

Лабораторная работа № 1 числоимпульсные методы
В ФИЗИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЯХ ИЗОБРАЖЕНИЙ.
Цель работы: Освоение методик формирования изображений и цифровых методов преобразования сигналов в микронном диапазоне размеров.
Введение: Современное машиностроение уверенно осваивает микронный диапазон точностей. Глаз человека, органы перемещения машин, роботов оснастили новыми системами построения и анализа изображений в этом диапазоне. Понятие топологической нормы в микроэлектронике играет важную роль. Многие достижения в технологии в конечном итоге отображаются в минимальном размере элемента, который может быть устойчиво получен в производстве сверхбольших интегральных схем (СБИС). Цифры 1.2 мкм, 0.8 мкм, 0.6 мкм, 0.25 мкм, 0.18 мкм, 0.12 мкм, 0.02 мкм … – это вехи и ориентиры развития микроэлектроники переходящей плавно в наноэлектронику. Производство печатных плат совершенно тогда, когда обеспечивается стабильность размеров проводников, их точное расположение на различных слоях платы. Значительная доля визуального контроля в машиностроительном производстве также приходится на контроль размеров.
Приборы для контроля размеров представлены чрезвычайно широко.
Первую группу составляют контактные приборы – электронные штангенциркули, электронные микрометры и т. п. В большинстве своем они построены на базе штриховых шкал. Обычно, кроме аттестованной основной шкалы, присутствует шкала-индикатор, образующая с основной муаровое сопряжение. Обработка информации производится специализированными СБИС или микроконтроллерами.
Муаровые сопряжения служат для интегрирования светового потока, прошедшего через несколько сотен штрихов. При этом обеспечивается снижение влияния на результат измерения таких факторов, как качество изготовления индивидуального штриха, оптических неоднородностей стекла, пыли и т.п.
Описание стендов: Работа проводится на стенде микронных портретов
(СМП), и на стенде нанометровых смещений (СНС).
Стенд микронных портретов включает в себя устройство смещения на базе линейного электродвигателя, растрового датчика линейного смещения с системой индикации, инструментального микроскопа и вынесенного муарового сопряжения с источником света (рис. 1.1).
Датчик линейного смещения (рис. 1.2.) формирует текущее изображение участка стеклянной шкалы 1. Считывающая головка 2, 3 усредняет погрешности изготовления каждого из штрихов и уменьшает влияние пыли. Излучение светодиода 4 конденсором 5 направляется на шкалу. При применении 4-х фотоприемников используют муаровое сопряжение (рис.1.3а.). Считывающая головка содержит вспомогательную шкалу, смещенную относительно основной на угол (рис.1.3б.), который обеспечивает усреднение оптического сигнала в зоне чувствительных элемента фотодиодов. Муаровое сопряжение представлено на стенде раздельно.
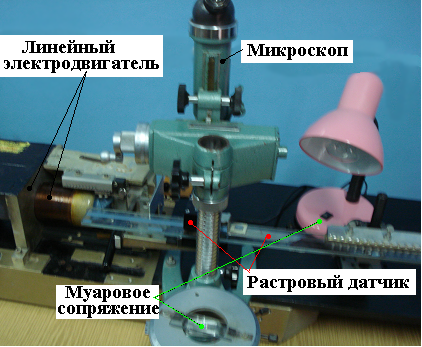
Рис. 1.1. Стенд микронных портретов
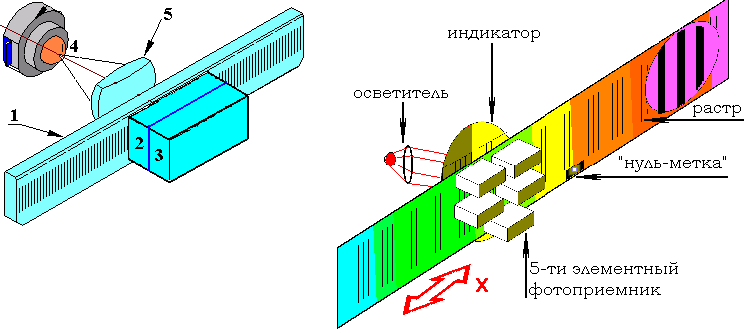
Рис. 1.2. Датчик линейного смещения (2 варианта)
Муар
формируется, как изображение в малой
зоне от решетки и реально расстояние
между решетками
![]() ограничено дифракцией.
