

7. Режими моделювання систем в програмі Simulink (меню Simulation)
Не дивлячись на те, що меню Simulation (моделювання) містить всього декілька команд (рис. 3.23), саме вони грають основну роль при проведенні досліджень моделі. За допомогою цих команд розробник дістає можливість не лише динамічно управляти сеансом моделювання, але і змінювати багато найважливіших параметрів моделі, такі, наприклад, як спосіб зміни модельного часу, алгоритм розрахунку і формат представлення результатів моделювання.
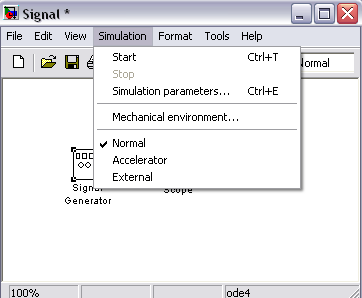
Рис. 3.23. Меню Simulation
Розглянемо детальніше за засіб управління моделлю і параметрами сеансу моделювання, які надає дослідникові вікно Simulation Parameters (параметри моделювання), рис. 3.24. Елементи управління на вкладці Solver зібрані в три групи.
Simulation time (інтервал моделювання) - вибір інтервалу моделювання за допомогою вказівки початкового (Start time) і кінцевого (Stop time) значень модельного часу.

Рис. 3.24. Вікно установки параметрів моделювання
Solver options (параметри розрахунку) - вибір методу реалізації (розрахунку) моделі.
Output options (параметри виведення) - параметри виведення вихідних параметрів модельованої системи (при моделюванні зі змінним кроком).
Під вибором методу реалізації моделі мається на увазі наступне. Маючи структуру досліджуваної системи у вигляді блок-діаграми, розробник може вибрати метод відображення ходу моделювання. За допомогою двох списків Type (Тип), що розкладаються, система може бути реалізована в наступних формах:
з дискретними станами і дискретним часом переходу з одного стану в інший;
з дискретними станами і безперервним часом переходу;
з безперервними станами і дискретним часом переходів;
з безперервними станами і безперервним часом переходів.
Перший список (ліворуч) дозволяє вибрати спосіб зміни модельного часу:
Variable - step (змінний крок) - моделювання зі змінним кроком;
Fixed - step (фіксований крок) - моделювання з фіксованим кроком.
Другий список (справа) дозволяє вибрати метод розрахунку нового стану системи. Перший варіант (discrete) забезпечує розрахунок дискретних станів системи. Інші пункти списку забезпечують вибір методу розрахунку нового стану для безперервних систем. Ці методи розрізняються для змінного (Variable - step) і для фіксованого (Fixed - step) кроку часу, але грунтовані на єдиній методиці - рішення звичайних диференціальних рівнянь (ode).
Нижче двох списків Type, що розкриваються, знаходиться поле, назва якого змінюється залежно від обраного способу зміни модельного часу (рекомендується залишити параметри за замовчуванням).
Параметри інших вкладок також можна використати за замовчуванням.
ПРОГРАМА ЛАБОРАТОРНОЇ РОБОТИ
Вивчити особливості синтезу КІХ-фільтрів методами вагових функцій, частотної вибірки, а також чисельними методами.
Виконати в пакеті програм Mathcad синтез КІХ-фільтру по алгоритму усереднювання, розрахувати коефіцієнти передатної функції ЦФ, перевірити відповідність частоти зрізу заданим вимогам. Знайти перехідну характеристику фільтру.
Виконати в пакеті програм MATLAB синтез КІХ-фільтрів методами вагових функцій Кайзера, за критерієм мінімального СКП і рівнохвилевому критерію. Розрахувати коефіцієнти передатної функції ЦФ, перевірити відповідність АЧХ заданим вимогам. Знайти перехідну характеристику фільтру. Знайти відгуки фільтру на гармонійні сигнали в смузі пропускання і смузі затримання, оцінити виборчі властивості фільтру.
ПОРЯДОК ВИКОНАННЯ ЛАБОРАТОРНОГО ЗАВДАННЯ
1. Підготувати і ввести в програму початкові дані (п. 2.2.1) відповідно до заданого варіанту (по номеру комп'ютера), необхідні для синтезу цифрового ФНЧ : алгоритм - усереднювання по N-відлікам (п. 2.2); частота зрізу Fзр; коефіцієнт підсилення K0; частота дискретизації Fд=16 кГц.
