

Лабораторная работа № 4 формирование 3d изображений
Цель работы: Изучение основ методов считывания 3D форм объектов, в основном, ориентируясь на методы триангуляции, применение их в задачах контроля и восстановления формы поверхности изделий и формировании наполнения виртуальных миров.
Введение: В последнее десятилетие, резко возрос коммерческий интерес к объемным изображениям, как к естественным для человека информационным конструкциям, служащим для понимания окружающего мира. И хотя уже много лет в конструировании, виртуальных лабораториях, тренажерах, компьютерных играх и т. п. 3D технологии составляют базовое наполнение, такое возрастание массового интереса неожиданно и сулит большую перспективу. Компьютеры уже сегодня оснащаются 3D графическими процессорами в десятки раз опережающие центральные процессоры по производительности. Наиболее просто получить информацию о третьей координате – z методами триангуляции.
Принцип триангуляции заключается в восстановлении характеристик объекта (линейных размеров, формы, построении 3D-образов) на основе сканирования объекта зондом и регистрации откликов матричными фотоприемниками с последующей математической обработкой данных. При этом между осью зонда и осью оптической системы выдерживается угол, достаточный для ухода отклика по координатам x или y при смещении точки встречи зонда и контролируемой поверхности по z. Примером установок, использующих принцип лазерной триангуляции, служат 3D сканеры, обобщенная схема которых приведена на рис. 0.6 и рис. 4.1.
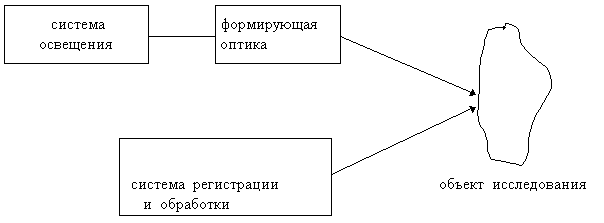
Рис. 4.1. Обобщенная схема 3D сканера
Часто в качестве источника излучения используют полупроводниковый лазер. Лазерный зонд проецируется на объект в виде узкой полосы или множества точек. Отклик фиксируется расположенной под определенным углом видеокамерой. Посредством обработки результатов восстанавливают контуры объекта в местах контакта зонда с поверхностью.
Оптическая схема, приведенная на рис.4.2, более детально поясняет суть метода лазерной триангуляции. По положению пятна на фотоприемнике можно судить о смещении объекта. Цифровая фильтрация позволяет добиться субпиксельного разрешения в профилометрии (10 нм при динамическом диапазоне 10 000).
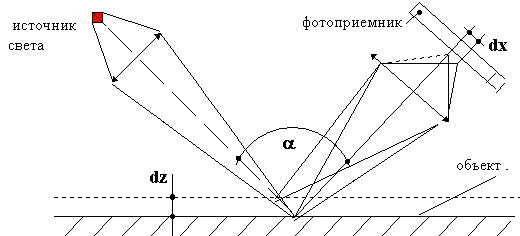
Рис. 4.2. Схема контроля положения объекта
Рис. 4.2 и рис. 0.6 представляют два крайних решения по выбору триангуляционной схемы. В первом случае (рис. 0.6) используется сектор индикатрисы рассеивания, явно не лежащий на оси зеркального отражения, во втором ось видеокамеры совпадает с осью отраженного луча. Данные особенности изменяют конструкцию и характеристики приборов.
Первым этапом в лабораторной работе является этап моделирования сигналов. Пример такого моделирования приведен в L4_мод.xmcad.
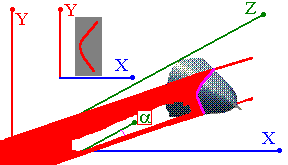
Рис 4.3. Схема моделирования процесса измерения
Камера смотрит вдоль Z (рис.4.3), лазерный зонд освещает объект (нос самолета). Форма объекта – поверхность 2-го порядка. Далее для простоты: ось симметрии объекта параллельна X; форма поверхности не зависит от X т. е. это цилиндр с основанием заданной формы и параллельный оси X; лазерные лучи параллельны плоскости ZOX и образуют с осью Z угол.