ограничено дифракцией.
![]() ,
где
,
где
![]() -
шаг решетки,
-
шаг решетки,
![]() - длина волны излучения светодиода.
- длина волны излучения светодиода.
Реально
при
![]() мкм
мкм
![]() мкм. Обеспечение более низких значений
расстояния затруднено в подавляющем
большинстве конструкций станков и
других приборов. Данный факт устанавливает
и нижний порог целесообразности
использования растровых датчиков,
которые отличаются предельно низкой
стоимостью комплекта.
мкм. Обеспечение более низких значений
расстояния затруднено в подавляющем
большинстве конструкций станков и
других приборов. Данный факт устанавливает
и нижний порог целесообразности
использования растровых датчиков,
которые отличаются предельно низкой
стоимостью комплекта.

Рис. 1.3. Муаровое сопряжение (~ 4 градуса)
В
качестве фотоприемников, как правило,
применяются четыре элемента, сдвигаемые
по муару на
![]() периода муара, а размер чувствительной
площадки фотоприемника близок к половине
периода муаровой шкалы. Более детально
конструктивные особенности растрового
датчика можно изучить по эскизам,
представленным на рис. 1.4.
периода муара, а размер чувствительной
площадки фотоприемника близок к половине
периода муаровой шкалы. Более детально
конструктивные особенности растрового
датчика можно изучить по эскизам,
представленным на рис. 1.4.
Основную
точность обеспечивает качество исполнения
стеклянной шкалы, интегрированная
точность нанесения штрихов. На рис.1.5
представлен метрологический сертификат
шкалы стенда. Фотоприемники
стенда снимают квадратурные сигналы.
Попарно вычитая их, получают
сбалансированные гармонические сигналы
без постоянных составляющих и сдвинутые
по фазе на
![]() рис.1.6.
рис.1.6.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
(1.1)
,
(1.1)
где d – шаг растра;
x – координата;
![]() – амплитуда гармонического сигнала;
– амплитуда гармонического сигнала;
![]() – постоянная составляющая.
– постоянная составляющая.
Настройкой
обеспечивается равенство
![]() ,
,
![]() .
.
После вычитания получают разностные сигналы:
![]() ;
;
![]() .
.
Следующей задачей блока электронной обработки является интерполяция периода сигнала (повышение разрешающей способности) и формирование импульсов, подсчет которых позволяет определить величину перемещения.
Наиболее
простое решение – бинаризация сигналов
![]() =U1,
=U1,
![]() =U2
при пороговом уровне
=U2
при пороговом уровне
![]() .
.
Сигналы бинаризуют и формируют по фронту и срезу счетные импульсы (производная по смещению в этих точках максимальна и, следовательно, влияние шумов минимально). Одновременно решается проблема выявления направления движения. Например: переход с единицы в ноль по синусоидальному сигналу при равенстве косинусоидального сигнала нулю соответствует движению вперед, тот же переход при косинусоидальном сигнале равном единице – движению назад. В синхронных схемах с запоминанием предыдущего кода, задача решается в рамках комбинационной логики.
При движении вправо фронт сигнала U1 появится при U2 = 1,
срез сигнала U1 – при U2 = 0.
При движении влево фронт сигнала U1 появится при U2 = 0,
срез сигнала U1 – при U2 = 1.
Очевидно, указанные комбинации распознаваемы. Аналогичные рассуждения можно привести для определения знака счетных импульсов, вырабатываемых по U2.
Интерполяция с большей разрешающей способностью выполняется путем формирования совокупности сдвинутых на заданные доли периода сигналов. Счетные импульсы с учетом направления движения подсчитываются реверсивным счетчиком либо таймерами микроконтроллера. Качество сборки,
юстировки растровых датчиков определяются по виду выходных сигналов, при этом развертка луча производится одним из пары сигналом:
Представленная на рис.1.6. модель интерполирует периода сигнала на 4. Т.е. приход каждого импульса соответствует смещения на четверть периода. Для данного датчика это 2.5 мкм. Такая дискретность не достаточна. Дальнейшее повышение коэффициента интерполяции возможно несколькими путями. Один из них – формирование дополнительных пар сигналов сдвинутых по фазе.