Варіант |
Fзр |
K0 |
Варіант |
Fзр |
K0 |
1 |
100 Гц |
10 |
16 |
470 Гц |
47 |
2 |
130 Гц |
13 |
17 |
500 Гц |
50 |
3 |
150 Гц |
15 |
18 |
530 Гц |
53 |
4 |
170 Гц |
17 |
19 |
550 Гц |
55 |
5 |
200 Гц |
20 |
20 |
570 Гц |
57 |
6 |
230 Гц |
23 |
21 |
600 Гц |
60 |
7 |
250 Гц |
25 |
22 |
630 Гц |
63 |
8 |
270 Гц |
27 |
23 |
650 Гц |
65 |
9 |
300 Гц |
30 |
24 |
670 Гц |
67 |
10 |
330 Гц |
33 |
25 |
700 Гц |
70 |
11 |
350 Гц |
35 |
26 |
750 Гц |
75 |
12 |
370 Гц |
37 |
27 |
800 Гц |
80 |
13 |
400 Гц |
40 |
28 |
850 Гц |
85 |
14 |
430 Гц |
43 |
29 |
900 Гц |
90 |
15 |
450 Гц |
45 |
30 |
950 Гц |
95 |
Підібрати порядок фільтру N для забезпечення необхідної частоти зрізу і коефіцієнта підсилення на постійному струмі (п. 2.2-2.5).
Оцінити відхилення частоти зрізу фільтру від заданої.
Показати коефіцієнти передатної функції і АЧХ.
2. Створити модель фільтру (п. 6.1) в програмі Simulink.
Підготувати і ввести в програму початкові дані (п. 6.1) відповідно до заданого варіанту (по номеру комп'ютера), необхідні для синтезу цифрового смугового фільтру (СФ): метод розрахунку - вагові функції Кайзера (п. 3.3, 6.1); центральна частота смуги пропускання Fзр; коефіцієнт підсилення K0, смуга пропускання F=0.1 Fзр; пульсації в смузі пропускання - 3 дБ; послаблення на частоті Fstop1=0.5 Fзр 60 дБ; на частоті Fstop2=2 Fзр - 80 дБ.
Частоту дискретизації Fs встановити рівною 16 кГц.
Фільтр повинен мати мінімальний порядок.
3. Зробити синтез фільтру. Переглянути і проаналізувати наступні параметри фільтру: коефіцієнти передатної функції, АЧХ.
4. Подати на вхід ЦФ одиничну ступінчасту дію (п. 6.5) і вичислити перехідну характеристику системи.
5. Подати на вхід ЦФ гармонійний сигнал (п. 6.3) з частотою Fx рівній частоті Fзр і одиничною амплітудою. Побудувати графіки вхідного і вихідного сигналу. Оцінити виборчі властивості фільтру.
6. Повторити п.5 для гармонійного сигналу з частотою Fx=1.5 Fзр.
7. Повторити пункти 2 - 6 для цифрового смугового фільтру (СФ), розрахованого за рівнохвилевом критерієм Equiripple (п. 6.1, 2.5) : центральна частота смуги пропускання Fзр; коефіцієнт підсилення K0, смуга пропускання F=0.1 (Fзр; пульсації в смузі пропускання - 3 дБ; послаблення на частоті Fstop1=0.5 Fзр 60 дБ; на частоті Fstop2=2 Fзр - 80 дБ.
Частоту дискретизації Fs встановити рівною 16 кГц.
Порядок фільтру має дорівнювати порядку фільтру, розрахованого методом вагових функцій Кайзера, п. 2-6.
8. Повторити пункти 2 - 6 для цифрового смугового фільтру (СФ), розрахованого за критерієм мінімального СКП Least, - squares (п. 6.1, 2.5) : центральна частота смуги пропускання Fзр; коефіцієнт підсилення K0, смуга пропускання F=0.1 Fзр; пульсації в смузі пропускання - 3 дБ; послаблення на частоті Fstop1=0.5 Fзр 60 дБ; на частоті Fstop2=2 Fзр - 80 дБ.
Частоту дискретизації Fs встановити рівною 16 кГц.
Порядок фільтру має дорівнювати порядку фільтру, розрахованого методом вагових функцій Кайзера, п. 2-6.