

П
К условию примеров
25.4 и 5 з
Р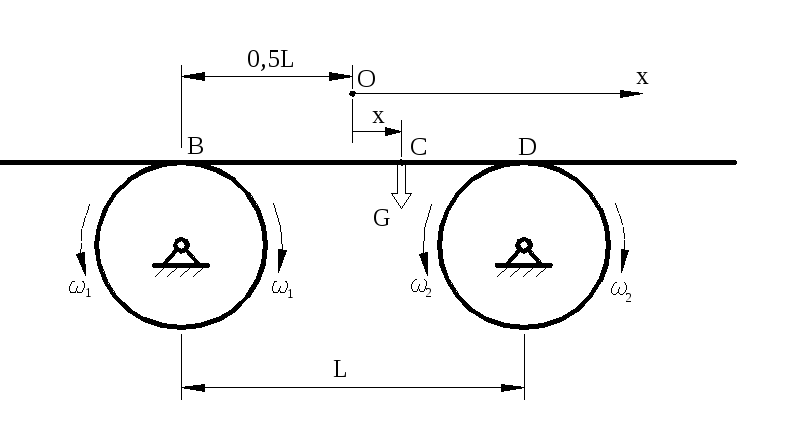 ешение.-
Силы трения скольжения в точках В и D,
как известно из статики, определяются
по формулам:
ешение.-
Силы трения скольжения в точках В и D,
как известно из статики, определяются
по формулам:
а
![]()
(применительно к рассматриваемому случаю на рис. 5 они изображены сплошными стрелками).
П
Рисунок 25.4 К решению примеров
25.4 и 5
![]()
![]() и
и
![]()
п
25.12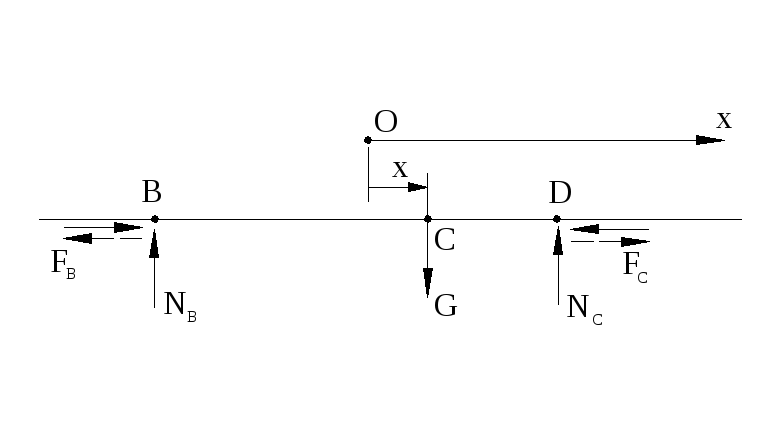 олучаем
(допустимость использова-ния записанных
уравнений будет ясна после изучения
принципа Даламбера):
олучаем
(допустимость использова-ния записанных
уравнений будет ясна после изучения
принципа Даламбера):

б![]()

в Рисунок 25.5![]()
Векторное уравнение, отображающее закон движения центра доски:
г
![]() .
.
Проектируя его на ось
![]() ,
получаем:
,
получаем:
д
![]() .
.
Из (а), (б), (в) и (д):
е![]()
 ,
где
,
где
![]()
это уже встречавшаяся (см. 25.9) каноническая форма дифференциального уравнения свободных колебаний. Его решение:
ж
![]() ,
где
,
где
постоянные
![]() определяем из начальных условий.
Для этого учитываем, что
определяем из начальных условий.
Для этого учитываем, что
185
![]()
 .
.
Откуда:
![]()
![]() и т.д.
и т.д.
Теперь
используем (ж):
![]()
![]() .
.
Итак,
получаем:
![]() ,
т.е.
,
т.е.
![]() .
.
Замечание:
из (е)
видно, что механическую
систему по рис. 4 можно использовать в
качестве установки для определения
коэффициента трения скольжения
экспериментально-теоретическим способом
– т.к. круговая частота
![]() с периодом колебаний
с периодом колебаний
![]() связана соотношением
связана соотношением
![]() ,
то получается
,
то получается
ф ормула
для экспериментально-теоретического
способа определе-ния коэффициентов
трения скольжения
ормула
для экспериментально-теоретического
способа определе-ния коэффициентов
трения скольжения
![]() ,
где
,
где
![]() м/с2
– ускорение свободного падения,
м/с2
– ускорение свободного падения,
![]() - конструктивный параметр;
- конструктивный параметр;
![]() -
экспериментально определяемый период
колебания.