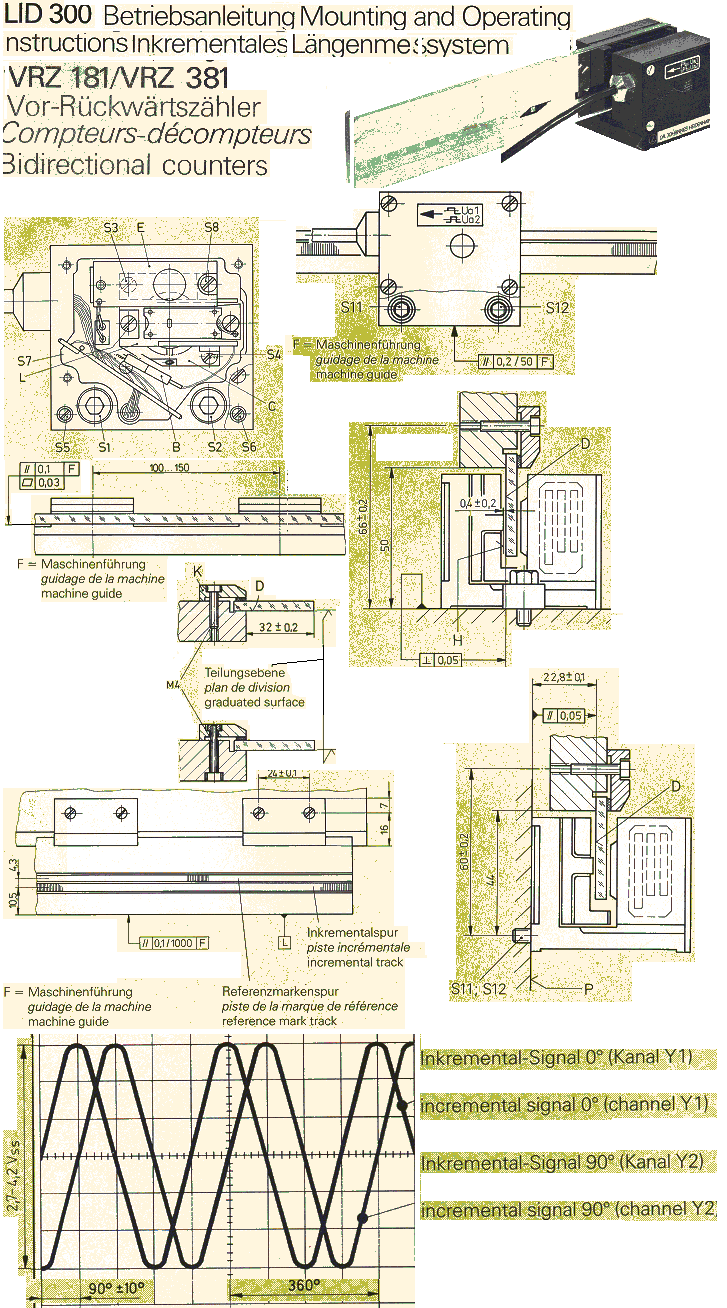
Рис. 1.4. Эскизы считывающей головки стенда
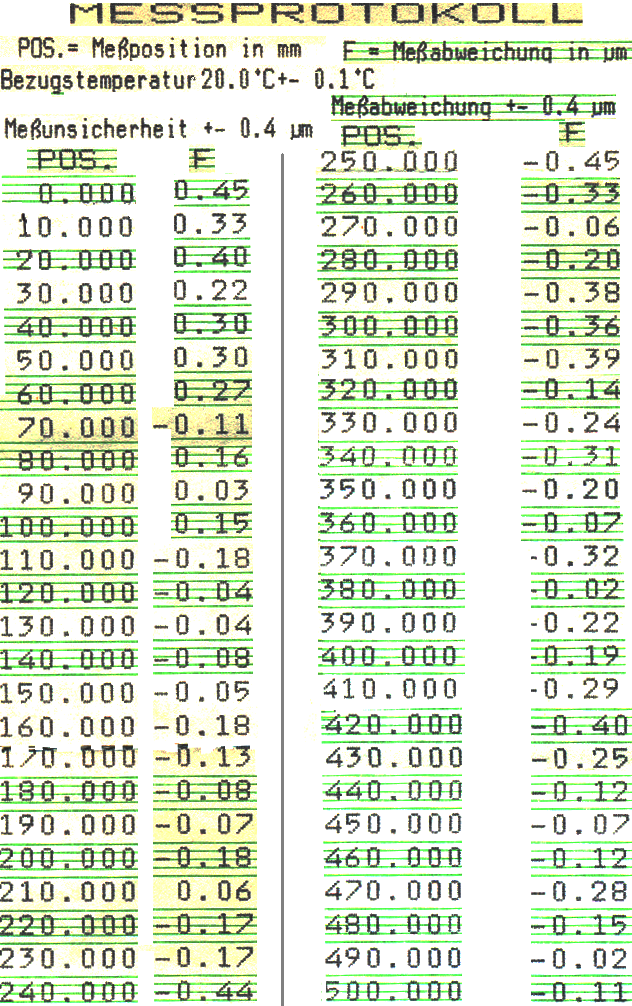
Рис. 1.5. Метрологический сертификат измерительной системы
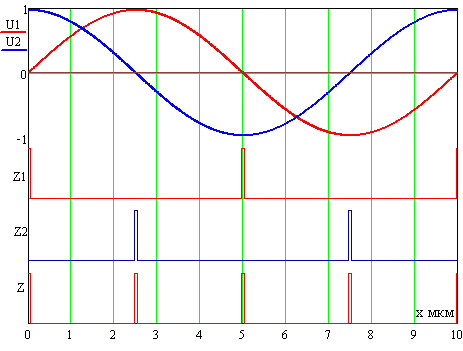
Рис. 1.6. Интерполяция на 4
Сложение
входных сбалансированных сигналов для
получения сдвинутых на
![]() новых
пар, выполняется обычно по схеме рис.1.7.
При этом коэффициенты суммирования
определятся по формулам:
новых
пар, выполняется обычно по схеме рис.1.7.
При этом коэффициенты суммирования
определятся по формулам:
![]()
Результат при = 10 градусам представлен на рис. 1.8.
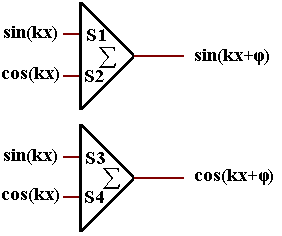
