

.1.СТРУКТУРНИЙ АНАЛІЗ КОНВЕЙЄРА
Механізм конвеєра (рис. 1.1) має в своєму складі рухомі ланки 1,2,3,4,5 і одну нерухому- стояк 6, він відноситься до стержньових, або важільних механізмів.
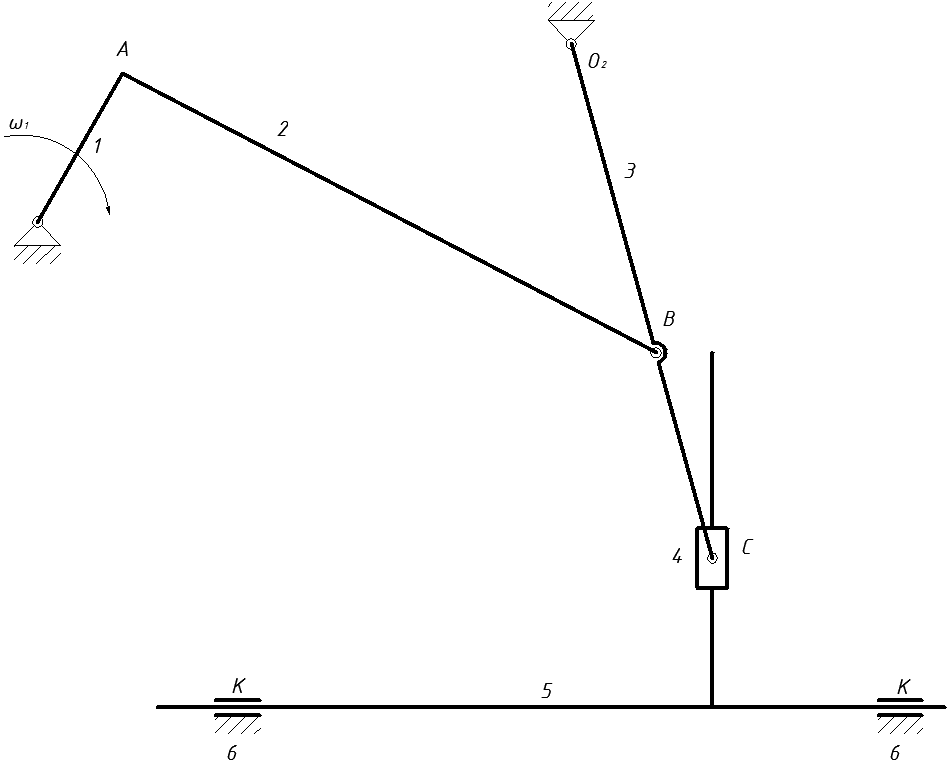
Рис. 1.1. Схема механізму конвеєра
Результати аналізу кінематичного ланцюга механізму конвеєра наведені в наступній таблиці:
Характеристики ланок і кінематичних пар механізму конвеєра
Ланки механізму |
Кінематичні пари |
|||||
Позн.
|
Назва |
Характер руху |
Позн. |
Назва |
Ланки, що створ.КП |
Клас КП |
1 |
Кривошип |
Обертальний |
О1 |
Оберт,нижча |
1,6 |
v |
2 |
Шатун |
Плоскопарал. |
А |
Оберт,нижча |
1,2 |
v |
3 |
Коромисло |
Коливальний |
В |
Оберт,нижча |
2,3 |
v |
4 |
Повзун |
Плоскопарал. |
О2 |
Оберт,нижча |
3,6 |
v |
5 |
Повзун |
Поступальний |
С |
Поступ,нижча |
4,5 |
v |
6 |
Стояк |
-------------- |
С |
Поступ,нижча |
3,7 |
v |
|
|
|
К |
|
5,6 |
v |
Cтепінь рухомості механізму конвеєра визначимо за формулою Чебишева
 ,
,
де: n=5- кількість рухомих ланок механізму;
p5=7- кількість кінематичних пар 5 класу;
У складі механізму конвеєра маємо одну вхідну ланку- кривошип О1 А- і дві групи Ассура. Спочатку виділимо групу №1, що складена із ланок 4,5 (рис.1.2, а), а потім групу №2 у складі ланок 2,3 (рис.1.2, б). Вхідна ланка 1разом із стояком 6 створює механізм 1 класу (рис.1.2, в).
Кожна ланка в обох групах Ассура входить в дві кінематичні пари, тому всі ланки являють собою контури 2 класу і обидві групи Ассура, а також механізм конвеєра в цілому – 2-ог класу.
Формула будови механізму конвеєра має вигляд:
I(1,6)← II (2,3)← II(4,5)
Обидві групи Ассура являють собою групи другого порядку, оскільки з’єднуються з вихідним механізмом в двох точках: А, О2 і С,К (див.рис.1.1)
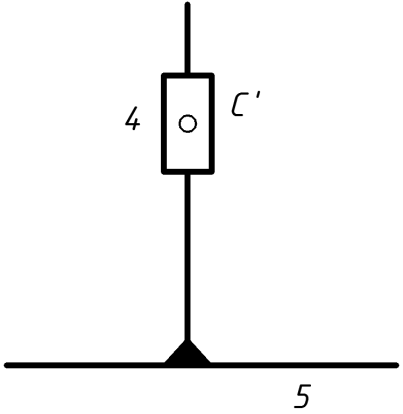
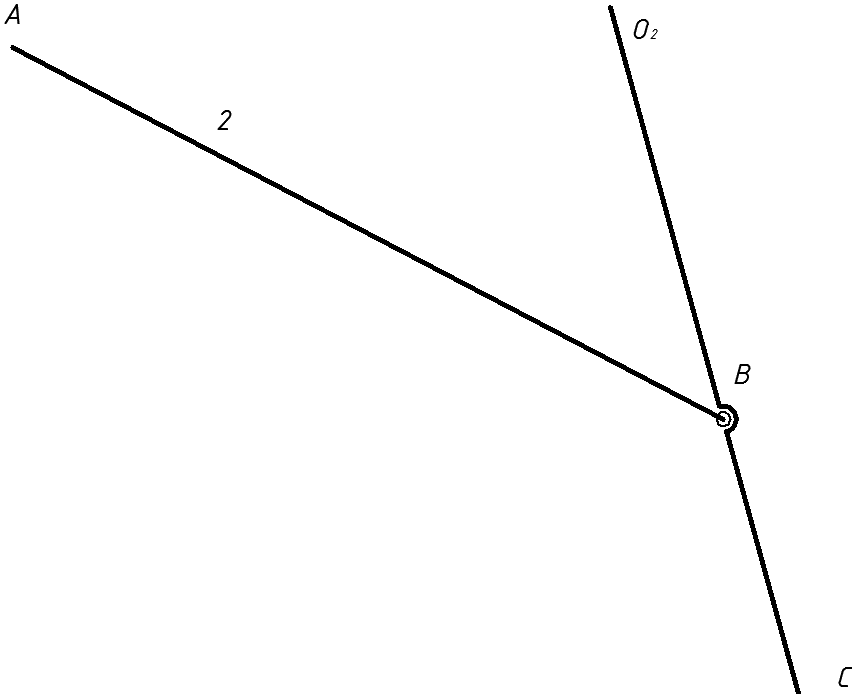
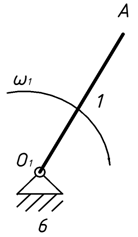
Група Ассура №1 Група Ассура №2 Механізм I класу