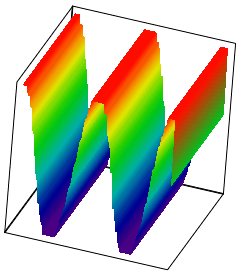
В расчеты вводят шумы и т. п. Результирующий сигнал с учетом формы индикатрисы рассеивания представлен на рис. 4.4. Для анализа поверхностей, используют более сложные генераторы поверхностей (например: L4_Indikatrisa_Profil.xmcad рис. 4.5).
|
|
Рис. 4.4. Модель сигнала с камеры |
Рис. 4.5. Модель поверхности |
Модель гофрированной поверхности и прикидочный расчет ее формы приведены ниже (рис. 4.6).
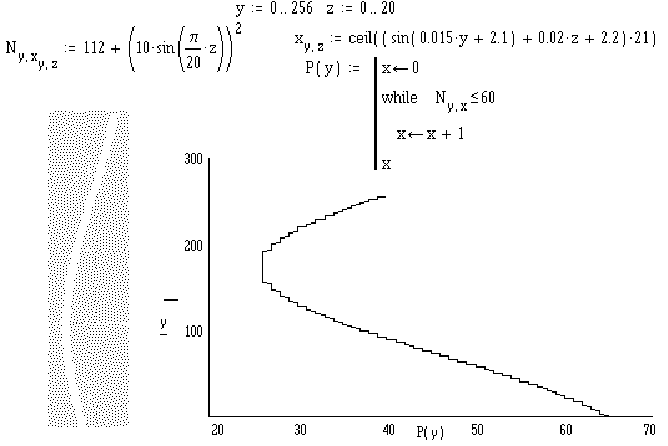
Рис. 4.6. Эскизный расчет профиля гофрированной поверхности
Второй этап, как правило, включает в себя калибровку системы. В простейшем случае – это определение коэффициента чувствительности.
Рис.4.7 и рис 4.8 отображают отклики при двух положениях (обычно крайних) эталонной плоскости (смещение по Z равно КР и замеряется отдельно) и сигналы для отдельной строки матричного фотоприемника.
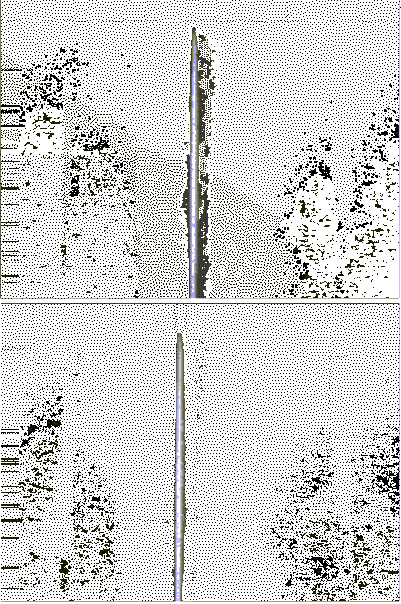
Рис.4.7. Отклики от эталонной плоскости в крайних положениях
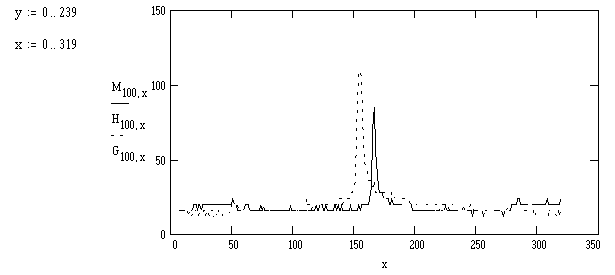
Рис.4.8. Интенсивность зарегистрированного излучения (100-я строка) в двух положениях
Расчеты положения максимумов и определение чувствительности в простейшем случае описаны ниже (рис.4.9).
