

5. Разработка системы управления станочным оборудованием
Технологический процесс изготовления детали или изделия на машинах-автоматах (станках, роботах и другом оборудовании) подразделяется на ряд последовательных операций. Выполнение отдельной операции обеспечивается элементарным приводом, который соответствует определённому рабочему органу. В состав элементарного привода входят путевые выключатели, определяющие положение рабочего органа, и распределительные устройства, предназначенные для подачи рабочего тела в полости цилиндров или моторов в соответствии с поступающими на входы распределителей сигналами.
Сигналы, поступающие от путевых выключателей и сигналы от управляющего устройства могут принимать лишь два значения: сигнал отсутствует «0» и сигнал присутствует «1». На рисунке 5.1 показаны типовые элементарные приводы, для которых двигателями служат пневматические или гидравлические цилиндры, а положение рабочих органов контролируется с помощью струйных путевых выключателей a1, a2, a3 .
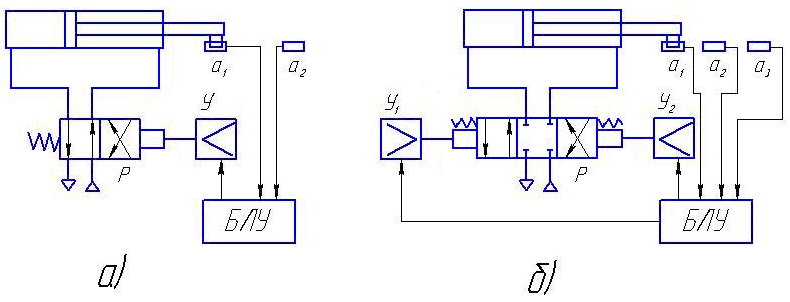
Рис. 5.1 Типовые элементарные приводы
Для привода, приведенного на рисунке 5.1.а, позиция распределителя Р зависит от значения управляющего сигнала, поступающего на его вход. Управляющий сигнал от блока логических условий БЛУ усиливается усилителем У, и поступает на вход распределителя Р. Например, если сигнал «0», то распределитель под действием пружины перемещен в крайнее правое положение, и рабочая среда поступает в штоковую полость цилиндра. Шток цилиндра находится в исходном положении. При сигнале «1» распределитель занимает крайнее левое положение, при этом рабочая среда поступает в поршневую полость, и шток цилиндра перемещается в крайнее правое положение.
17
Шток в начале и в конце хода взаимодействует с путевыми выключателями a1 и a2, сигналы от которых принимают значение «0» или «1» в зависимости от положения рабочего органа. Эти сигналы поступают на входы блока логических условий, входящего в состав управляющего устройства.
В приводе на рис. 5.1.б используется трехпозиционный распределитель, управление которым осуществляется включением и выключением усилителей У1 и У2, усиливающих единичные сигналы, поступающие из блока логических условий.
Путевые выключатели могут быть бесконтактными струйными, индукционными, контактными пневматическими или электрическими. Блок логики может быть реализован на струйных, релейных или электронных элементах.
Распределители могут иметь пневматическое управление или управление от электромагнитов. Роль датчиков могут выполнять и другие устройства, функционально эквивалентные путевым и конечным выключателям: реле скорости, давления, температуры, уровня и др.
Управляющее устройство пневмогидравлической системы управления должно обеспечивать:
- работу привода технологического оборудования в ручном, автоматическом и полуавтоматическом режимах в соответствии с заданным циклом;
- защиту и блокировки привода;
- связь оператора с системой управления и машиной при помощи органов ручного управления и устройств индикации.
Построение управляющего устройства
Пример 1.
Требуется обеспечить возвратно-поступательное движение пневмоцилиндра «А» в автоматическом режиме.
Начало и конец работы контролируется нормально закрытыми кнопками Кп – «Пуск» и Кс – «Стоп».
Индикация положения штока цилиндра «А» осуществляется нормально-открытыми струйными путевыми выключателями: a1 – исходное положение, a2 – крайнее правое положение штока.
