

68. Частотная модуляция. Спектры чм–колебаний.
69. Какие виды модуляции гармонических колебаний можно обнаружить в радиокомпасе и каковы их спектры?
В приемник радиопеленгатора поступают две ЭДС: Ер — от рамки, Eа — от открытой антенны. Высокочастотные колебания, подводимые от рамки, меняют фазу с частотой 50 Гц (рис.8, а). Эти колебания складываются с колебаниями, поступающими от открытой антенны (рис.8, б), и на усилитель поступает суммированная ЭДС (рис.8, в). В первый полупериод низкой частоты 50 Гц сигнал высокой частоты рамки совпадает по фазе с сигналом высокой частоты открытой антенны, и поэтому результирующее напряжение будет равно сумме напряжений поступающих сигналов.
Во второй полупериод напряжение сигнала рамки находится в противофазе с напряжением открытой антенны и результирующее напряжение будет равно их разности. Далее суммарный сигнал усиливается и выпрямляется. Величина напряжения частотой 50 Гц на выходе приемника зависит от угла поворота рамки. Если плоскость рамки образует прямой угол с направлением на радиостанцию, рамка не принимает приходящие сигналы, следовательно, нет модуляции сигнала антенны, а на выходе приемника не будет напряжения частоты 50 Гц.
При переключении фазы образуется другая кардиоида, которая является как бы зеркальным отображением первой. Эти две кардиоиды и определяют направление сигнала на выходе пеленгатора. Одна из кардиоид — отрицательная, другая — положительная. Если преобладает ЭДС с отрицательным знаком, сигнал на выходе будет одного направления; при положительном знаке сигнал имеет другое направление.
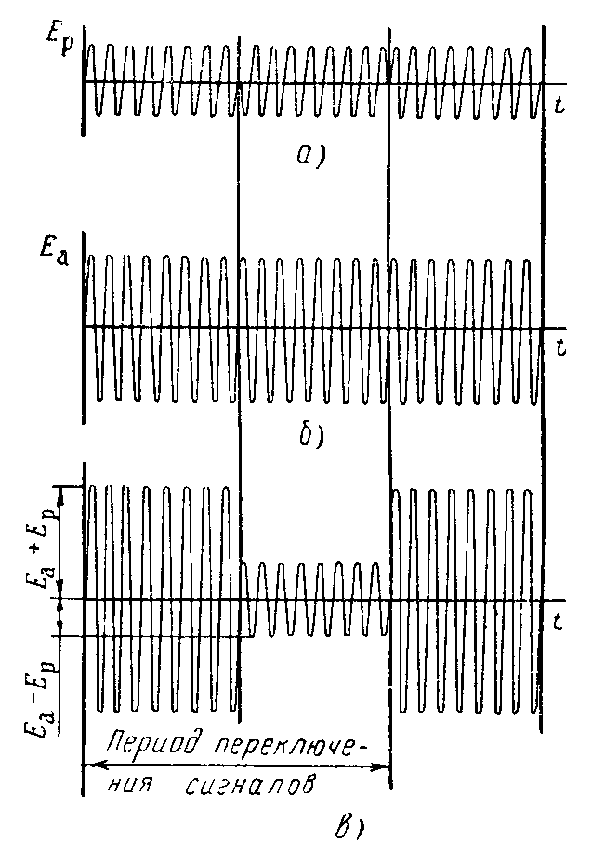
Рис.8. Сложение колебаний рамки и открытой антенны в радиопеленгаторе после коммутации
Таким образом, в радиокомпасе можно наблюдать следующие виды модуляции: амплитудная и фазовая модуляция.
Наличие амплитудной модуляции указывает на то, что направление приходящего сигнала не совпадает с направлением нулевого приема рамочной антенны. Фаза модуляции определяется фазой рамочного сигнала по высокой частоте и указывает сторону отклонения приходящего сигнала относительно направления пеленга.
Спектры АМ и ФМ колебаний показаны на рис.2.27 и рис. 2.29.

Рис. 2.27. Спектр ФМ-сигнала
Рис. 2.29. Спектр сигнала при амплитудно-импульсной модуляции
70. Модуляция гармонических колебаний. Виды амплитудной модуляции и как они представлены в арк?
АРК – это амплитудные РНУ использующие метод минимума глубины ампл модуляции по схеме это замкнутые системы автоматического регулирования. Для формирования сигнала несущего информацию в АРК используют антенную систему, которая в простом случае состоит из одной подвижно – направленной(магнитная антенна) и ненаправленной антенны. Магнитные антенны могут быть без конденсаторов МП.
Структурная схема АРК
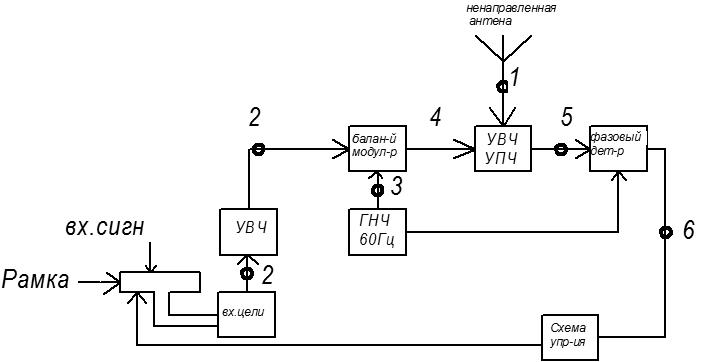
Рис 1. Структурная схема АРК

