

4.8. Канатные и цепные стропы
I ц 1МИ называют отрезки канатов или цепи, соединенные в и снабженные подвесными приспособлениями, которые •нот быстрое, удобное и безопасное закрепление грузов. | фуча одна из ответственных работ при выполнении опе-1>уимп краном. Ее проводят обученные и аттестованные •ты), имеющие специальное удостоверение. Способы стро-1ЫЖ1ЮТ и проекте производства работ, ним предъявляют следующие основные требования: бе-• (. нронедепия работ; быстрота и удобство строповки и иш, По числу ветвей их делят на канатные одноветве-1 шухнстневые (2СК), трехветвевые (ЗСК), чстырсх-11 к) п универсальные (УСК); цепные одионстнсныс '•• пн'ные (2СЦ), трехветвевые (ЗСЦ), четырсчнстке-и»умя чамкнутыми ветвями (СЦ2нч) и уппнерсаль-| (нноолыпсс распространение поиучиии стропы об-•' нинсрсальпые.
81
Рис. 46. Виды строп:
а-в - универсальные; г-е - с кон цевыми петлями; яс-облегченнь с крюком и кольцом; з - облегчен ный с закладным пальцем; и - дву ветвевой; к - четырехветвево| («паук») с крюками

Универсальные стропы (рис. 46, а-в) представляют собой зал нутую петлю с длиной каната 1-30 м и диаметром 6,3-63 (в зависимости от размеров и массы груза). Концы каната соедш ют заплетши на длину, равную 40 диаметрам каната, или не менЦ чем шестью зажимами.
![]()
С помощью универсальных строп перегружают штучные гр> особенно тяжеловесные и громоздкие, конструкции и трубопров Однако они имеют существенный недостаток: стропальщику в б| шинстве случаев приходится подниматься к узлу крепления стд для его расстроповки.
Одноветвевые облегченные стропы (см. рис. 46, г-ж) выг няют из отрезков каната диаметром до 30 мм. На его концах ц лывают коуши, крюки или карабины в зависимости от назя ния. Изготавливать одноветвевые стропы сложнее, чем уни| сальные, так как приходится делать две заплетки каната у пс I Несмотря на это, их широко применяют для захвата и транс тировки грузов, снабженных монтажными деталями и приспс лениями - петлями, проушинами, скобами и т. д. Свободные | цы облегченных строп присоединяют к несущей части каната • заплетают и соединяют зажимами, а также с помощью гильзе нового соединения. Одноветвевой строп с закладным пал служит для обвязки груза. Наличие закладного пальца сокри
82
I прикрепления стропа и повышает удобство эксплуатации | м рис. 46, з).
Мпо.'оеетвевые стропы предназначены для подъема и транспор-
11111я грузов за две, три или четыре точки. Их широко применя-
• ''ч строповки элементов зданий (панелей, блоков и т. д.), снаб-
л \ 11стаями или проушинами.
Многоветвевые стропы комплектуют из одноканатных стропов
рм.пшзованных верхних и нижних звеньев в соответствии
| ' I 'Ю.48-79 (см. рис. 46, и, к).
11|>и использовании четырехветвевого стропа нагрузка должна ц|,1Г1.ся на все ветви равномерно за счет вспомогательных сочим 1 {срхние концы крепят к треугольному или к разъемному | "юрме даже при разных длинах ветвей дают возможность
• >м регулировать усилие в отдельных ветвях.
11>11>,-<нн'1пвевые уравновешивающие стропы (рис. 47) применя-
мп>1 ьсма элементов зданий (например, плит) при их монтаже.
• " с.им.«о тгих строп плиту можно раскантовать из горизонталь-
Ц 111111П/М.Ч1ПЯ в вертикальное и наоборот. Если плиты хранились
ми), то перед строповкой их переводят в горизонтальное
к1 мл кантователе. К этим стропам крепят блоки, создаю-
к рпос натяжение их нитей.
