управления ……………..….370
Микропроцессорная система управления электродвигателем .. ……...…...370
Нечеткая адаптивная система управления скоростью движения
автомобиля…………………………………………………………………...…….389
Нечеткая система управления углом поворота автомобиля…………...…..420
Управляющий вычислительный комплекс радиотелескопа РТ-70………..435
Библиографический список ………………....460
ВВЕДЕНИЕ
В последние годы вычисления играют все большую и большую роль в системах управления. Это объясняется прежде всего все возрастающей сложностью современных систем управления, для функционирования которых требуется не только вычислять традиционные скорости и ускорения, связанные со взятием производных и интегрированием, но и решать сложные задачи идентификации объектов управления и среды функционировании в условиях неполной информации, а также находить оптимальные управляющие воздействия в условиях ограниченности временных и вычислительных ресурсов и большой изменчивости окружающей среды.
Теория и практика применения средств вычислительной техники в системах управления в последнее время наталкиваются на предельные возможности ведения процесса управления в реальном времени с использованием традиционных вычислителей фон-неймановского типа. Это объясняется, во-первых, постоянным повышением к точности и скорости вычислений, а во-вторых — усложнением вычислительных задач. Последнее особенно характерно для интеллектуальных и человеко-машинных систем управления.
Достижения микроэлектроники и информатики стимулируют практическую реализацию многоядерных процессоров и суперкомпьютеров, обеспечивающих принципиально новые архитектуры и алгоритмы параллельных вычислений, а также переход на нано технологический уровень изготовления элементов вычислительных устройств.
Поскольку суперкомпьютеры, нейронные сети, нейрокомпьютеры и нанокомпьютеры занимают особое место среди управляющих вычислительных машин и в современных системах интеллектуального управления выполняют важнейшие вычислительные функции, этим вопросам в данной монографии уделяется наибольшее внимание.
Учебное пособие может быть рекомендовано для студентов старших курсов технических университетов, обучающихся по направлениям "Системный анализ и управление" и "Автоматизация и управление". Так же она может быть полезна и для студентов по направлению "Информатика и вычислительная техника", и поэтому первая глава пособия содержит основные сведения из теории цифрового управления. Пособие состоит из пяти глав.
В главе 1 даны элементы теории цифрового управления, включая описание принципов построения систем цифрового управления, анализ их математических моделей, рассмотрение приемов и методов анализа статических и динамических характеристик, а также методов синтеза систем управления с заданными свойствами. Особое внимание уделяется методам управления в условиях неопределенности.
В главе 2 приводится обобщенное описание управляющих вычислительных машин. Описываются математические модели блоков вычислительных машин, строящихся на основе конечных автоматов. Описываются особенности организации вычислительных процессов и архитектур современных микроконтроллеров, одноплатных микро-ЭВМ, персональных и суперкомпьютеров, а также вычислительных комплексов с анализом сетевых средств.
Глава 3 посвящена нейросетевому подходу к организации вычислений в системах управления. Проводится классификация нейронных сетей, описываются их математические модели. Подробно излагаются методы решения управленческих задач в нейросетевом базисе, в том числе и нечетких задач управления.
В главе 4 дан обзор методов повышения эффективности вычислений в сложных системах управления. Описываются современных программные средства интеллектуализации управления, управляющие нейрокомпьютеры. Анализируются возможности и пути создания управляющих нанокомпьютеров.
В главе 5 приводится ряд примеров применения вычислительных устройств в системах управления — от простейших контроллеров до сложных управляющих вычислительных комплексов. Изложение материала этой главы построено таким образом, чтобы его можно было использовать при выполнении курсовых работ по системам цифрового и интеллектуального управления.
Авторы выражают благодарность сотрудникам кафедры "Систем управления и информатики" СПбГУАП и кафедры "Интеллектуальных систем управления" СПбГПУ, а также профессору В. В. Дубаренко (Институт проблем машиноведения РАН) за ценные замечания и рекомендации, которые были учтены авторами при работе над рукописью, и заведующему кафедрой "Интеллектуальных систем управления" СПбГПУ члену-корреспонденту РАН Ю. М. Смирнову за помощь в работе над рукописью и при ее опубликовании.