Рис. 1.7. Пара сигналов для детальной интерполяции
Такой подход позволяет интерполировать сигналы до нескольких сотен раз и поддерживается специализированными микросхемами. В датчике стенда цена импульса равна 0.5 мкм при шаге шкалы 10 мкм, т.е. коэффициент интерполяции 20, сформировано дополнительно 4 пары сигналов, сдвинутых по фазе на i*36°, где i номер пары 1…4.
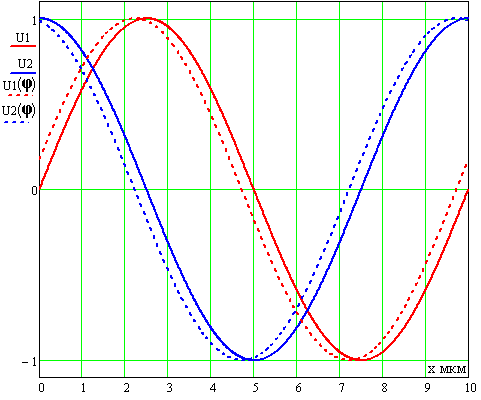
Рис. 1.8. Сдвинутые сигналы (на 10 градусов)
Юстировка таких систем достаточно сложна и требует специализированного оборудования и приспособлений. Покажем, как, в простейшем случае, использовать осциллограф.