Управление пневмоцилиндром «А» осуществляется двухпозиционным распределителем Р с пружинным возвратом.
Переключение распределителя производится усилителем давления УС.
Запишем цикл работы.
А+; A–; A+; A–; …; A+; A–.
Данный цикл можно реализовать с помощью пневмопривода, изображенного на рис.5.2.
18
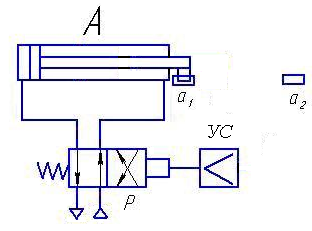
Рис.5.2. Схема пневмопривода для реализации цикла А+; А–.
Для построения системы управления на первом этапе составляется таблица состояний входных (путевых выключателей a1, a2, органов ручного управления Кп, Кс) и выходных (усилитель давления УС) устройств.
Таблица 5.1
Состояния входных и выходных устройств
Номер такта |
Операция |
Входы |
Доп.условия |
Выход |
|||
а1 |
а2 |
КП |
КС |
память КП |
УС |
||
1 |
А+ |
0 |
|
1 |
0 |
1 |
1 |
2 |
А– |
|
0 |
|
|
1 |
0 |
|
Стоп |
|
|
|
1 |
0 |
0 |
Для реализации первого такта (А+) необходимо чтобы шток цилиндра находился в исходном (крайнем левом) положении, при этом сигнал от датчика а1 равен «0». Нажимается кнопка «Пуск» КП, сигнал от нее, равный «1», должен быть запомнен триггерной ячейкой памяти (для того чтобы исключить возврат штока в исходное положение при отпускании кнопки «Пуск»). На усилитель УС должен быть подан сигнал «1». Запишем эти условия в таблицу состояний входов и выходов.
Усиленный сигнал с усилителя включает пневмораспределитель Р, который перемещается в крайнее левое положение, при этом воздух из пневмосети поступает в поршневую полость пневмоцилиндра и шток перемещается вправо.
Второй такт (А–) начнет осуществляться, когда шток достигнет путевого выключателя а2, при этом сигнал с выхода а2 становится равным «0». На усилитель приходит сигнал «0» и он отключается, при этом распределитель под действием пружины возвращается в крайнее правое положение. Воздух из пневмосети поступает в штоковую полость, перемещая шток влево, при этом воздух из поршневой полости выбрасывается в атмосферу или в канализацию. В триггерной ячейке памяти, по-прежнему, записана «1». Запишем эти условия во вторую строку таблицы.
19
При достижении концом штока путевого выключателя а1 цикл повторяется и работа привода осуществляется в автоматическом режиме.
При нажатии на кнопку «Стоп» на ее выходе появляется сигнал «1», на выходе ячейки памяти появляется «0», сигнал на усилитель – «0», распределитель выключается (если был включен), шток пневмоцилиндра возвращается в исходное положение и пневмопривод останавливается. Запишем эти условия в третью строку таблицы состояний.
Теперь, на основании таблицы состояний входов и выходов, можно составить принципиальную схему системы управления пневмоприводом.
На рисунке 5.3 представлена схема системы управления, реализующей заданный цикл. Схема построена на струйных дискретных элементах ИЛИ-НЕ и триггерах с раздельными входами, в качестве путевых выключателей используются струйные датчики с прерыванием струи. Управляющий сигнал от струйного элемента усиливается до 0,2-0,3 МПа в усилителе давления УС.
