

18. Простые движения твёрдого тела
18.1. Поступательное движение
- 18.1
Примеры поступательного движения тел: лифт; вагон (или автомобиль) на прямолинейном участке дороги; движение люльки со скамейками на аттракционе «колесо обозрения» - см. рис.1; движение шатуна в механизме шарнирного параллелограмма - рис.18.2.
Колесо обозрения Механизм шарнирного параллелограмма

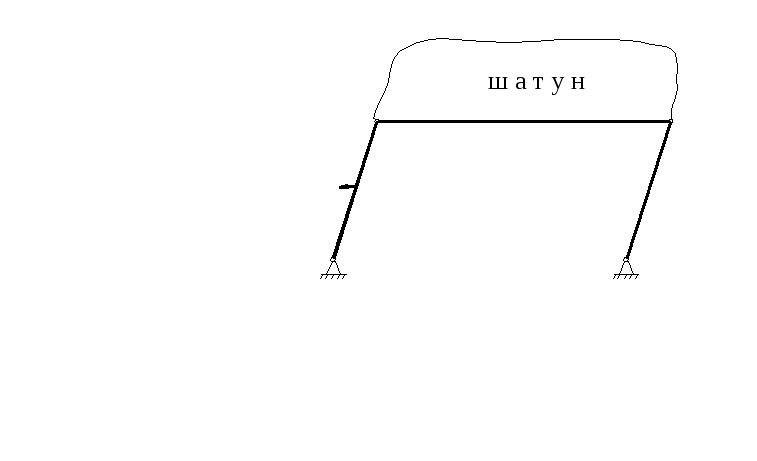
Рисунок 18.1 Рисунок 18.2
Замечания:
п 18.2
т
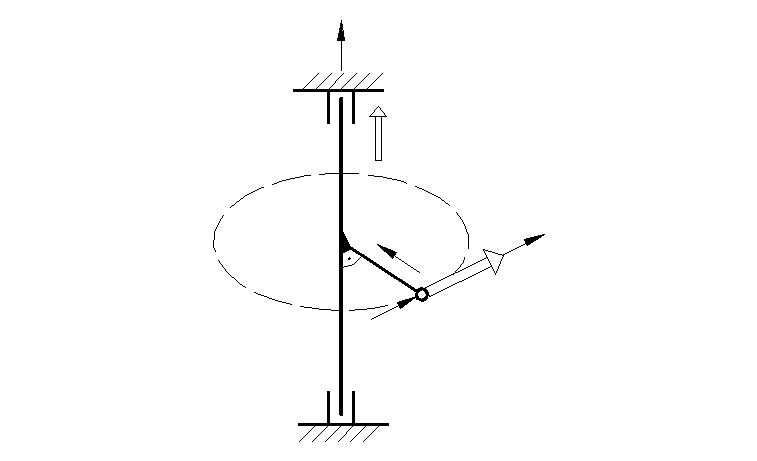
Поршень в теле
вращающегося диска 18.3
 очки
поступательно движуще-гося тела описывают
одинако-вые траектории (при наложении
совмещающиеся друг с другом);
очки
поступательно движуще-гося тела описывают
одинако-вые траектории (при наложении
совмещающиеся друг с другом);
п 18.4
что иллюстрировано на рис.18.3, где:
1 – подпружиненный поршень; 2 - вращаю-щийся диск; 3 - корпус механизма; поршень относительно диска движется поступательно, относительно корпуса - нет.
З
Рисунок 18.3
в 18.5
107
П
К закону об
одинаковости скоростей и ускорений