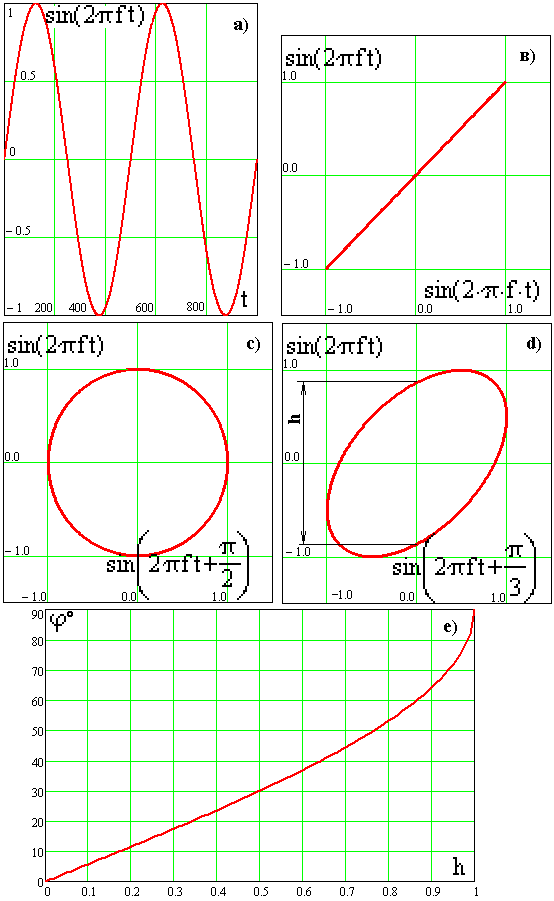
Рис. 1.9. Настройка датчиков, фигуры Лиссажу
Один из сигналов сдатчика приведен на рис.1.10.
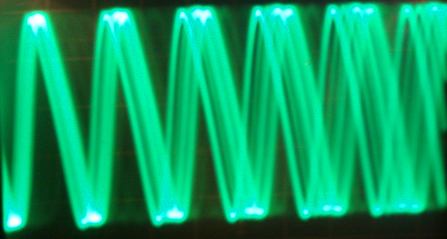
Рис. 1.10. Один из сбалансированных сигналов
Если скорость смещения постоянна, то сигнал на экране приобретет вид гармонического сигнала (рис.1.9а). В этом случае, развертка осуществляется по времени.
Если развертку производить вторым сигналом, получим изображения фигур Лиссажу, форма которых зависит от сдвига фаз (рис. 1.9 b,c,d). Измеряя параметры фигуры можно рассчитать величину сдвига фазы (рис. 1.9 d,e).
На рис. 1.11. показан результат удовлетворительной юстировки, обеспечивающий равномерность отсчетов внутри интервала интерполяции. На рис. 1.12. приведены показания датчика со стенда.
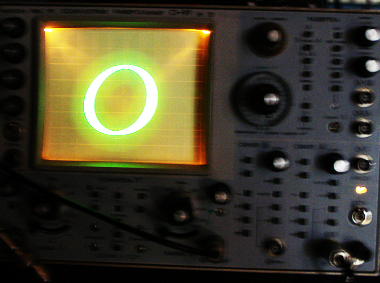
Рис. 1.11. Фигура Лиссажу отстроенного датчика

Рис. 1.12. Отсчет в 4605 мкм
Сегодня считывающие головки, если позволяют временные допуски, могут базироваться и на многоэлементных линейных фотоприемниках, сигналы с которых поступают на процессор сигналов или микроконтроллер, рассчитывающий положение шкалы.
Стенд нанометровых смещений (СНС) дает возможность сместить объект на десятки нанометров с контролем величины смещения. Для контроля таких смещений нужны более точные датчики. Интерферометры будут рассмотрены в третьей лабораторной работе.
Более дешевые, с минимальными требованиями к когерентности излучения датчики строят на базе дифракционных решеток амплитудных или фазовых. Профиль решетки оптимизируется для получения максимума энергии во рабочем порядке.
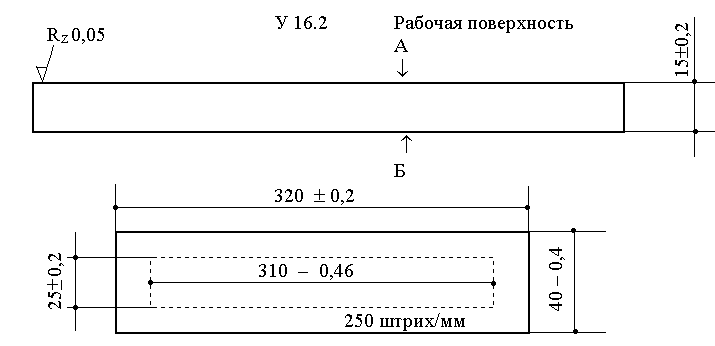
Рис. 1.13. Чертеж заготовки для отражающей дифракционной решетки
Технические требования к дифракционной решетке
Фаски на ребрах 0,7+0,8х 45 ; Фаски на углах 1,5+0,5х 45
Поверхность Б не должна быть выпуклой. В рабочей зоне не допускаются расшлифованные пузыри.