-
экспериментально определяемый период
колебания.
ПРИМЕР 25.5.- Доска на противоположно вращающихся барабанах. Силами трения растягивается - это пример на определение движения центра масс при силах, являющихся функцией координаты; характер движения неустойчивый. Вспомогательная значимость примера – показ на конкретном примере, что «подобия» и «похожести» по одним параметрам сопоставляемых систем (явлений, процессов и т.п.) далеко не всегда являются основаниями к утверждениям типа «да это тоже самое».
Дано.
- Механическая система, рассматривавшаяся
в примере 25.4 (изображена на рис.25.4 и 5) –
та же конструкция (![]() м;
вес доски -
м;
вес доски -
![]() и прочие одинаковости); тот же коэффициент
трения (
и прочие одинаковости); тот же коэффициент
трения (![]() ),
те же начальные условия (при
),
те же начальные условия (при
![]()
![]() м);
причём, барабаны вращаются как и в
примере 25.4 в противоположных направлениях,
но произведен реверс
электродвигателей -
направления вращения для примера 25.5
указаны прерывистыми линиями.
м);
причём, барабаны вращаются как и в
примере 25.4 в противоположных направлениях,
но произведен реверс
электродвигателей -
направления вращения для примера 25.5
указаны прерывистыми линиями.
Требуетсяпроанализировать движение
доски - возможность схода её с барабанов.
И, если анализ предскажет такое событие, то вычислить момент времени
![]() ,
в который центр тяжести С доски будет
проходить через точкуD(или В) её соприкосновения с барабаном.
,
в который центр тяжести С доски будет
проходить через точкуD(или В) её соприкосновения с барабаном.
186
Решение.- Ясно, что решение примера 25.5 повторяет решение примера 25.4 до (г). Различия начинаются с (д) - получается
![]() ,
,
т.е. получается дифференциальное уравнение
е![]()
 ,
где
,
где
![]() .
.
Находим 1-й интеграл дифференциального уравнения (е).
Т.к.
![]() ,
,
то (е) принимает вид:
ж
![]() .
.
И в левой, и правой частях видны табличные интегралы. Берём их -
з![]()

![]()
Т.к.
![]() ,
то из (з):
,
то из (з):
 .
.
Вновь видим табличные интегралы. Интегрируем:
![]()
![]()
 .
.
Из
полученного уравнения движения видно
монотонное возрастание
![]() с увеличением времени
с увеличением времени
![]() .
Вывод: доска через определённый
промежуток времени сойдёт с барабанов.
.
Вывод: доска через определённый
промежуток времени сойдёт с барабанов.
Вычисляем
время
![]() ,
по истечении которого координата
,
по истечении которого координата
![]() центра доски окажется равной половине
центра доски окажется равной половине
![]() (после чего она под действием собственного
веса безвозвратно потеряет горизонтальное
положение и свалится с барабанов):
(после чего она под действием собственного
веса безвозвратно потеряет горизонтальное
положение и свалится с барабанов):
187
![]() .
.
Откуда
![]() с.
с.
ПРИМЕР 25.6.- Вывод формулы для вычисления максимально возможной скорости катера. Это пример на определение движения центра масс в случае, когда главный вектор внешних сил является функцией квадрата модуля скорости
Дано.
- Движущая катер сила (приложена к винту
со стороны воды - рис.25.6) -
![]() .
.
К условию и решению примера 25.6![]()
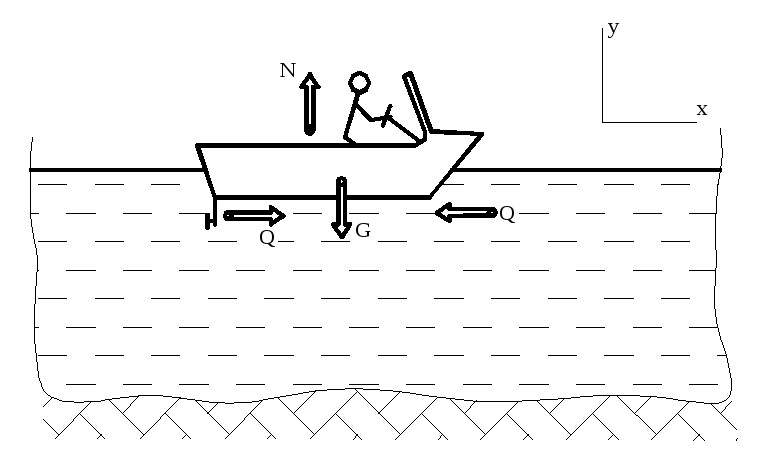 -
вес катера с людьми и прочим находящимся
в нём грузом (
-
вес катера с людьми и прочим находящимся
в нём грузом (![]() ,
где
,
где
![]() -
масса,
-
масса,
![]() - ускорение свобод-ного падения тел).