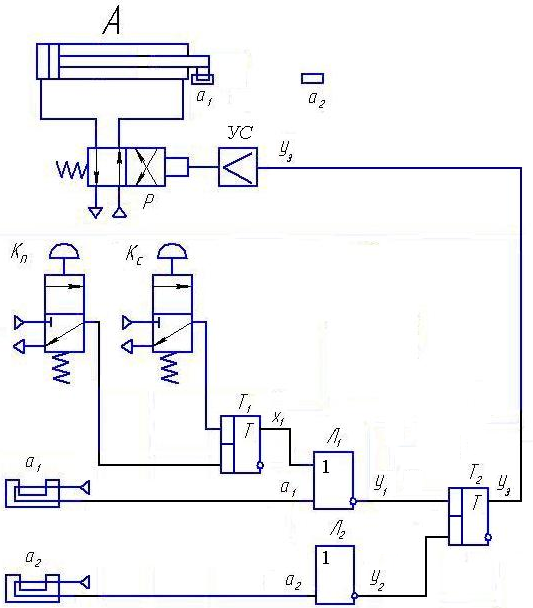
Рис. 5.3 Принципиальная схема системы управления циклом А+; А–.
20
Описание работы системы управления циклом А+; А–.
При нажатии на кнопку «Пуск» (Кп) на нижний вход триггера Т1 подается сигнал «1», триггер переключается и на его прямом выходе появляется сигнал х1= «0».
Если сигнал от датчика а1 тоже равен «0», то на инверсном выходе логического элемента Л1 («ИЛИ-НЕ») появляется сигнал у1= «1». Этим сигналом триггер Т2 переключается и сигнал на его прямом выходе у3 становится равным «1». Этот сигнал усиливается в усилителе УС до значения 0,2 – 0,3 МПа и включает пневмораспределитель Р, который соединяет линию подачи воздуха с поршневой полостью пневмоцилиндра А. Поршень со штоком перемещаются вправо. При этом сигнал а1 становится равным «1», сигнал у1 = «0», но триггер Т2 удерживает сигнал у3= «1».
Как только конец штока достигает путевого выключателя а2 то значение сигнала от а2 становится «0», при этом сигнал у2 с инверсного выхода логического элемента Л2 («ИЛИ-НЕ») становится равным «1», поступает в нижний вход триггера Т2 и переключает этот триггер. При этом сигнал у3 становится равным «0», распределитель Р под действием пружины возвращается в исходное положение и соединяет линию подачи воздуха со штоковой полостью пневмоцилиндра, а поршневая полость соединяется с выходом в атмосферу. Шток цилиндра возвращается в исходное положение. В момент достижения концом штока конечного выключателя а1 сигнал от него становится «0», а сигнал х1 по-прежнему удерживается триггером Т1 (х1= «0»). Цикл повторяется.
При нажатии на кнопку «Стоп» (Кс) сигнал «1» с выхода этой кнопки поступает в верхний вход триггера Т1, триггер переключается (х1= «1») и запрещается дальнейшая работа схемы. После того как шток вернётся в исходное положение, работа пневмопривода прекращается.
Пример 2.
Рассмотрим реализацию пневматической или гидравлической системой управления циклом А+; В+; В–; А–. Система управления (рис. 5.4) содержит два элементарных привода – цилиндры А и В, которые выполняют заданную последовательность движений А+; В+; В–; А–.
Положение рабочих органов контролируется нормально-открытыми путевыми выключателями а1, а2, b1 и b2.
Пуск и останов системы производится нормально-закрытыми кнопками «Пуск» (Кп) и «Стоп» (Кс).
Управление цилиндрами осуществляется двухпозиционными распределителями P1 и Р2 с пружинным возвратом, переключение которых обеспечивается усилителями давления УС1 и УС2.
21
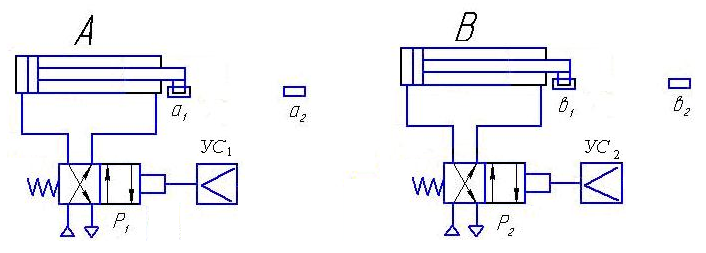
Рис.5.4. Принципиальная схема пневмопривода
для реализации цикла А+; В+; В–; А–.