Авторы
Глава 1
ЦИФРОВЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
1.1. Обобщенное описание задачи
цифрового управления
За время, прошедшее с момента, когда появилась первая ЭВМ, сменилось уже несколько поколений вычислительных машин. Менялись элементная база, конструктивные решения, языки программирования, программное обеспечение, но основы архитектуры, заложенные при создании машин первого поколения, практически без изменения перешли на машины последующих и успешно работают до настоящего времени. Нет сомнений, что идеи машин первого поколения еще послужат человеку. Однако все настоятельнее требуются системы, наделенные элементами интеллекта при обработке колоссального объема информации и в то же время работающие в темпе управляемых процессов. Наиболее ярким примером таких систем являются системы автоматического (и/или автоматизированного) управления (САУ) техническими объектами с ЭВМ в контуре. В классической теории управления техническими объектами рассматривают различные варианты схем систем управления с ЭВМ в контуре. Для лучшего понимания принципа их построения рассмотрим схему, представленную на рис. 1.1.
Система
работает следующим образом. Под действием
управления
U(t)
объект движется по заданной программой
траектории. Однако случайные,
неуправляемые возмущения
F(t)
отклоняют
его движение от заданного. Отдельные
компоненты вектора состояния объекта
![]() (t)
измеряются
датчиками, затем квантуются по амплитуде
и по времени аналого-цифровыми
(t)
измеряются
датчиками, затем квантуются по амплитуде
и по времени аналого-цифровыми
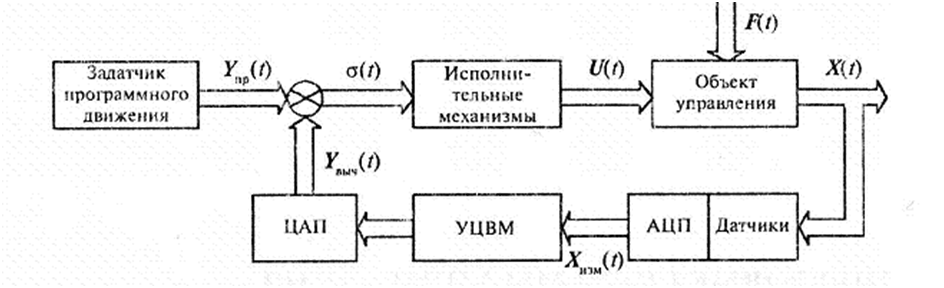
Рис. 1.1. Структура САУ с ЭВМ
преобразователями (АЦП) и передаются в управляющую вычислительную машину (УЦВМ). Последняя, преобразовав измеренную входную информацию по заданному алгоритму, подает на узел сравнения вектор вычисленного воздействия Yвыч(t), соответствующий состоянию объекта на момент измерения. Узел сравнения вырабатывает сигнал ошибки Ω(t) и передает его исполнительным механизмам. Сформированное исполнительными механизмами управление U(t), воздействуя на объект, возвращает его на программную траекторию.
Очевидно, что УВМ, включенная в контур рассмотренной системы управления, должна удовлетворять следующим требованиям:
осуществлять возложенные на нее вычисления с точностью, позволяющей системе нормально выполнять свои функции;
проводить обработку входной информации в темпе работы системы. Иначе говоря, УВМ должна выдавать результаты с требуемой точностью и работать в реальном масштабе времени.
Работа УВМ в реальном масштабе времени обеспечивается операционной системой реального времени (ОС РВ), являющейся фундаментом базового программного обеспечения любой ЭВМ. ОС РВ должна обеспечивать полный цикл жизни программного обеспечения: создание текста программы, ее компиляцию, построение, отладку, исполнение и сопровождение. Требования, которым должны удовлетворять любые ОС РВ, изложены в стандарте POSIX 1003.4 (Real Time Extensions for Portable Operating Systems) рабочего комитета IEEE, утвержденном ISO/IEC как международный стандарт 9945. Этот стандарт определяет операционную систему как систему реального времени (ОС РВ), если она обеспечивает требуемый уровень сервиса за вполне определенное, ограниченное время. Сказанное можно сформулировать таким образом, что ОС РВ должна быть предсказуема. Правильная, но запоздалая реакция системы на внешнее событие зачастую может быть просто гибельной, например, в системе безопасности атомной станции, системах управления воздушным транспортом и т. п. При этом важно не абсолютное время реакции системы, а то, что оно определено заранее. В системе управления прокатным станом время реакции системы должно быть в пределах нескольких миллисекунд, а в системе контроля над окружающей средой — несколько минут. Однако оба эти примера из области задач реального времени.