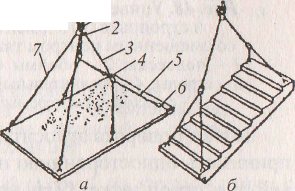
ПМГ1КС1ЮЙ строп состоит из петли /, на которую навеши-I м> I " шпроликовых пятитонных блока 2. На них запасованы м '.На концах стропа 7 установлены карабины 6 для I ромов к поднимаемо-
Л
| врабинами называют
ц| I. I-от,ца, не раскрыва-1Я подъема. Их вы-
• модъемностью 0,4- 1111(1 ' I рона 3 размещают •I••• ЧП.1Х двухтонных
1 которые пропуска-
Рис. 47. Многоветвевые универсальные уравновешивающие балансирные стропы:
а - для подъема плит; б - для лестничных маршей; / - петля; 2 и 4 - од-
карабинами б. ни м исстничныхмар-11Н1 'ц-гырехветвевые
• и 17, 6) с ветвями 11|'п их использова-
1И.111.1И угол наклона нороликовые блоки; 3, 5 и 7 - стро-
пы; 6 - карабины
«юнее 90°.
83
Универсальные стропы (рис. 48, а) грузоподъемностью 10 предназначены для подъема деталей со смещенным центре тяжести и при различном расположении монтажных петель. О* состоят из подвески 1, на которой расположены две обоймы с блоками.

Рис. 48. Универсальный строп (а)
и строповка (б) элементов
со смещенным центром тяжести:
1 - подвеска; 2 - обоймы блоков;
3 - стропы; 4 - уравнительный канат;
5 - страховочная перемычка
За счет поворота относительно крюка крана подвеска может принимать одностороннюю нагрузку отдельно от одной пары вей, т. е. строп может быть использован как двухветвевой. Кал пару ветвей стропов 3 монтируют в блоки, а ветви соединяют нительными канатами 4 и страховочными перемычками 5.
Уравнительный канат 4 не позволяет чрезмерно удлинить ветвь за счет перетягивания другой через блок и перераспрсд! усилия в стропальных ветвях с учетом размещения центра гя/ поднимаемого изделия.
84
('теновую панель со смещенным центром тяжести стропят и под-
нммают так, чтобы стропальная ветвь была направлена уравнитель-
Н1.1М канатом в сторону смещения центра тяжести панели
I' м |>ис. 48, б). Подвеска при подъеме поворачивается на крюке кра-
• ганавливая обойму с блоками по грузовой оси. Усилие от сме-
н юго центра тяжести панели передается через уравнительный
> т и па противоположную сторону блока обоймы с одной ветви щромл на другую, предотвращая их перемещение. Это обеспечива-•I 1.см панели в ее установочном положении.
Ч ту автоматические стропы (рис. 49) позволяют вести быст-Иуи' строповку и расстроповку груза, не поднимаясь к узлу зацепки.
>" пользуют в гибких и в жестких конструкциях. Строп 7 осна-

''". 14. Схема строповки (а) и строповый замок (б):
• ч"'и ' намок; 3 - поднимаемый груз; 4 - инвентарная под-
( коба; 6 - распорка; 7 - обойма с пружиной; 8 - тяговый тросик; 9 - запорный штифт
представляющим собой скобу 5 из круглой стали с и ч- распоркой 6. На обоих концах скобы расположены щи и норного штифта 9.
• II "('путине прикрепляют обойму 7 с пружиной.
тки полуавтоматического стропа натягивают тя-
н и)" Л 11ружина сжимается, а запорный штифт 9 выходит || освобождает строп 1. Груз освобождается.
85
Цепные стропы (рис. 50) используют для подъема и перед щения разных грузов. По сравнению с канатными они обладают ся дующими преимуществами: более удобны в работе, гибки и приг ны для подъема грузов с острыми ребрами без подкладок, примен| ются при высокой температуре грузов, хорошо накладываются груз и снимаются с него, незаменимы при работе в горячих цехах раскаленными деталями, например кузнечных, литейных и др. К ] достаткам относятся: большая масса, внезапный разрыв, трудн| обнаружение дефектов. Эти и другие недостатки ограничивают щ менение цепных строп при подъеме тяжелых и ответственных зов, а также в местах скопления людей и оборудования.