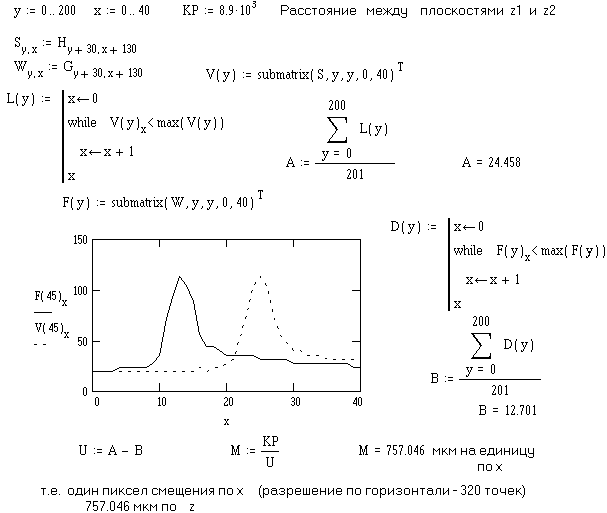
Рис.4.9. Эскизный расчет чувствительности
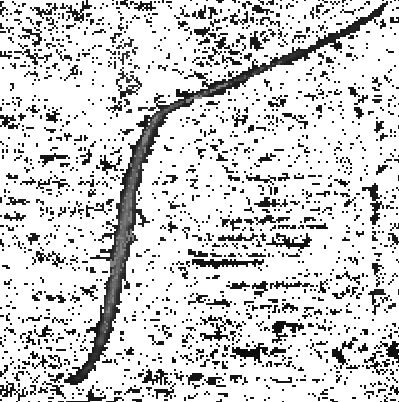
Рис. 4.10. Отклик от реборды колеса железнодорожного локомотива
Приведем пример построения профиля объекта сложной формы (реборды колеса железнодорожного локомотива) с предварительной калибровкой системы. На рис. 4.10 приведен отклик от сложного объекта на сформированный в линию лазерный пучок и на рис. 4.11 – результаты расчета.

Рис.4.11. Результаты оценки профиля: B– толщина, H – высота
Описание стенда: Работа выполняется на стенде объемных портретов. В состав стенда входят видеокамера, компьютер, объект исследования, лазерный излучатель, источники питания лазерного излучателя и камеры. Стенд представлен двумя рабочими местами: 1 - с лазерным излучателем и оптикой формирования “полосы”; 2 – с прожектором и набором масок позволяющих формировать матрицы зондов различной формы и считывать текстуры объектов. На втором рабочем месте, кроме перечисленных устройств, установлена Web-камера Prestigio PWC320S. Второе рабочее место в основном связано с выполнением КСР, однако набор рабочих файлов для нее необходимо получить при выполнении лабораторной работы №4.
Лабораторное задание: Изучить материалы к лабораторной работе, ознакомиться со стендом. В работе используется четырех - канальный видеорегистратор. Руководство пользователя программного обеспечения серии BDx имеется на компьютере стенда. Для выполнения работы достаточно использовать только функции захвата кадра.
Включить камеру, запустить программу (при запросе пароля, установите 1111) и добиться появления изображения на мониторе компьютера.
Включить источник лазерного излучения и направить его на объект.
Зафиксировать 3 кадра при различном положении эталонной поверхности. Провести калибровку системы. Определить чувствительность системы.
По заданию преподавателя произвести считывание профиля объекта сложной формы. Определить характеристики исследуемого объекта (восстановить профиль).
На втором рабочем месте зафиксируйте для последующего выполнения КСР файлы изображений эталонной плоскости в двух крайних положениях (расстояние между положениями измерьте).
На втором рабочем месте зафиксируйте для последующего выполнения КСР файлы изображений текстуры и освещенного структурированным светом объекта, выбранного Вами и согласованного с преподавателем.