Модулированные колебания и их спектры
Под модуляцией понимается процесс, при котором один или несколько параметров несущего колебания изменяется по закону передаваемого сообщения. Получаемые в процессе модуляции колебания называют радиосигналами. В аналоговых системах связи радиосигналы передаются непрерывно во времени, и при модуляции могут изменяться амплитуда, частота или фаза несущего гармонического колебания. В зависимости от того, какой из названных параметров несущего гармонического колебания подвергается изменению, различают два основных вида аналоговой модуляции: амплитудную и угловую. Последний вид модуляции, в свою очередь, разделяется на частотную и фазовую.
Радиосигналы с амплитудной модуляцией. В процессе осуществления амплитудной модуляции несущего колебания
![]() (2.54)
его амплитуда
(2.54)
его амплитуда
должна изменяться по закону:
![]() (2.55)
(2.55)
где
Uи
— амплитуда
в отсутствие модуляции;
![]() —
угловая (круговая) частота;
—
угловая (круговая) частота;![]() —
начальная фаза;
—
начальная фаза;![]() —
полная (текущая или мгновенная)
фаза;
—
полная (текущая или мгновенная)
фаза;![]() —
безразмерный коэффициент пропорциональности;
—
безразмерный коэффициент пропорциональности;
![]() —
модулирующий сигнал.
—
модулирующий сигнал.
Подставив формулу (2.55) в (2.54), получим общее выражение для АМ-сигнала
![]() (2.56)
(2.56)
Обратимся к простейшему виду амплитудной модуляции — однотональной (от слова тон — звук одной частоты), когда модулирующий сигнал представляет собой гармоническое колебание
![]() (2.57)
(2.57)
где![]() —
амплитуда;
—
амплитуда;![]() —
круговая частота; Тх — период; —
начальная фаза.
—
круговая частота; Тх — период; —
начальная фаза.![]()
Для
упрощения выкладок примем начальные
фазы несущего колебания и модулирующего
сигнала![]() и
и![]() Тогда,
подставив формулу (2.57) в (2.56), получим
выражение для АМ-сигнала
Тогда,
подставив формулу (2.57) в (2.56), получим
выражение для АМ-сигнала
![]() (2.58)
(2.58)
Обозначив
через![]() максимальное
отклонение амплитуды АМ-сигнала от
амплитуды несущей £/„ и проведя несложные
преобразования, запишем
максимальное
отклонение амплитуды АМ-сигнала от
амплитуды несущей £/„ и проведя несложные
преобразования, запишем
![]() (2.59)
(2.59)
![]()
Из соотношения (2.64) видно, что в спектре сложного АМ-сигнала, наряду с несущим колебанием, содержатся группы верхних и нижних боковых составляющих, являющихся масштабными копиями спектра модулирующего сигнала и расположенных симметрично относительно несущей частоты . Отсюда следует важный вывод: ширина спектра сложного АМ-сигнала равна удвоенному значению наивысшей частоты в спектре модулирующего сигнала ΩN.
Значительная доля мощности АМ-сигнала (не менее 50%) сосредоточена в несущем колебании, которое фактически не переносит никакой информации. Передаваемая же полезная информация (сообщение) заложена только в боковых составляющих радиосигнала, на долю которых приходится менее 50% мощности. Поэтому для более эффективного использования мощности передатчика радиотехнических систем передачи информации создают АМ-сигналы с подавленным несущим колебанием, реализуя так называемую балансную амплитудную модуляцию (БМ). Выражение для радиосигнала с балансной амплитудной модуляцией нетрудно получить из (2.60), она имеет следующий вид:
![]() (2.65)
(2.65)
В современных системах связи часто приходится экономить не только мощность, но и полосу занимаемых частот. С этой целью формируют АМ-сигналы с подавленной верхней (или нижней) боковой полосой частот, получая колебание с одной боковой полосой (ОБП)
![]() (2.66)
(2.66)
Другой, еще более эффективной с точки зрения энергетических показателей, разновидностью АМ-сигналов является однополосная амплитудная модуляция с подавленной несущей (ОБП-ПН):
![]()
Данный вид амплитудной модуляции представляет собой такое преобразование несущего колебания, при котором спектр радиосигнала полностью совпадает со спектром сообщения, перенесенным по оси частот в высокочастотную область нижней или верхней боковой полосы.