![]()
П усть
(см. рис.18.4)
усть
(см. рис.18.4)![]() - радиус-векторы произвольных точек
- радиус-векторы произвольных точек![]() поступательно движущегося тела.
поступательно движущегося тела.
Т.к.
![]() ,
где
,
где![]()
(![]() в соответствии с понятиями абсолютно
тврдого тела и поступательного его
движения), то, после взятия от записанного
равенства производной по времени,
получаем:
в соответствии с понятиями абсолютно
тврдого тела и поступательного его
движения), то, после взятия от записанного
равенства производной по времени,
получаем:![]() .
.
А
Рисунок 18.4![]() и т.д.
и т.д.
Т.к.
![]() , то,
, то,
после взятия производной по времени от
последнего равенства, получаем и
равенство ускорений точек
![]() Использование ранее изложенных методов
для теоретического перехода к закону
18.5 завершено. Итак:
Использование ранее изложенных методов
для теоретического перехода к закону
18.5 завершено. Итак:
в 18.6
18.2. Вращательное движение
- 18.7
В
К понятию вращательного
движения рамках рассматриваемого подраздела
ось вращения будем обозначать буквой
рамках рассматриваемого подраздела
ось вращения будем обозначать буквой![]() ,
а её орт -
,
а её орт -![]() .
Примеры вращательных движений: ротор
электродвигателя, карусель, дверь и
т.п.
.
Примеры вращательных движений: ротор
электродвигателя, карусель, дверь и
т.п.
При описании вращательного движения полуплоскость системы отсчёта, начинающуюся с оси вращения, называют неподвижной полуплоскостью (или полуплоскостью отсчёта - см. рис.5).
П
Рисунок 18.5
108
18.2.1. Об угловых скоростях и ускорениях
Процесс перемещения подвижной полуплоскости относительно неподвижной называют поворотом тела. Количественной его характеристикой является
у 18.8
![]() между подвижной и неподвижной
полуплоскостями, рассматриваемый как
алгебраическая величина - больше нуля
тогда, когда мысленное движение в
направлении изображающей его круговой
стрелки оказывается встречным по
отношению к движению конца стрелки
часов при условии, что циферблат виден
с положительного направления оси
вращения.
между подвижной и неподвижной
полуплоскостями, рассматриваемый как
алгебраическая величина - больше нуля
тогда, когда мысленное движение в
направлении изображающей его круговой
стрелки оказывается встречным по
отношению к движению конца стрелки
часов при условии, что циферблат виден
с положительного направления оси
вращения.
в 18.9
![]() .
.
у 18.10
![]() )
– это кинематическая мера вращательного
движения твёрдого тела, определяемая
как первая производная по времени от
вектора поворота, т.е.
)
– это кинематическая мера вращательного
движения твёрдого тела, определяемая
как первая производная по времени от
вектора поворота, т.е.
![]() ,
где
,
где
![]() - проекция угловой скорости
на ось вращения.
- проекция угловой скорости
на ось вращения.
Единицей
измерения угловой скорости является
радиан за секунду, что в записях
обозначают:
![]() ,
либо (редко) -
,
либо (редко) -![]() .
.
В
практике чаще частоту вращения оценивают
числом оборотов в минуту (![]() об/мин). Т.к. за одну минуту тело
поворачивается на
об/мин). Т.к. за одну минуту тело
поворачивается на![]() радиан, а за секунду на угол в 60 раз
меньший, то
радиан, а за секунду на угол в 60 раз
меньший, то
у 18.11
![]() гловая
скорость тела (речь идёт о модуле
гловая
скорость тела (речь идёт о модуле![]() ),
выраженная в радианах за секунду, с
числом оборотов в минуту связана
соотношением
),
выраженная в радианах за секунду, с
числом оборотов в минуту связана
соотношением
У 18.12
![]() )
– это кинематическая мера вращательного
движения твёрдого тела, определяемая
как первая производная по времени от
угловой скорости, т.е.
)
– это кинематическая мера вращательного
движения твёрдого тела, определяемая
как первая производная по времени от
угловой скорости, т.е.
![]() ,
где
,
где
![]() - проекция углового
ускорения на ось вращения.
- проекция углового
ускорения на ось вращения.
109
Единицей
измерения углового ускорения является
![]() .
.
Подобно тому, как это делалось при рассмотрении кинематики точки,
принято различать:
если
![]() ,
т.е.
,
т.е.![]() - вращениеравномерное;
- вращениеравномерное;
если
![]() - вращениепеременное
- вращениепеременное
(при
![]() -ускоренное;
при
-ускоренное;
при
![]() -замедленное);
-замедленное);
если
![]() - вращениеравнопеременное
- вращениеравнопеременное
(при
![]() -равноускоренное;
при
-равноускоренное;
при
![]() -равнозамедленное).
-равнозамедленное).
18.2.2. О линейных скоростях (иначе: О скоростях
О связи между ![]() и
и
![]()
Н а
рис.6 изображён стержень, вращающийся
вокруг перпендикулярной ему оси
а
рис.6 изображён стержень, вращающийся
вокруг перпендикулярной ему оси![]() .
.
Т.к.
![]() ,
,![]() ,
то из
,
то из![]() получается
получается
ф
Рисунок 18.6 18.13
![]() .
.
Ц
О связи между![]() и
и
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ентральное
место в современном курсе теоретической
механики занимает векторный метод. По
этой причине выведем формулу, в которой
скорости точек вращающегося тела
выражаются через угловую его скорость.
С этой целью изображаем рис.7, из которого
видно, что орты
ентральное
место в современном курсе теоретической
механики занимает векторный метод. По
этой причине выведем формулу, в которой
скорости точек вращающегося тела
выражаются через угловую его скорость.
С этой целью изображаем рис.7, из которого
видно, что орты![]() связаны соотношением:
связаны соотношением:![]() .
.
Т.к.
![]() ,
то
,
то![]() .
.
Учитывая 18.13, получаем:
Рисунок 18.7![]()
Но
![]() ,
а
,
а![]() .
.
Поэтому получаем:
110