Накопленная погрешность на 300 мм не более 10 мкм
Дву лучепреломление |
2 |
N A на 100 N A P0 Q |
3 1 1–10 3’ |
На рабочую поверхность нанести копию дифракционной решетки, отражающую 250штр/мм по РТМЗ–260–72. Стекло К–8 ГОСТ 3514–76.
Разворот по осям X, Y, Z
2” расстояние
10” 10 0,2 мм
б) прозрачная
Неперпендикулярность штрихов решетки, линий пересечения поверхностей А, Г и АВ должна быть не более 130
Б – просветление Р 0,5 (97 ИЭ 41 ИЭ), λ= 632,8
фаски на углах 1+0,4х 45 ; Фаски на ребрах 0,3+0,4х 45
На поверхность А нанести копию решетки дифракционной прозрачной по РТМЗ – 260 – 72 с оригинала, имеющего следующие параметры
число штрихов на мм – 250
рабочая длина волны – 0,63 мкм
накопленная погрешность на 100 мм не более – 10 мкм
При контроле на установке ЦКДР–1 решетка дифракционная прозрачная в пределах рабочего поля (300 15), расположенного в соответствии с чертежом, должна обеспечивать следующие параметры фотоэлектрических сигналов
Изменение разности фаз квадратурных сигналов не более 11 эл градусов
Изменение постоянных составляющих квадратурных сигналов не более 15 от амплитуд сигналов
Изменение амплитуды не более 20 от среднего значения

Рис. 1.14. Система нанометрического смещения объекта
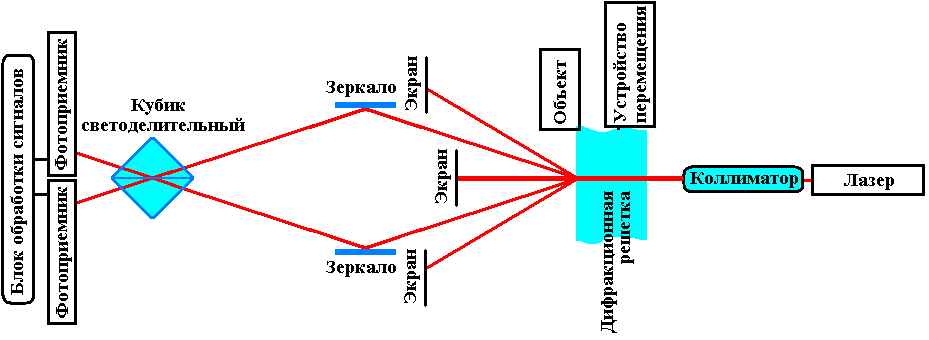
Рис. 1.15. Схема дифракционного датчика
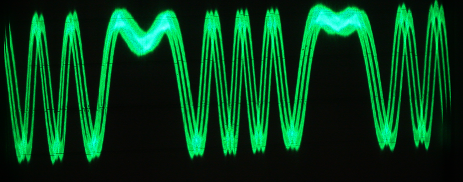
Рис. 1.16. Размах колебаний объекта примерно 9 мкм
Эскизный рисунок решетки приведен на рис. 1.13, ее параметры - ниже. Шаг решетки 4 мкм. Накопленная погрешность шага обычно компенсируется массивом корректировки, заносимым в память системы по аттестату изделия.
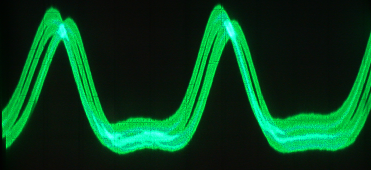
Рис. 1.17. Размах колебаний объекта примерно 2 мкм
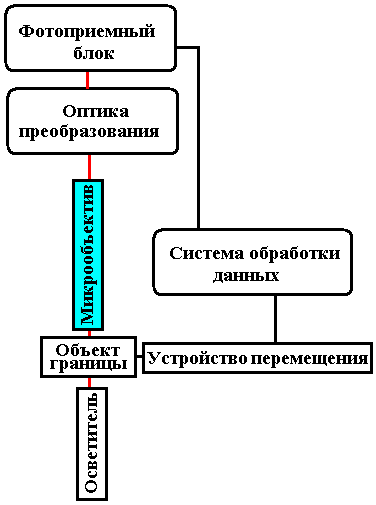
Рис. 1.18. Фотоэлектрический микроскоп
Дифракционная решетка с объектом крепятся на линейном пьезодвигателе рис. 1.14. Крутизна характеристики преобразования двигателя примерно 70 нм на вольт. Двигатель имеет и встроенный пьезоэлектрический датчик, показывающий величину смещения. Двигатель и датчик подключены к осциллографам. Для калибровки пьезоэлектрического датчика используется дифракционный оптический датчик, схема представлена на рис. 1.15.