Клас II ланки 4,5 Клас II ланки 2,3 ланки 1,6
А) Б) В)
Рис. 1.2 Структурні складові механізму конвеєра
2. Синтез кінематичної схеми механізму конвейєра
В основі досліджуваного механізму конвеєра лежить механізм шарнірного чотириланковика (рис.2.1), то ж метою синтезу безпосередньо його кінетичної схеми за величиною коефіцієнта зміни середньої швидкості вихідної ланки к=1,2 є визначення довжин кривошипа 1 і шатуна 2.
Для однозначного розв’язання згаданої задачі потрібні наступні дані:
кути
 і
і
 ,
що визначають крайні положення коромисла
3 в його зворотно-обертальному русі;
,
що визначають крайні положення коромисла
3 в його зворотно-обертальному русі;
 мм – повна довжина
коромисла 3 і абсциса центра
мм – повна довжина
коромисла 3 і абсциса центра
 його повороту відносно осі
його повороту відносно осі
 обертання кривошипа 1 відповідно;
обертання кривошипа 1 відповідно;
 - розрахована
довжина коромисла 3 (довжина його ділянки
- розрахована
довжина коромисла 3 (довжина його ділянки
 );
);
 - співвідношення
довжин ділянок
і
- співвідношення
довжин ділянок
і
 коромисла 3.
коромисла 3.
За наявності наведених вихідних даних в першу чергу визначимо кут перекриття
 ,
,
тобто кут між
напрямами
 і
і
 ,
які створюються кривошипом 1 і шатуном
2 в їх двох крайніх положеннях.
,
які створюються кривошипом 1 і шатуном
2 в їх двох крайніх положеннях.
Постійність значень
θ і К можна забезпечити, якщо центр
обертання кривошипа 1 розміщувати в
будь-якій точці кола L,
відносно якого пряма
 є хордою, на неї спирається вписаний в
загальне коло кут θ. Центр
є хордою, на неї спирається вписаний в
загальне коло кут θ. Центр
 кола L
розташований на відрізку В’
,
він є перпендикуляром до хорди
і проходить через її середню точку В’.
Радіус кола L
становить
кола L
розташований на відрізку В’
,
він є перпендикуляром до хорди
і проходить через її середню точку В’.
Радіус кола L
становить

