

34.3.2. Понятие об обобщённых силах.
Уравнения динамического равновесия в обобщённых силах
В
34.6
![]() .
.
Оно
справедливо для любого возможного
перемещения системы. Но для решения
конкретных задач все возможные перемещения
не нужны. Нужны лишь в количестве,
обеспечивающем составление максимума
независимых друг от друга уравнений, а
их
![]() (
(![]() - число степеней свободы механической
системы). Причём, нужны такие возможные
перемещения, при которых алгебраические
преобразования сводятся до минимума.
А там же (в разделе 32) было показано, что
простота достигается одиночными
вариациями обобщённых координат.
- число степеней свободы механической
системы). Причём, нужны такие возможные
перемещения, при которых алгебраические
преобразования сводятся до минимума.
А там же (в разделе 32) было показано, что
простота достигается одиночными
вариациями обобщённых координат.
В
развёрнутом виде эти простейшие, в
количестве
![]() ,
уравнения предстают в виде столбца
уравнений из
,
уравнения предстают в виде столбца
уравнений из![]() строк, с соответствующими нижними
индексами, а в свёрнутом виде:
строк, с соответствующими нижними
индексами, а в свёрнутом виде:![]() .
.
319
Делим
левую и правую части записанного
уравнения на вариацию
![]() -той
обобщённой координаты (на
-той
обобщённой координаты (на![]() ).
Получающиеся отношения называют:
).
Получающиеся отношения называют:![]() -
-![]() -тая
внешняя обобщённая сила;
-тая
внешняя обобщённая сила;![]() -
-![]() -тая
внутренняя обобщённая сила;
-тая
внутренняя обобщённая сила;![]() -
-![]() -тая
обобщённая сила инерции.
-тая
обобщённая сила инерции.
Итак, получены
уравнения возможных работ и
мощностей в обобщённых силах
-
б
![]() .
.
Рекомендация по вычислению обобщённых сил
 ,
где
,
где
![]() - возможная скорость
- возможная скорость
![]() -той
точки, выраженная в долях скорости
-той
точки, выраженная в долях скорости![]() одиночной вариации
одиночной вариации![]() -той
обобщённой координаты (или – передаточное
отношение от
-той
обобщённой координаты (или – передаточное
отношение от![]() -той
обобщённой координаты к
-той
обобщённой координаты к![]() -тому
объекту механической системы – частице,
телу). Итак,
-тому
объекту механической системы – частице,
телу). Итак,
ф ормулы
для вычисления обобщённых сил:
ормулы
для вычисления обобщённых сил:
![]() ,
где
,
где
![]() - вектор передаточного
отношения от
- вектор передаточного
отношения от
![]() -той
обобщённой коор-динаты к
-той
обобщённой коор-динаты к![]() -той
точке.
-той
точке.
Т.к.
результат не зависит от скорости вариации
обобщённой координаты (см. раздел 32),
то при конкретных расчётах скорости
вариаций обобщёнными координатами (![]() )
можно принимать равными единице (делить
на единицу всегда проще), например 1
м/с.
)
можно принимать равными единице (делить
на единицу всегда проще), например 1
м/с.
34.3.4 Три математические зависимости, используемые
в непосредственном выводе уравнений Лагранжа 2-го рода
Действительная
скорость
![]() -той
частицы:
-той
частицы:
![]() применяем
правило взятия производной функции
многих переменных =
применяем
правило взятия производной функции
многих переменных =
![]() Т.к.
Т.к.
320
![]() ,
то в записанных частных от него
производных не могут появиться обобщённые
скорости. Поэтому:
,
то в записанных частных от него
производных не могут появиться обобщённые
скорости. Поэтому:
в![]()
 .
.
Из множества возможных движений частиц принимаем подмножество, описываемое выражением:
![]() ,
,
которое
в свою очередь, сужаем до
![]() - ограничиваемся одиночными вариациями
обобщённых координат. Тогда:
- ограничиваемся одиночными вариациями
обобщённых координат. Тогда:
![]() и при
и при
![]() ,
о допустимости чего уже говорилось,
получаем:
,
о допустимости чего уже говорилось,
получаем:
г![]()
 .
.
Для третьей математической зависимости используем правило взятия производной от произведения двух функций:
![]()
д![]()
 .
.
34.3.5. Непосредственный вывод уравнений Лагранжа 2-го рода
Начинаем с (б):
 учитываем
(д)=
учитываем
(д)=
 ,
где:
,
где:

321
 ;
;
а
 .
.
Итак, получены
у равнения
Лагранжа 2-го рода:
равнения
Лагранжа 2-го рода:
34.7
![]() .
.
З
К примеру 34.1 - на уравне-нения Лагранжа 2-го рода
амечание: для механических систем
с идеальными связями, что часто принимается
в практике расчётов (с целью преодоления
проблем, возникающих при учёте внутренних
сил),![]() .
.
П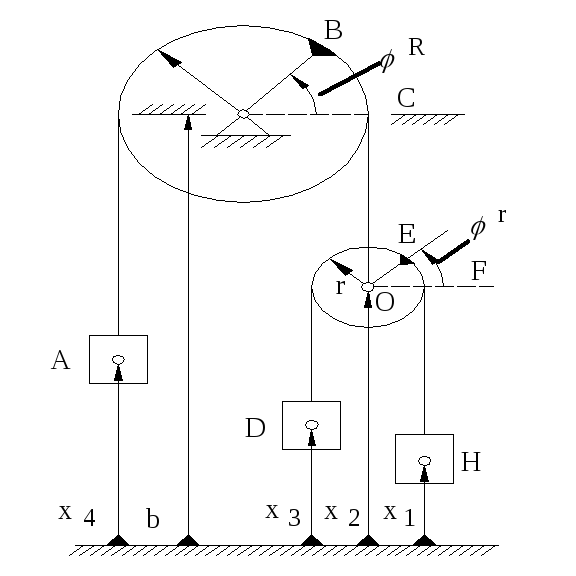 РИМЕР
34.1.-Двухтросовая
система, с тремя грузами, неподвижным
и подвижным шкивами
РИМЕР
34.1.-Двухтросовая
система, с тремя грузами, неподвижным
и подвижным шкивами
Д
Рисунок 34.2![]() - координаты, определяющие положения
тел
- координаты, определяющие положения
тел
![]() .
Их массы:
.
Их массы:
![]() кг;
кг;
![]() кг;
кг;
![]() кг;
кг;
![]() кг.
Ось
кг.
Ось
![]() вращения подвижного шкива (радиуса
вращения подвижного шкива (радиуса
![]() м
и имеющего жёлоб под нерастяжимый трос
м
и имеющего жёлоб под нерастяжимый трос
![]() )
соединена с грузом
)
соединена с грузом
![]() также нерастяжимым тросом
также нерастяжимым тросом
![]() ,
который переброшен через шкив
,
который переброшен через шкив
![]() (с неподвижной осью вращения и жёлобом
под этот трос; его радиус
(с неподвижной осью вращения и жёлобом
под этот трос; его радиус
![]() м).
Угловые положения шкивов определяются
переменными
м).
Угловые положения шкивов определяются
переменными
![]() - подвиж-ного и
- подвиж-ного и
![]() - неподвижного шкивов.
- неподвижного шкивов.
![]() -
-
322
подвижная горизонталь. Моменты инерции
шкивов:
![]() кгм2;
кгм2;
![]() кгм2.
кгм2.
Требуется.- Определить ускорения всех тел.
Решение.- Положение системы определяется 6-ю координатами. Записываем уравнения связей и из них, взяв производные, устанавливаем связи между скоростями и ускорениями:

![]() ,
,
![]() ;
;
б
![]()

 ,
,
![]() ;
;
в
![]()
 ,
,
![]() ;
;
г![]()
 ,
,
![]() .
.
Видим, что шесть координат связаны между собою 4-мя уравнениями. Поэтому число степеней свободы рассматриваемой системы равно двум.
За
обобщённые координаты принимаем
![]() .
.
Находим выражение кинетической энергии через обобщённые скорости:
34.8![]()

Видим,
что
![]() .
.
Теперь находим выражения частных производных от кинетической энергии по обобщённым скоростям:
![]()
![]()
323
![]() ;
;
![]()
а![]()
![]()
![]() .
.
Итак,
![]() .
.
Теперь вычисляем обобщённые силы.
Скорость
вариации 1-й обобщённой координаты
принимаем сонаправленной с
![]() и по модулю равной 1. Тогда
и по модулю равной 1. Тогда
![]()
![]() .
.
Рекомендация:
ч тобы
не запутываться со знаками (плюс или
минус) скорости вариаций обобщённых
координат направляйте в сторону
положительного отсчёта самих координат.
тобы
не запутываться со знаками (плюс или
минус) скорости вариаций обобщённых
координат направляйте в сторону
положительного отсчёта самих координат.
Скорость
вариации 2-й обобщённой координаты
принимаем сонаправленной с
![]() и по модулю также равной 1. Тогда
и по модулю также равной 1. Тогда
![]()
![]() .
.
Итак, составлена система 2-х уравнений:
![]() .
.
Из которых:
![]() м/с2;
м/с2;
![]() м/с2.
м/с2.
Из
(а)
- (г):
![]() м/с2;
м/с2;
![]() м/с2;
м/с2;
![]() ;
;
![]() .
.
324