Составляем таблицу состояний входных и выходных устройств (табл. 5.2).
Такт первый: (А+).
Условием запуска системы в работу являются следующие требования: Контроль исходного положения исполнительных органов и наличие сигнала от кнопки пуск, т.е. а1= «0», b1= «0» и Кп= «1». Только при выполнении данных условий возможно включение усилителя УС1, переключение распределителя Р1 и перемещение цилиндра А (А+). Внесем эти условия в первую строку таблицы.
Такт второй (В+).
Условием перемещения цилиндра В вправо (В+) является достижение штоком цилиндра А выключателя а2 и исходное положение штока цилиндра В, то есть а2= «0» и b1=0. При этом сигнал единичного уровня должен поступить на усилитель УС2, переключающий распределитель Р2.
Такт третий: (В–).
В третьем такте шток цилиндра В должен вернуться в исходное положение. Условиями для выполнения этой операции являются нулевые сигналы от выключателей а2 и b2. Внесем эти условия в третью строку таблицы.
Такт четвёртый: (А–).
В четвертом такте осуществляется возврат штока цилиндра А в исходное положение. Одним из условий выполнения этой операции является совершение цилиндром В операций В+ и В–. Отработаны ли эти операции, мы можем проконтролировать введением в схему управления ячейки памяти (триггера с раздельными входами), которая запомнит сигнал конечного выключателя b2.
Сигнал b1= «0» при возврате цилиндра В исходное положение и наличие сигнала «1» от триггера памяти b2 являются разрешением на возврат цилиндра А.
Для остановки автоматической работы привода нажимается кнопка «Стоп», на ее выходе появляется сигнал «1» и запрещается дальнейшая работа схемы. Цикл отрабатывается до четвертого такта и привод останавливается.
22
Таблица 5.2
Состояния входных и выходных устройств
Такты |
Операция |
Входы |
Доп. условия |
Выходы |
|||||||
а1 |
а2 |
b1 |
b 2 |
КП |
КС |
Память КП |
Память b2 |
УС1 |
УС2 |
||
1 |
А+ |
0 |
|
0 |
|
1 |
|
1 |
|
1 |
0 |
2 |
В+ |
|
0 |
0 |
|
|
|
1 |
|
1 |
1 |
3 |
В– |
|
0 |
|
0 |
|
|
1 |
|
1 |
0 |
4 |
А– |
0 |
|
0 |
|
|
|
1 |
1 |
0 |
0 |
|
Стоп |
|
|
|
|
|
1 |
0 |
|
0 |
0 |
На основании таблицы состояний входных и выходных устройств составляется принципиальная схема системы управления пневмогидроприводом (рис.5.5).

Рис. 5.5 Принципиальная схема системы управления циклом
А+; В+; В–; А–.
23
Пример 3.
В этом примере рассматривается агрегатный способ построения систем управления, которые представляются в виде совокупности взаимодействующих стандартных комбинационных и последовательностных устройств пневмогидроавтоматики. Такой подход существенно упрощает проектирование систем управления, хотя и связан с некоторой элементной избыточностью по сравнению с ранее рассмотренным методом.
Сущность агрегатного метода построения системы управления на элементах пневмогидроавтоматики заключается в следующем:
каждый такт выполняется стандартным цифровым блоком, состоящим из входного логического элемента и триггера с раздельными входами;
на каждый усилитель имеется свой управляющий триггер;
работа системы в последующем такте подготавливается сигналом о выполнении предыдущего такта;
включение последующего такта запрещает работу системы управления в предыдущем такте;
последний блок системы управления является предыдущим для первого блока.
Составим схему пневмогидравлической системы управления, реализующей цикл А+ (зажим); В+ (быстрый подвод); В++ (рабочая подача); В– (отвод) и А– (разжим).