Современный уровень развития элементной базы вычислительной техники позволяет выполнять задатчик программного движения и узел сравнения в виде программных модулей, размещаемых в памяти той же УВМ, что и основной алгоритм обработки входной информации. В этом случае УВМ будет вырабатывать непосредственно сигнал ошибки и, очевидно, будет иметь большую вычислительную нагрузку. На рис. 1.2 представлена цифровая система управления с расширенными функциями УВМ.
Значительное повышение качества работы системы цифрового управления дает ее интеллектуализация. Систему управления можно назвать интеллектуальной (ИСУ), если она способна на основе заложенных в ней знаний и полученных извне

Рис. 1.2. Схема цифровой системы управления
сведений сформулировать программу движения объекта и найти способ оптимальной реализации этой программы. При этом резко возрастает объем вычислительных работ в ИСУ, и УВМ с последовательной архитектурой обычно не в состоянии его выполнить. Выход можно найти лишь в применении параллельных принципов организации обработки информации.
При синтезе систем управления одним из важнейших этапов является формализация описания объектов управления, среды функционирования, управляющих модулей и систем, а также целей управления. Процесс формализации обычно начинается с лингвистического описания задачи, построения систем логических уравнений, соответствующих поставленной и описанной лингвистической задаче и отражающих причинно-следственные связи между понятиями и отношениями, определение допустимых решений построенной системы уравнений и поиск наилучших решений путем анализа атрибутов логических переменных, в том числе и таких их качественных элементов, как понятия и отношения с нечеткими границами, высказывания с многозначной шкалой истинности и др. Причем, чем сложнее описываемые объекты, тем более нечеткие описания удается сформулировать на первом этапе. Далее, в процессе анализа задачи и пополнения знаний об объектах за счет проведения дополнительных исследований и изучения аналогов все или часть неопределенностей удается разрешить. При этом, если все неопределенности разрешаются, то получаются четкие модели, описываемые системами уравнений с вещественными или комплексными аргументами, а если не все неопределенности разрешаются, то получаются нечеткие модели, описываемые системами уравнений с логическими и (или) лингвистическими переменными. Исследование последних сопряжено с переборными методами решений, не скалярными целевыми функциями и множественностью оптимальных решений, ранжирование или упорядочивание которых часто носит субъективный характер. Однако попытки в этом случае решать задачи путем задания строгих границ "волевым" методом или искусственным введением однозначности приводят к огрублению исходных данных, которое может способствовать получению четкого, но неверного результата, и поэтому нецелесообразны. Следовательно, формализованное описание систем управления может быть двух классов — четкое и нечеткое. В последнем случае управление принято называть нечетким (fuzzy control) [1]
При формировании задач управления, производят отображение реальной задачи на некоторый формальный язык, являющийся профессиональным языком лица, принимающего решение, т. е. на язык разработчика Ф: Q3 —> Qp, где Ф-отображение множества Q3 объектов отображаемой задачи (элементов и их взаимосвязей) в множество Qp объектов языка разработчика (понятий, отношений, имен и т. д.). В случае, если отображение Ф устанавливает однозначное соответствие элементов множеств Q3 и Qp, имеет место задача управления в условиях определенности. В противном случае будет задача управления в условиях не полной определенности или нечеткая задача управления (НЗУ), которая наступает, когда выполняется хотя бы одно из следующих условий:
![]()
![]()
![]()
![]()
где
/. / — мощность множества, а ![]() — пустое множество. При этом в языке
описания присутствует: синонимия (от
греч. synonymous
одноименный) —
слова, различные по звучанию, но
тождественные или близкие по смыслу,
а также синтаксические и грамматические
конструкции, совпадающие по значению[2];
— пустое множество. При этом в языке
описания присутствует: синонимия (от
греч. synonymous
одноименный) —
слова, различные по звучанию, но
тождественные или близкие по смыслу,
а также синтаксические и грамматические
конструкции, совпадающие по значению[2];
полисемия (от греч. поли — много и sema — знак) — наличие различных (но в какой-либо мере связанных) смыслов и (или) значений у одного и того же знака или знакосочетания [3]. Например, слово "лиса" обозначает животное и хитрого человека;
недостаточность или избыточность — наличие информации в изложении, не нашедшей отображения в модели, либо, наоборот, наличие в модели понятий и (или) отношений, без которых можно обойтись при отображении и которым не соответствуют какие-либо понятия и (или) отношения в исходном языке (исходной постановке задачи).