тут слід нагадати,
що вписаному в коло L
куту θ відповідає центральний кут
 .
.
Якщо положення осі обертання кривошипа 1 зафіксувати відносно центра розміром

то із
 і
і
 слід, по-перше
слід, по-перше
 , (1)
, (1)

а по-друге
 , (2)
, (2)
 .
.
На підставі системи рівнянь (1) маємо
 ,
,
звідси слід
і далі
 . (3)
. (3)
Для визначення довжини відрізків і за допомогою системи рівнянь (2) послідовно знайдемо
 ;
;
 ;
;
 ;
;

 ;
;
 .
.
Тепер визначимо

 ;
;
 .
.
На підставі рівняння (3) отримаємо довжини кривошипа 1 і шатуна 2 відповідно
 ;
;
 .
.
Для подальших розрахунків приймаємо
 .
.
Зрозуміло, що зображення кінематичної схеми механізму конвеєра за зразком рис. 1 на першому листі графічної частини курсового проекту можна виконувати лише після визначення довжини кривошипа 1 і шатуна 2. Схему механізму слід виконувати з використанням лінійного маcштабу

в трьох положеннях, які визначаються наступними індексами:
0 – початкове
положення з кутом установки
 кривошипа 1, що
кривошипа 1, що
відповідає початку прямого (робочого) ходу повзуна 5;
1 – досліджуване
розгорнуте положення механізму з кутом
установки кривошипа
 ;
;
2 – друге
крайнє положення механізму, що відповідає
закінченню прямого ходу повзуна 5 і куту
 установки 1.
установки 1.
Видно, що наведені
індекси являють собою другу цифру у
складі індексу кута
 установки кривошипа 1. Розгорнуте
положення механізму слід виконати з
урахуванням кута
,
який призначається керівником курсового
проектування.
установки кривошипа 1. Розгорнуте
положення механізму слід виконати з
урахуванням кута
,
який призначається керівником курсового
проектування.
За наявності зазначеного креслення довжини кривошипа 1 і шатуна 2 можна визначити графічним шляхом, з цією метою перше рівняння системи (3) представимо у формі
 (4)
(4)
після чого на
кресленні кінематичної схеми механізму
за допомогою дуги кола із центром в
точці
перенесемо точку
 на відрізок прямої
,
тобто побудуємо різницю
на відрізок прямої
,
тобто побудуємо різницю

або праву частину
рівняння (4). Після вимірювання відрізка
 на кресленні і поділу результату на
впіл визначимо дійсну довжину кривошипа
на кресленні і поділу результату на
впіл визначимо дійсну довжину кривошипа

тут - масштаб креслення.
Довжина шатуна

Результати визначення довжин кривошипа 1 і шатуна 2 двома методами слід порівняти між собою, тобто визначити відносні відхилення
 ,
,
 .
.
Положення осі
повороту коромисла 3 відносно осі
обертання кривошипа 1 слід визначити
координатами
 вони необхідні для обробки корпуса
механізму конвейєра на
горизонтально-розточувальному верстаті
і визначають собою міжосьову відстань
вони необхідні для обробки корпуса
механізму конвейєра на
горизонтально-розточувальному верстаті
і визначають собою міжосьову відстань
 .
Із
.
Із
 слід
слід



За результатами вимірювання на креслені

Відхилення від розрахункового значення
 .
.
Абсциса
 обрана раніше, ордината осі
відносно центра
обертання кривошипа
обрана раніше, ордината осі
відносно центра
обертання кривошипа
 ;
;
надалі приймаємо

За результатами вимірювання на кресленні

відхилення від розрахункового значення
 .
.
Конструктивний
розмір
 визначається за емпіричним співвідношенням
визначається за емпіричним співвідношенням
 ;
;
приймаємо