Рис. 50. Цепные стропы:
а - цепная ветвь стропа; б - универсальный; в - двухветвеио г - трехветвевой; д - четырехветвевой; е- с двумя замкнутыми не вями; 1 - верхнее звено; 2 - цепь; 3 - нижнее звено; 4 и 5 - персчо
ные звенья
( С1 роны, изношенные более 10 % по диаметру или имеющие свы-'•II "о негодных звеньев, к эксплуатации не допускаются. II' I пи цепных стропов рассчитывают тем же методом, что и вет-' и: иных строп при коэффициенте запаса прочности 5 и более. При выборе канатов для изготовления стропов необходимо учи-|и 11. ( : юсобы строповки. При строповке в несколько ветвей (много-|ц мим стропом) усилие в ветвях зависит от угла их наклона: чем |н ми \тол наклона ветвей стропа к горизонту, тем больше действу-
> | М1-М усилие. Поэтому при работах не рекомендуется распола-
> > щи стропа под углом к горизонту меньше 30°. На рис. 51 пока-
рп подъеме одного и того же груза массой Р с помощью
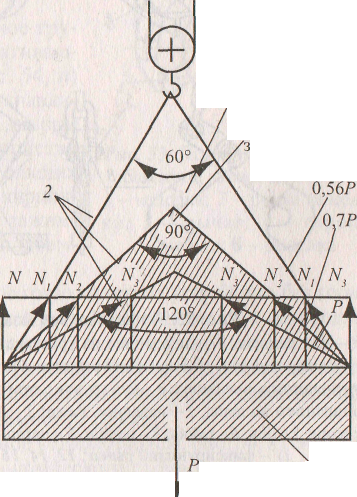
• | итого стропа усилие в ветвях меняется от Р/2 до Р. '< и 11 •< 11 шстся брать груз, если угол между стропами превышает 90°. •иодьемность стропов указывают при угле между ветвями |'ш | ми грим схему строповки. Усилие в ветвях изменяется сле-цшом:
Рекомендуемая зона строповки
Рекомендуемая она строповки
/'/1,73=0,56Р; /У1,4=0,7Р;
•.пики- усилие в вет-м I рш тете увеличе-|| между ними. Так, , (и •шчсиме нагрузки г пню (),56Р, при
при \20°-Р. < и I \смая зона
О < 'гроповка
•мн"| Р и углом
| 1> обрыву и
1
Рис.51. Схема строповки груза
и распределения усилий в ветвях
стропа в зависимости от угла
между ветвями: 1 - груз; 2 - стропы
I' ' ц ц 1 чучаях ис-
' ||1 н" |» у или бо-
||чр|1Ы, НО ЭТО
о сделать
1со11.1 подъе-
1М1М
86
87
Захватные устройства клещевого типа (рис. 52) предназначен для транспортирования строительных изделий с опорными поверз ностями, представляющими собой плоскости с различными о,тве] стиями и т. п. Фиксирующее устройство состоит из рычага, шарни] но связанного с одной из захватных лап, и упора, расположенного' внутренней стороны другой лапы. Оно обеспечивает свободный съе и заводку захвата перед подъемом на изделие без участия стр< пальщика.