Как видно из рисунка, датчик работает на пропускание и использует первые порядки дифракции. “Изображение” решетки строится в плоскостях фотоприемников по голографической схеме. Смещение решетки на шаг приводит к изменению разности фаз интерферирующих сигналов на 4π.
Множественность копий сигналов на фотографиях вызвано слабой синхронизацией и захватом во время накопления нескольких кадров развертки.
Подавая на двигатель гармонический сигнал, изменением частоты, рекомендуется достичь резонанса. Частоту установить небольшой так, чтобы постоянная времени схемы фотоприемник - входной усилитель осциллографа не влияла на сигнал. На рис.1.16. и рис. 1.17. приведены осциллограммы для двух амплитуд входного сигнала.
Чаще всего системы линейного перемещения входят в состав более сложных систем, например фотоэлектрических микроскопов.
Cхемы фотоэлектрических микроскопов приведены на рис.1.18 и рис.1.19.
Немало в цехах современных предприятий и визуальных микроскопов. Оператор в этом случае наводится на границу измеряемого элемента и по расстоянию между границами определяет размер элемента. В фотоэлектрическом микроскопе импульсы прохождения границ измеряемого объекта линии измерения (часто оптическая ось микроскопа) вырабатывают электронные схемы. Определение положения импульса на оси координат (сигналы с датчика линейных перемещений) проводится с использованием оптимальных методов цифровой обработки сигналов, снижающих влияние помех и повышающих разрешение прибора (обычно рассчитывается положение оси энергетической симметрии импульса или положение максимума корреляционной функции при априорно известной форме импульса).
Приведенная на рис.1.19 схема включает призму двойного изображения. Встречное движение изображений границ объектов обеспечивает снижение влияния подсветки, аберраций. Встречное движение изображений границ объектов обеспечивает снижение влияния подсветки, аберраций оптики. На схеме указан минимальный набор элементов. В качестве фотоприемного устройства может использоваться одиночный фотодиод, матричный или линейный многоэлементный фотоприемник.
Растровые датчики дают сведения о величине перемещения объекта или контактных устройств. Простейшие измерители (например, штангенциркули) практически не имеют дополнительных электронных блоков. Размер объекта определяется по разности показаний с датчика при наличии в измерительной цепи объекта и без него. Контактное усилие, как правило, тарируется. Его величина может составлять десятые доли грамма. Однако и в этом случае необходимо учитывать деформацию объекта.
Контактные приборы имеют свои преимущества и недостатки. Наиболее существенным недостатком является потенциальная возможность повреждения объекта, что во многих случаях недопустимо.
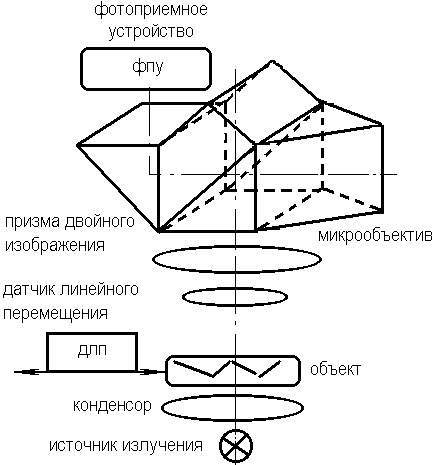
Рис. 1.19. Фотоэлектрический микроскоп с призмой двойного изображения
На СМП инструментальный микроскоп не оснащен фотоприемным блоком и системой обработки данных. Однако суть числоимпульсного метода измерения размеров, заключающегося в подсчете числа импульсов с датчика перемещения между соседними импульсами фиксации моментов прохождения импульсов от границ измеряемого элемента понятен.