Рассмотрим наиболее часто встречающиеся виды неопределенностей описания.
На начальной стадии изучения любой новой задачи информации о ней практически нет, т. е. неопределенность связана с неизвестностью информации.
По мере продвижения в изучении задачи на определенном этапе может быть недостоверность информации из-за того, что:
собрана не вся возможная информация (имеется ее неполнота);
собрана не вся необходимая информация (имеется ее недостаточность);
для некоторых элементов определены не их точные описания, а лишь множества, к которым эти описания принадлежат (имеется недоопределенность);
ряд элементов задачи временно описан лишь по аналогии с уже решавшимися задачами (имеется лишь замещающее описание, приводящее к неадекватности информации).
Данные типы неопределенности носят название "недостоверность", которая связана либо с тем, что процесс сбора информации не закончен, либо с тем, что не хватает ресурсов, выделенных для сбора информации. Однако в принципе возможность результативного продолжения сбора информации существует.
Дальнейшее изучение может привести к ситуации либо полной определенности, либо неоднозначности, когда вся возможная информация собрана, но полностью определенное описание не получено и не может быть получено. Источниками возможной неоднозначности могут быть внешняя среда, т. е. физическая неопределенность, либо используемый профессиональный язык, т. е. лингвистическая неопределенность.
Физическая неопределенность может быть связана как со стохастической неопределенностью (случайностью) среды, так и с неточностью измерений вполне определенных величин, фиксируемых приборами с некоторой погрешностью (технической неточностью). При этом, как правило, законы распределения случайных величин, вызывающих физическую неопределенность задачи, можно установить, так как они носят вероятностный характер. Однако описания случайных процессов в виде корреляционных функций, либо спектральных плотностей в случае невыполнения условий стационарности и эргодичности получить не удается, что затрудняет формализацию указанных неопределенностей.
Лингвистическая неопределенность связана с использованием естественного языка при описании НЗУ. Эта неопределенность обусловливается необходимостью оперировать конечным числом слов и ограниченным числом структур фраз для описания за конечное время бесконечного множества разнообразных ситуаций, возникающих в процессе решения НЗУ. Лингвистическая неопределенность порождается, с одной стороны, множественностью значений слов (понятий и отношений)языка, т. е. полисемией, а с другой — неоднозначностью смысла фраз.
Множественность значений слов может привести к неправильному присвоению атрибутов логическим переменным в базе знаний, если одним и тем же словом отображаются существенно различные объекты НЗУ. Такую ситуацию называют монимией. Например, слово "дом" обозначает жилое здание (сбежался весь дом), семья, люди, живущие вместе, их хозяйство (мы знакомы домами), место, где живут люди объединенные общими интересами (Общеевропейский дом), династия, род (Царствующий дом Романовых) и т. д.
Если же слова неточно определяют объекты НЗУ, например небольшой запас топлива — это может быть и 1 тонна и 1,1 тонны и т.д., то возникает ситуация нечеткости, описываемая нечеткими множествами.
Источниками неоднозначности смысла фраз могут быть следующие неоднозначности:
синтаксическая — система языковых категорий, относящихся к соединениям слов и строению предложений [2]. Например: "казнить, нельзя помиловать" и "казнить нельзя, помиловать";
семантическая — значение, смысл отдельного слова, оборота речи [2]. Например, неспециалистам в вычислительной технике могут быть непонятны такие слова, как листинг, флоппи и др.
прагматическая — направление, ограничивающееся описанием событий в их внешней связи и последовательности без раскрытия закономерностей их развития [2]. Например, в рекламе слышим "Бочкарев — правильное пиво". Теперь попробуем задаться целью: производить правильное пиво. Что это означает?
В первом случае для уточнения смысла фраз достаточно уточнить или пополнить правила базы знаний дополнительными правилами синтаксиса. Так, в приведенном примере достаточно правильно поставить запятую и неопределенность устраняется.