Рис. 52. Клещевые грузозахватные устройства:
а - для рельсов; б ~ сдвоенное на траверсе для балок; в - на траверсе дли г ~ с защелкой для стабилизации рычагов в открытом положении; д - для подц транспортировки балок; е - для грузов с отверстиями; ж - для грузов со сво( опиранием на лапы; 1 - навесное звено; 2 - цепная ветвь; 3 - скоба; 4 - чп. клещи; 5 - ось; б - гайка; 7 - шайба; 8 - шплинт; 9 - съемная опора; 10 и 15 -11 - фиксирующий рычаг; 12,14, 16 - оси; 13 - рычаг; 17 — лапы
Полуавтоматические клещевые захватные устрой*
(рис. 53) служат для перегрузки и транспортирования труб. Они жены защелкой, которая автоматически фиксирует открытое жение и раскрывает рычаги при опускании трубы на опоры.) \\ вата труб разного диаметра используют сменные колодки.

Фрикционные самозажимные 1>\'юзахватные устройства имеют прижимные элементы, за счет сжатия и > 11 >рых груз удерживается силой тре-||нч 11аиболыиеераспространение по-' ми ни рычажные и рычажно-канат-1!1,И' самозажимные захваты.
Усилие зажатия груза создается си-
йий тяжести груза и самого захвата,
I 'ос передается на зажимные орга-
мн 1 I юмощью рычажных, канатных и
М|П'1 их передаточных устройств.
'Фрикционные самозажимные гру-•нымитиые устройства применяют в | 11"111 и-ньстве для грузов прямоуголь-н>рмы с гладкими боковыми по-о1тями (балки, перемычки, бло-|пионы, ящики, железобетонные 1 и др.).
Рис. 53. Полуавтоматический
клещевой захват для труб: 1 - колодка; 2 - ручка защелки: 3 — рычаг; 4 — строп; 5 - с ерьга; 6 - защелка
рикционное самозажимное гру-иа гное устройство со стягиваю-рычпжной системой (рис. 54, а) I р| г пи-ограничитель, устанавли-I с IЖ11мные башмаки на два раз-|;| по толщине. Устройство н -щи перемещения небольших 1м.1\ I руюв (контейнеров, кирпич-пм и др.). Раскрытие зажим-' ц он 420 мм, грузоподъем-
нипнпое самозажимное грузозахватное устройство без гори-н 11 тепа со стягивающей рычажной системой и с совмещен-'ишмм шарнирами рычагов в один шарнир (см. рис. 54, б) !•!• но для подъема и транспортирования круглых деталей,
.|\ пчтолстостенного металла. Раскрытие захватных ор-
1 I 'П мм, грузоподъемность 100 кг.
м м..ммое грузозахватное устройство (см. рис. 54, в) снабже-
н-мнсм для автоматического съеми с груза. Оно слу-
|М|>»'1 ручки рулонов листовой стали и других подобных гру-
' и ми.шпн рычажной системы груз обжимается в четырех
м I г | о и наружного диаметров. Гру зоподъемность уст-
' рытис на больший диаметр 1050—1450мм, а на мень-
1м. Масса устройства 700 кг.
89

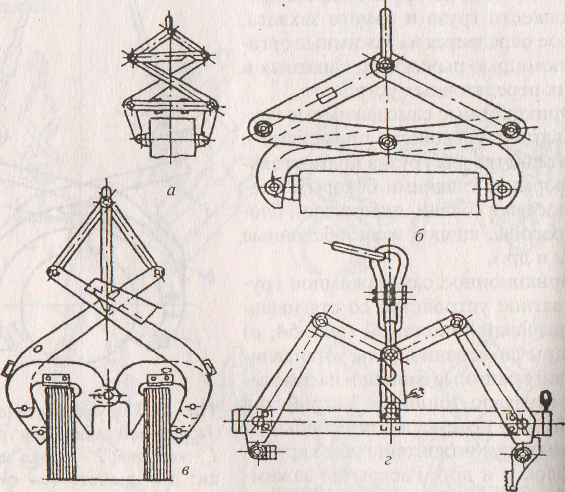
Рис 54. Фрикционное самозажимное грузозахватное устройств а - со стягиваемой рычажной системой; б - со стягиваемой рычажной и схемой и с совмещенными средними шарнирами; в - для рулонов лисп вой стали; г - с распорной рычажной системой и управляемым цеп.инн щим приспособлением для удержания устройства в раскрытом положена
Рычажные фрищионно-зажимные грузозахватные устрош показаны на рис. 55. Устройство для узких грузов (см. рис. 55, а) с шири захвата груза 190-290 мм рассчитано на грузоподъемность /т широких грузов (см. рис. 55, б) с шириной зева 580-750 мм - I I узких грузов (см. рис. 55, в) с шириной зева от 60-1500 мм - I . широких грузов (см. рис. 55, г) с шириной зева 500—1850 мм
Рычажно-канатные самозажимные захваты широко н|)| няют при перегрузке тарно-штучных грузов со значительным ДМ зоном габаритов.