- ускорение свобод-ного падения тел).
![]() -
выталкива-ющая сила.
-
выталкива-ющая сила.
![]() - сопротив-ление движению (со стороны
воды);
- сопротив-ление движению (со стороны
воды);
![]() ;
;
![]() -
модуль скорости катера. При
-
модуль скорости катера. При
![]() .
.
О
Рисунок 25.6
![]() Установить также максимально
возможное значение этой скорости.
Установить также максимально
возможное значение этой скорости.
Решение.- Основное уравнение динамики материальной точки применительно к рассматриваемому случаю
![]() .
.
Проектируем
составленное векторное равенство на
ось
![]() и получаем:
и получаем:
![]() ,
где
,
где
![]() .
.
В левой и правой частях получившегося дифференциального уравнения содержатся табличные интегралы. Интегрируя получаем:
188
![]()
Используя
начальные условия находим постоянную
![]() и получаем:
и получаем:
![]()
![]()
Откуда, после алгебраических преобразований:
 .
.
Из
последнего выражения видно, что модуль
скорости имеет максимальное значение
при
![]() ,
т.е.
,
т.е.
![]() .
.
Решения примеров 25.3-6 требовало составления одного дифференциального уравнения второго порядка. Переходим к иллюстрации более сложных случаев - когда материальная точка имеет две степени свободы и приходится составлять систему двух дифференциальных уравнений 2-го порядка.
Ограничиваемся рассмотрением трёх близких друг к другу по инженерно-физической сущности случаев пассивного (без наличия движущей силы) полёта тела: пример 25.7 – без учёта сопротивления воздуха и два примера (25.8 и 25.9) - с учётом сопротивления.
189
ПРИМЕР 25.7.- Прыжок воднолыжника - это пример на определение движения центра масс в случае, когда главный вектор внешних сил является постоянной во времени величиной, движение криволинейное (в исторически значимых примерах, изложенных в поразделе 3.4, рассматривался более простой случай – прямолинейное движение).
Дано:
начальная скорость (![]() ;
;
![]() м/с,
м/с,
![]() );
высота (
);
высота (![]() м)
расположения в начале полётной фазы
центра масс механической системы
«спортсмен-лыжи» над горизонтальной
плоскостью, в которой этот центр масс
окажется в момент касания лыж с водной
поверхностью (см. рис.25.7).
м)
расположения в начале полётной фазы
центра масс механической системы
«спортсмен-лыжи» над горизонтальной
плоскостью, в которой этот центр масс
окажется в момент касания лыж с водной
поверхностью (см. рис.25.7).
Определить
дальность (![]() )
и максимальную высоту полёта (
)
и максимальную высоту полёта (![]() )
воднолыжника.
)
воднолыжника.
К условию и решению
примера 25.7

Рисунок 25.7
Решение.- Записываем основное уравнение динамики материальной точки (центра масс системы «спортсмен-лыжи») применительно к рассматриваемому случаю
а
![]() .
.
Проектируя
(а) на ось![]() получаем:
получаем:
б
![]()
Откуда:
![]() .
.
Взяв второй интеграл от (б), получаем:
в
![]()
(постоянная
интегрирования равнялась нулю по той
причине, что время принято отсчитывать
от момента, когда центр масс воднолыжника
находится на оси
![]() ).
).
Теперь
проектируем векторное равенство (а)
на ось![]() .
Получаем:
.
Получаем:
190
г
![]() .
.
При
![]()
![]() .
Поэтому
.
Поэтому![]() и:
и:
д
![]() .
.
Теперь интегрируем дифуравнение (д). Получаем:
![]() .
.
Т.к.
при
![]() то
то![]() и, поэтому:
и, поэтому:
е
![]() .
.
Момент
времени, соответствующий
![]() обозначаем
обозначаем![]() .
В этот момент времени
.
В этот момент времени![]() (потому, что вектор скорости на вершине
траектории горизонтален).
(потому, что вектор скорости на вершине
траектории горизонтален).