Линейные измерения – одна из древнейших областей метрологии. В этой области создана хорошо осмысленная методология оценки погрешностей измерения. Однако повышение разрешающей способности измерителей, уменьшение размера элемента, применение сложных алгоритмов оценки положения фронтов и срезов сигналов существенно усложняют задачу определения метрологических характеристик.
В практике применения средств измерения широко используется усреднение результатов. Среднее арифметическое результатов наблюдений и случайное отклонение оцениваются по формулам (ГОСТ 11.004-74):
 ;
;
![]() .
.
Эти
оценки носят названия точечных. Наряду
с ними существуют интервальные оценки,
связанные с определением доверительных
границ случайной погрешности. Доверительные
границы случайной погрешности зависят
от заданной вероятности попадания в
интервал (ГОСТ 8.207-76). Учитывается также
и число измерений. При малом числе
измерений
![]() определяется с существенной погрешностью.
В этом случае увеличивают размер
доверительного интервала:
определяется с существенной погрешностью.
В этом случае увеличивают размер
доверительного интервала:
![]() ,
,
где t (P, n) – коэффициент Стьюдента (при
n = 8, p = 0,95, t = 2,306;
n = 10, p = 0,95, t = 2,228;
n = , p = 0,95, t = 1,96;
n = 8, p = 0,99, t = 3,355;
n = 10, p = 0,99, t = 3,169;
n = , p = 0,99, t = 2,576).
Измерения,
погрешность которых выходит за пределы
![]() ,
могут быть исключены из расчетов (грубые
погрешности).
,
могут быть исключены из расчетов (грубые
погрешности).
Наряду со случайными составляющими погрешности в измерениях присутствуют систематические погрешности, обусловленные погрешностями метода и аппаратуры (например, не идеальностью контактных площадок при контактных измерениях).
Предел основной погрешности измерительного прибора определяется по формуле
![]() ,
,
где
![]() – систематическая составляющая
погрешности;
– систематическая составляющая
погрешности;
![]() –
известное
значение измеряемой величины.
–
известное
значение измеряемой величины.
Лабораторное задание:
Изучить материалы к лабораторной работе и стенды, усвоив принципы формирования изображений в датчиках стендов, в том числе и в ультразвуковом диапазоне длин акустических волн.
На стенде микронных портретов:
Вращая шкалу муарового сопряжения, определить зависимость шага муаровой картины от угла поворота (6...8 точек). Рассчитать число усредняемых фотоприемником периодов шкалы, считая форму фотоприемной площадки квадратной и равной половине шага муаровой картины, построить график его зависимости от угла разворота сопряжения.
Рассчитать требуемые коэффициенты суммирования сигналов для заданного преподавателем значения коэффициента интерполяции.
Задавая направление движения и ток ЛД, зарисовать осциллограммы сигналов фотоприемников измерительной системы, определить значения амплитуд. Переключить развертку осциллографа на внешний сигнал. По форме фигур Лиссажу оценить фазовый сдвиг между сигналами, зарисовать их.
Измерить фрагмент топологии интегральной схемы (8, 10 измерений), согласовав его с преподавателем. Вычислить предел основной погрешности измерения и его составляющие.
Измерить контактным способом размер объекта при разных усилиях прижима с усреднением.
На стенде нанометровых смещений:
Включить осциллографы, усилитель, лазер и генератор сигналов, убедиться в их правильной работе.
Зарисовать ход лучей оптического датчика.
Задавая частоту колебаний выйти по пьезоэлектрическому датчику на низкочастотный резонанс. Оценить значение частоты и размах колебаний объекта.
Калибровать пьезоэлектрический датчик по чувствительности, используя осциллограммы дифракционного датчика.
Содержание отчета:
Общая часть должна включать цель работы и сведения о индивидуальном задании.
График зависимости числа усредненных периодов шкалы от угла разворота муарового сопряжения.
Осциллограммы сигналов и величину оценку фазового сдвига по фигуре Лиссажу.
Результаты измерения размеров с описанием фрагмента топологии.
Ход лучей в дифракционном датчике. Его чувствительность к величине смещения шкалы.
Осциллограммы и оценку размахов колебаний объекта для двух значений амплитуд сигнала на двигатель, вычисляя интегральную крутизну преобразования системы смещения.
Коэффициент калибровки пьезодатчика.
Выводы и замечания по работе.