90
Захват включает канат, огибающий блоки, которые установлены пи чажимных рычагах. Наличие горизонтальной ветви (затяжки) способствует повышению силы сжатия груза.
На рис. 55, д изображено рычажно-канатное самозажимное гру-к | ихватное устройство для подъема и транспортирования ящиков и '(ругих грузов в прочной таре. Оно состоит из стального каната, ко-(' Ч н.| и огибает блоки, установленные на захватах. Грузоподъемность 11М) кг, раскрытие зажимов 400-900 мм.
1'ч,. 55. Рычажное зажимное грузозахватное устройство:
широких грузов, стягиваемые и распорные; д~ж - рычажно-канат-
П и, дорожных бордюров и бумаги в рулонах; / и §-зажимные рычаги:
М1 и п. ( и 9 - блоки; 4- серьга; б-ролики; 7- обойма; 10- крюк крана
• ! |км|ство, показанное на рис. 55, е, для транспортирования и и и >| южных бордюров входят: две ветви каната и блоки, ко-•Тйновлены на захватных рычагах; подвески для навешива-' | '!• •! I рузоподъемной машины. Грузоподъемность-0,5 т, дли-I | II пи чажимов - 1500-2000 мм.
штатное самозажимное захватное устройство (см. рис.
I >д|,емкостью до 1,4 т предназначено для перегрузки бума-
п фугих грузов. Раскрытие устройства 150-750 мм.
5)1
Эксцентриковые грузо-захватные устройства (рис. 56) делят на две группы с односторонним и двусторонним расположением эксцентриков. Зажимным органом служит кулачок, диск или рычаг, насаженный на вал таким образом, что центр его смещен относительно оси вала. Расстояние между центром эксцентрика и осью вала называют эксцентриситетом.
Эксцентриковые грузозахватные устройства предназначены для захвата и перемещения плоских грузов в вертикальном положении и ] реже в горизонтальном, а также для транспортирования грузов с твер-Я дым покрытием поверхности. При их использовании контактная на-1 грузка на груз велика. Они получили большое распространение для! перемещения листового металла разной толщины.
Для подъема длинномерных грузов применяют траверсы с навешенными на них несколькими эксцентриковыми устройствами.
Эксцентриковые грузозахватные устройства с односторонним расположением эксцентриков показаны на рис. 56, г- г. Для повышения надежности удержания груза на рабочих поверхностях экс-] центриков делают насечки.

Рис. 56. Эксцентриковые грузозахватные устройства: а, б - с двухсторонним эксцентриком; в - для листового проката в горизонтальном положении; г - с одним эксцентриком, поджимаемым вручную; д, е - с одним эксцентриком, поджимаемым натяжением подъемного каната; / - оси; 2 - кулачок; 3 - рычаг; 4 - скобы; 5 - щека; 6 - эксцентрик; 7 - тяги; 8 - вилки; 9 - клиновая планка
92
Клиновые грузозахватные устройства (рис. 57) используют при подъеме и транспортировании грузов с полостью, выполненной обычно в виде круглого отверстия необходимого диаметра для взаимодействия с распорными элементами устройства. Значительно реже их применяют при подъеме изделий за боковые поверхности или выступающие элементы.