Из математического анализа известно: чтобы установить максимум функции (а речь идёт о траектории) необходимо взять от неё производную и приравнять нулю. Такая производная уже имеется - см. (д),откуда и получаем:

ж![]()
Теперь (ж) подставляем в (е) и получаем:
з

или, после
числовой подстановки,
![]() м.
м.
Момент
касания лыжами водной поверхности (![]() )
устанавливаем из(е) -
)
устанавливаем из(е) -
т.к. при
![]()
![]() то получаем:
то получаем:
![]() .
.
Откуда (решая квадратное уравнение):
и
 .
.
Теперь, после подстановки (и) в(в), получаем:
191
к
 .
.
И, наконец, из (и) и(к) после численных подстановок находим:
![]() м.
м.
ПРИМЕР 25.8*.- Полёт тела (снаряда), брошенного под углом к горизонту с учётом сопротивления воздуха - это пример на определение движения центра масс в случае, когда главный вектор внешних сил является функцией вектора скорости
Дано.
- Начальная скорость бросания
![]() (
(![]() -
модуль,
-
модуль,
![]() -
угол её расположения относительно
горизонта – см. рис. 25.8). Сила сопротивления
-
угол её расположения относительно
горизонта – см. рис. 25.8). Сила сопротивления
![]() ,
где
,
где
![]() -
вес тела,
-
вес тела,
![]() - скорость его центра тяжести,
- скорость его центра тяжести,
![]() - постоянная во времени величина
(коэффициент).
- постоянная во времени величина
(коэффициент).
Т
К условию и решению
примера 25.8![]() .
.
Р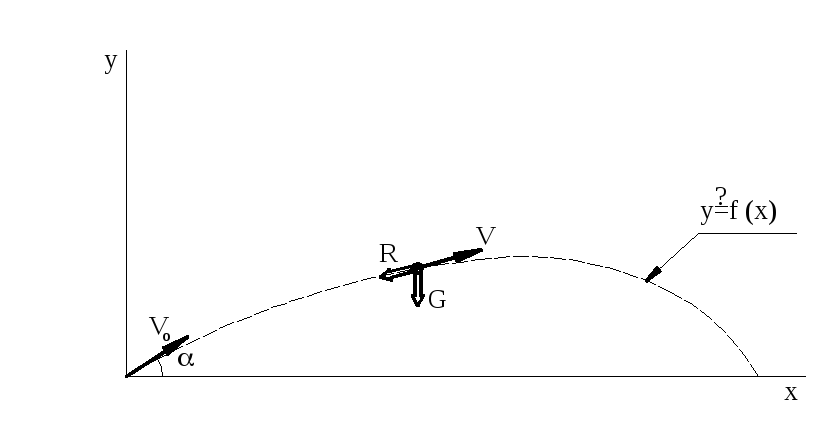 ешение.-
Основное уравнение динамики материальной
точки применительно к рассматриваемому
случаю:
ешение.-
Основное уравнение динамики материальной
точки применительно к рассматриваемому
случаю:
![]() .
.
Проектируем записанное вектор-ное
уравнение на оси
![]() и
и
![]() :
:
а
![]()
б
![]()
И
Рисунок 25.8![]() .
.
В левой и правой частях последнего выражения видим табличные интегралы. Интегрируя и используя начальные условия, получаем -
![]()
![]()
192
![]() .
.
Интегрируем последнее выражение и используем начальные условия:
![]() .
.
Откуда
![]()
и, поэтому:
в![]()
 .
.
Из (в):
г![]()
 .
.
Из (г), после алгебраических преобразований:
д![]()
 .
.
Теперь интегрируем дифуравнение (б):
![]()
![]() .
.
После
подстановки
![]() :
:
![]()
![]() .
.
После
переноса
![]() в
правую часть, вновь видим табличные
интегралы. После интегрирования
получаем:
в
правую часть, вновь видим табличные
интегралы. После интегрирования
получаем:
![]() .
.
193
Используяначальные условия находим:
![]() .
.
Поэтому
![]() .
.
Подставляя в последнее выражение (г) и (д), окончательно получаем:
![]() .
.
Замечание: опыты, проводившиеся со стрельбой артиллерийских снарядов, показали, что имеются диапазоны скоростей, когда сопротивление среды оказывается пропорциональным скорости (в баллистике - это закон Сиаччи); этот случай и был рассмотрен в примере 25.8. Но чаще сила сопротивления атмосферы направлена по касательной к траектории и пропорциональна квадрату модуля скорости летящего снаряда. Об этом в следующем примере.