Система управления состоит из двух элементарных приводов – цилиндров А и В, выполняющих заданную последовательность работы. Положение рабочих органов контролируется нормально-открытыми струйными выключателями а1, а2, b1, b2, и b3.
Запуск и останов системы производится кратковременными воздействиями на нормально-закрытые кнопки “Пуск” и “Стоп”.
Составим таблицу состояний входных и выходных устройств (табл. 5.3).
Таблица 5.3
Таблица состояний входных и выходных устройств
Такты |
Операция |
Входы |
Доп. условия |
Выходы |
||||||||
а1 |
а2 |
b1 |
b2 |
b3 |
КП |
КС |
Память Кп |
УС1 |
УС2 |
УС3 |
||
1 |
А+ |
0 |
|
0 |
|
|
1 |
|
1 |
1 |
0 |
0 |
2 |
В+ |
|
0 |
0 |
|
|
|
|
1 |
1 |
1 |
0 |
3 |
В++ |
|
0 |
|
0 |
|
|
|
1 |
1 |
1 |
1 |
4 |
В– |
|
0 |
|
|
0 |
|
|
1 |
1 |
0 |
0 |
5 |
А– |
|
0 |
0 |
|
|
|
|
1 |
0 |
0 |
0 |
|
Стоп |
|
|
|
|
|
|
1 |
0 |
0 |
0 |
0 |
24
Схема пневматической системы управления приведена на рисунке 5.6.
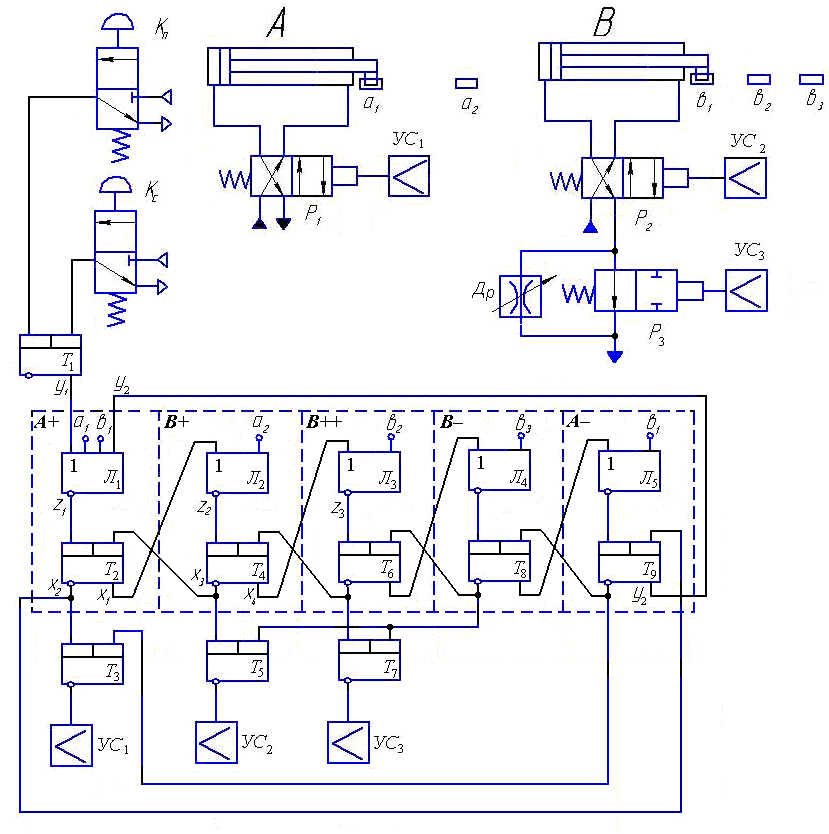
Рис. 5.6 Принципиальная схема системы управления циклом
А+;В+;В++;В–;А–.