Рис. 57. Клиновые грузозахватные устройства:
п.г'гажно-клиновое; б - клиновое для подъема груза за боковые поверхности; шровое; г - для бетонных и железобетонных изделий; Э - с двумя кулачками и им отцеплением; е - с двумя кулачками и дистанционным управлением; 11 ержневое; / - груз; 2 — распорные элементы; 3 - подъемное звено; 4 - распор-шарик; 5, 12, 26 - кулачки; 6 - ручка; 7 - обойма; 8, 13 - винты; 9 - втулка; чубья; 11, 24 - канаты; 14 - корпус; 15 - петля каната; 16, 21 - пальцы; 17, 28 -ц и; 18 - палец стропа; 19 - строп; 20 - грузовой канат; 22 - оголовник; 23 - ограничитель заглубления; 25 - диафрагма; 27 - клин
93
К основным частям наиболее распространенного клинового захвата относят размещенные в отверстиях груза подвижные распорные элементы в горизонтальном направлении и конусообразный клин -в вертикальном. Распорные элементы выполняют в виде конических сегментов, клиновидных кулачков или призматическими.
Таблица 8
Параметры клиновых грузозахватных устройств для бетонных и железобетонных изделий
Грузоподъемность, т |
Марка бетона |
Поднимаемые изделия |
Масса устройства, кг |
Диаметр, мм |
Длина, мм |
Заглубление в бетон, мм |
Унифицированное устройство с ручным отцеплением |
||||||
4 |
300 |
Фундаментные плиты, блоки стен подвала, дорожные плиты, сваи, балки, колонны |
5 |
48 |
280 |
180 |
С дистанционным отцеплением |
||||||
31 |
200 |
Элементы гидросооружений |
82 |
140 |
1200 |
900 |
Стержневое грузозахватное устройство |
|
|||||
3,2 |
- |
Панели внутренних и наружных стен, перекрытий и др. |
4 |
90 |
300 |
|
Чтобы уменьшить износ и большую подвижность, распорны! элементы иногда изготавливают с шаровой поверхностью.
Параметры клиновых грузозахватных устройств для бетонных I железобетонных изделий приведены в табл. 8. Устройство с двумя и лачками и ручным отцеплением состоит из корпуса 14 (см. рис.57, () с оголовником вверху и клином внизу. По плоскости корпуса сколь ш клиновидные кулачки 5 с острыми зубьями 10, выполненными I твердого сплава. По оси корпуса снизу расположено отверстие, которое вставлена втулка 9. Через втулку и отверстие в кулачках при пущен стальной канат, который закреплен винтом 13. Канат прочн дит через отверстие в верхней части корпуса и оканчивается и пи ч
94
петли 15. Для предохранения от выпадения втулки и пружины из отверстия установлен винт 8.
Клиновое грузозахватное устройство с дистанционным управлением (см. рис. 57, е) состоит из полого корпуса 14 с клином 27. Вверху корпуса находится оголовник 22, в отверстии которого размещен палец 21 для грузового каната 20. На рычаге 17 закреплен на пальце 18 вспомогательный строп 19. Устройство вводят в глухое отверстие бетонного элемента до упора ограничителя 23 заглубления в грань отверстия с помощью рычага (кулачки 26 подняты). После ослабления вспомогательного стропа и опускания рычага под действием пружины кулачки опускаются и соприкасаются своими зубьями с поверхностью полости. При подъеме грузового стропа кулачки зубьями врезаются в тело бетона до тех пор, пока не наступит состояние равновесия, и тогда бетонный элемент поднимается.
Стержневое грузозахватное устройство показано на рис. 57, ж. С помощью рычага 28 поднимают клин в крайнее верхнее положение, надевают корпус на штырь до упора его в грань изделия и поворачивают рычаг вокруг шарнира. Рычаг под действием собственного веса прижимает зубья клина к поверхности штыря. Затем изде-ннс поднимают за петлю 15 каната. При этом зубья клина врезаются п стержень. По окончании подъема ослабляют строп. Происходит расклинивание.