ПРИМЕР 25.9.- Об
исследовании движения снаряда, когда
сила сопротивления среды определяется
формулой
![]() - это пример, иллюстрирую-щий
необходимость часто прибегать к численным
методам решения.
- это пример, иллюстрирую-щий
необходимость часто прибегать к численным
методам решения.
В рассматриваемом случае дифференциальные уравнения движения принимают вид:
![]() .
.
«Чистое» аналитическое решение записанной системы дифуравнений авторам неизвестно. Подобные уравнения рекомендуем решать численно - методом последовательных шаганий.-
![]() .
.
От бесконечно малых переходим к малым конечным величинам
![]() .
.
Длину
временного шага принимаем, к примеру,
![]() 0,0001
с.
0,0001
с.
1
16
Учитывая
известные (![]() ),
определяем значения
),
определяем значения
![]() ,
соответствующие моменту времени
,
соответствующие моменту времени
![]() :
:
194
![]() .
.
![]()
![]()
![]() .
.
2-й
шаг (определяются
значения
![]() для конца 0,0002-й секунды)
для конца 0,0002-й секунды)
![]() .
.
![]()
![]()
![]() .
.
3-й
шаг (определяются
значения
![]() для конца 0,0003-й секунды)
для конца 0,0003-й секунды)
![]() .
.
![]()
![]()
![]() .
.
И так далее
25.7. Обобщённая оценка проблемы решения задач динамики. Рекомендуемые подходы
В рассмотренных в предыдущем подразделе примерах силы были постоянными, функцией вектора скорости, квадрата скорости, времени и координаты, материальная точка имела 1 и 2 степени свободы. Даже в этих, относительно простых случаях, были видны сложности, с которыми инженеру приходится сталкиваться при попытках получить точные аналитические решения составленных дифференциальных уравнений.
В общем же случае главный вектор внешних, действующих на систему сил может являться одновременной функцией и времени, и координаты, и скорости; движения могут описываться не только отдельными дифференциальными уравнениями, но и системами. В связи с этим, рекомендациями ответим на естественный, возникающий у будущих специалистов, вопрос: «Какой в текущий момент жизни человеческого общества видится схема подхода инженера к возникающим в практической его деятельности задачам динамики, решаемым через интегрирования»?
П
25.13
 режде
всего, необходимо владеть опорными
фактами теоретической механики,
допустимыми методами их преобразования
и, на этой основе,уметь составлять
применительно к конкретным механическим
системам соответствующие уравнения.
режде
всего, необходимо владеть опорными
фактами теоретической механики,
допустимыми методами их преобразования
и, на этой основе,уметь составлять
применительно к конкретным механическим
системам соответствующие уравнения.
195
С точки зрения точностей, обозримости получаемых результатов и дальнейших их анализов, наиболее привлекательны «чистые» аналитические решения. И такие случаи довольно часты. По этой причине в проигрывающем положении оказывается тот инженер, который в составленных дифференциальных уравнениях не заметит табличных интегралов и начнёт использовать другие подходы к решению.
Если попытки самостоятельно проинтегрировать составленные дифференциальные уравнения не увенчались успехом, не забывать, что предшествующие поколения накопили большой опыт аналитических решений дифференциальных уравнений (часто увековечивая этим своё имя – Матье, Риккати, Абель, Бернулли, Клеро, Ламе, Лаплас, Лежандр и т.д.) и настоящий инженер обязан этим пользоваться. В частности, необходимо знать, что имеются, к примеру, такие книги: «Камке Э. Справочник по обыкновенным дифференциальным уравнениям.- М.: Наука, 1976.- 576 с.»; «Двайт Г.Б. Таблицы интегралов.- М.: Наука, 1966.- 228 с.» и другие подобные.
Если не привела к успеху и рекомендация по п.3, целесообразно проконсультироваться с математиками–специалистами по дифуравнениям.
Если и п.4 не помог, не отчаивайтесь – переходите к численным методам решения (что, в частности, было иллюстрировано примером 25.9). При этом, следует иметь ввиду, что при использовании современных ЭЦВМ подавляющее большинство возникающих в широкой инженерной практике задач динамики на интегрирование поддаются численным методам решения, что обязывает нас закончить советы возвратом к первой рекомендации, как к главной для будущего инженера, желающего стать хорошим специалистом; как к рекомендации, обепечивающей инженеру приоритет и инициативу перед другими специалистами, подключаемыми к процессу решения конкретных задач механики.