Для
осуществления первого такта (А+)
единичный
сигнал от кнопки “Пуск” поступает на
левый вход триггера T1,
с прямого выхода этого триггера нулевой
сигнал y1=0
поступает на вход четырехвходового
логического элемента Л1
(ИЛИ-НЕ),
реализующего операцию
![]() НЕ ИЛИ, записанную в первой строке
таблицы состояний, то есть сигнал
единичного уровня появляется на выходе
злемента Л1
при y1=
0, a1=0,
b1=0
и y2=0.
НЕ ИЛИ, записанную в первой строке
таблицы состояний, то есть сигнал
единичного уровня появляется на выходе
злемента Л1
при y1=
0, a1=0,
b1=0
и y2=0.
25
Эти сигналы подтверждают, что цилиндры находятся в исходном положении, была нажата кнопка “Пуск” и имеется разрешающий сигнал для начала работы цикла: y2=0, поступающий с прямого выхода триггера Т9, реализующего последний такт. Сигнал z1 поступает на левый вход триггера T2. С прямого выхода этого триггера сигнал нулевого уровня x1=0 поступает на вход логического элемента Л2 и подготавливает следующий такт (В+). Одновременно с инверсного выхода триггера Т2 сигнал единичного уровня x2=1 поступает на левый вход триггера Т3, с выхода которого единичный сигнал включает усилитель УС1. Происходит переключение распределителя Р1 и шток цилиндра А выдвигается с быстрой скоростью в крайнее правое положение, взаимодействуя при этом с выключателем а2. Сигнал с выхода триггера Т3 на усилитель УС1 сохраняется и усилитель УС1 остается включенным, поскольку шток цилиндра А должен находится в выдвинутом положении во время работы цилиндра В.
Второй
такт (В+)
может начаться только после того, как
шток цилиндра А
достигнет выключателя а2
и закончится первый такт (вторая строка
таблицы). Логический элемент Л2
реализует логическую операцию
![]() (НЕ ИЛИ) двух переменных. При x1=0
и
а2=0
единичный сигнал z2
переключает триггер Т4,
сигнал единичного уровня которого x3=1
переключает
триггер T5,
который, в свою очередь, включает
усилитель УС2
и распределитель P2.
Шток цилиндра В выдвигается с быстрой
скоростью.
(НЕ ИЛИ) двух переменных. При x1=0
и
а2=0
единичный сигнал z2
переключает триггер Т4,
сигнал единичного уровня которого x3=1
переключает
триггер T5,
который, в свою очередь, включает
усилитель УС2
и распределитель P2.
Шток цилиндра В выдвигается с быстрой
скоростью.
Одновременно с этим сигнал нулевого уровня x4=0 триггера Т4 поступает на вход логического элемента Л3, подготавливая работу третьего такта, а единичный сигнал этого же триггера х3=1 сбрасывает триггер Т2 в исходное положение. В результате переключения триггера Т2 на его выходе устанавливается единичный сигнал x1=1, запирающий схему Л2. Благодаря этому исключается возможность включения второго такта в процессе работы системы управления.
При
взаимодействии штока цилиндра В
с путевым выключателем b2
от него поступает нулевой сигнал на
вход логического элемента Л3,
реализующего операцию
![]() .
Сигнал единичного уровня z3
поступает на вход триггера Т6.
В результате этого включается усилитель
УС3
и распределитель Р3,
в результате этого рабочая среда
направляется через дроссель Др,
скорость перемещения поршня цилиндра
В
становится медленной. Выполняется
третий такт: В++
(третья строка таблицы).
.
Сигнал единичного уровня z3
поступает на вход триггера Т6.
В результате этого включается усилитель
УС3
и распределитель Р3,
в результате этого рабочая среда
направляется через дроссель Др,
скорость перемещения поршня цилиндра
В
становится медленной. Выполняется
третий такт: В++
(третья строка таблицы).
Аналогично осуществляется работа системы в последующих тактах (см. четвертую и пятую строку таблицы состояний).
Для остановки цикла нажимается кнопка «Стоп» Кс и работа привода прекращается (шестая строка).
26