Во втором случае может возникать поверхностная и глубинная неоднозначность. При поверхностной неоднозначности могут быть понятны отдельные слова фразы, но вся фраза непонятна и для ее расшифровки требуются уточняющие смысл дополнительные фразы. При глубинной неоднозначности непонятны все отдельные слова фразы и для ее расшифровки требуется доопределение слов. При этом может быть либо разрешена неопределенность, либо мы перейдем к первому варианту неоднозначности, и тогда потребуются уточняющие смысл дополнительные фразы.
Наконец, прагматическая неопределенность связана с неоднозначностью использования синтаксически и семантически понятной информации для достижения целей управления или принятия решения. Так, в приведенном примере, очевидно, что поставленную цель выполнить нельзя, так как не определено понятие "правильное пиво".
Следует отметить, что учет физической неопределенности может усложняться проявлением лингвистических неопределенностей в описании: различные виды неопределенностей могут накладываться друг на друга. Кроме того, необходимо иметь в виду, что указанными типами неопределенности могут обладать любые элементы НЗУ.
В общем случае задача управления может быть охарактеризована следующим кортежем: <Z, М, Р, К, Q, W>, где Z— множество альтернативных решений (законов управления); М — окружение выбора, т. е. среда задачи, в которую включены эталонная модель объекта управления, технических средств управления и окружающей среды, в которой предполагается функционирование объекта управления; Р— система предпочтений эксперта или системы, принимающей решение, на базе которой строятся критерии качества К, соответствующие целям управления Q; W— необходимые способы действий (алгоритм), которые требуется выполнить над множеством альтернатив Z, например, найти наиболее предпочтительную, линейно упорядочить множество допустимых альтернатив и т. п., для того чтобы синтезировать управление, удовлетворяющее системе предпочтений Р по построенному критерию качества К.
Альтернативным решением будем называть вариант решения, удовлетворяющий ограничениям задачи управления и обеспечивающий получение требуемых параметров и характеристик управления, а средой задачи — эталонную модель объектов и системы управления, а также тех условий, в которых предполагается функционирование системы, которые необходимо учитывать при формировании и решении задачи. При этом можно выделить следующие пять основных типов задач управления:
в условиях определенности, когда каждой альтернативе соответствует строго определенный исход,
в условиях риска, когда исход является дискретной или непрерывной случайной величиной с известным законом распределения или хотя бы с известными числовыми характеристиками распределения,
в условиях неопределенности, когда исход является случайной логической переменной или функцией с известной вероятностью ее истинности или ложности,
в условиях неопределенности, когда исход является лингвистической переменной, задаваемой кортежем < I, L, A, G, V>, где /— наименование лингвистической переменной, L— множество ее значений или термов, представляющих собой наименование нечетких переменных, областью определения каждой из которых является множество A, G — синтаксическая процедура, описывающая процесс образования из множества L новых, осмысленных для данной задачи управления значений лингвистической переменной, V— семантическая процедура, позволяющая приписать каждому новому значению, образуемому процедурой G, некоторую семантику путем формирования соответствующего нечеткого множества, т. е. отобразить новое значение в нечеткую переменную,
в условиях неопределенности, когда исход является результатом эволюции и скрещивания ряда альтернатив, каждая из которых может иметь исход либо в виде случайной логической переменной (функции), либо в виде лингвистической переменной.
Первую
задачу будем называть классической
задачей детерминированного управления,
вторую — классической задачей
недетерминированного управления, третью
— задачей логико-вероятностного
управления, четвертую — задачей
логико-лингвистического управления
и пятую — задачей эволюционно-генетического
управления. Очевидно, что к задачам
нечеткого управления относятся задачи
с третьей по пятую и в общем виде их
решением будет синтез алгоритма поиска
ⱷ ![]() W
из множества
альтернатив Z лyчшeгo закона управления
f
Z
на основе оценок
качества К,
построенных с учетом системы предпочтений
Р и среды задачи М:
W
из множества
альтернатив Z лyчшeгo закона управления
f
Z
на основе оценок
качества К,
построенных с учетом системы предпочтений
Р и среды задачи М: ![]() ,
где 2Z—
обозначает
множество всех подмножеств Z,
а Кz—
множество всех кортежей длиной от 2 до
/Z/.
,
где 2Z—
обозначает
множество всех подмножеств Z,
а Кz—
множество всех кортежей длиной от 2 до
/Z/.