

3.3 Пример решения задачи с1
Задание. Конструкция состоит из невесомых стержней 1, 2, …6, соединенных друг с другом (в узлах K и М) и с неподвижными опорами A, B, C, D шарнирами (рис. 3.7). В узлах K и М приложены силы P и Q, образующие с координатными осями углы α1, β1, γ1 и α2, β2, γ2 соответственно.
Рисунок 3.7 |
Дано: P=100Н, α1=60º, β1=60º, γ1=45º, Q=50Н , α2=45°, β2=60º, γ2=60º, ψ=30º, φ=60º, δ=74º.
Определить усилия в стержнях 1-6.
|

Решение.
Разложим силы P и Q на составляющие (проекции сил на оси). Так как сила P составляет с координатными осями углы (рис.3.8), то:
|
Аналогично для силы Q:
|
 Рисунок
3.8
Рисунок
3.8

Концы стержней соединены между собой и опорами с помощью шарниров. Силы так же приложены только в узлах (шарнирах). При такой конструкции внутренние усилия, возникающие в стержнях, направлены только вдоль стержней, а они (стержни) подвержены растяжению или сжатию.
Рассмотрим равновесие узла K, в котором сходятся стержни 1, 2, 3. На узел действуют сил P и реакции N1, N2, N3 стержней, которые направим по стержням от узла, предварительно считая стержни растянутыми (рис.3.9).
Рисунок 3.9 |
Рисунок 3.10 |


Из рисунка 3.9 видно, что сила N1 проецируется только на ось y’, сила N2 на ось x’ и ось y’, а N3 на оси x’ и z’. Так как x’, y’, z’ параллельны соответствующим осям x, y, z, то и проекции сил на оси будут равны.
Полученная система сил P, N1, N2, N3 является сходящейся системой сил, поэтому воспользуемся выражениями (3.6) и составим уравнения равновесия.
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
Вначале определим значение N3 из (3):
![]()
Подставив значение N3 в уравнение (1) найдем N2:
![]()
И, наконец, определим N1:
![]()
Рассмотрим равновесие узла М (рис.3.10). На узел действует сила Q и реакции N2’, N4, N5, N6. При этом по закону о равенстве действия и противодействия реакция N2’ направлена противоположно N2, числено же N2’=N2.
Из рисунка 3.10 видно, что сила N4 проецируется только на ось x”, сила N6 только на ось z”, а сила N5 на все оси. Причем, чтобы найти проекцию N5 на ось x” или ось y” вначале необходимо спроецировать силу на плоскость x”y” (или параллельно ей) – получим N5sin(δ), и лишь затем проецировать N5sin(δ) на соответствующие оси.
Система сил Q, N2’, N4, N5, N6 также является системой сходящихся сил. Составляем уравнения равновесия.
![]() (4)
(4)
![]() (5)
(5)
![]() (6)
(6)
Находим последовательно значения N5, N6, N4.
Из (5)
![]()
Из (6)
![]()
Из (4)
![]()
Ответ: N1=348,7H; N2=–344,9H; N3=141,4H; N4=50,3; N5=328,8H; N6=–65,6H. Знак “–” показывает, что силы направлены в обратную сторону от принятого перед решением задачи. Соответственно стержни 2 и 6 сжаты.
4 Момент
4.1 Момент силы относительно центра
Под действием силы тело может совершать не только поступательное движение, но и вращательное. Рассмотрим два примера действия некоторой силы на тело.

Рисунок 3.1
Случай 1. Сила F приложена к центру тяжести или линия ее действия пересекает центр тяжести тела (Ц.Т.). В этом случае тело будет двигаться только поступательно (прямолинейно) (рис.4.1а).
Случай 2. Линия действия силы смещена от центра тяжести на некоторое расстояние (рис.4.1б). В результате тело будет не только перемещаться в пространстве, но и вращаться вокруг Ц.Т. Вращение будет тем сильнее, чем больше расстояние между линией действия силы F и центром. И наоборот.
Вращательный эффект силы относительно цента характеризуется моментом силы. Момент силы относительно центра является величиной векторной. Модуль момента силы относительно центра определяется произведением модуля силы F на плечо h взятым со знаком “+” или “–”:
![]() (4.1)
(4.1)
Соответственно размерность момента в системе СИ [Н*м].
Плечо h является наименьшим расстоянием от центра до линии действия силы и определяется с помощью перпендикуляра, проведенного из центра к линии действия.
Знак момента принимается по следующему правилу: если сила стремиться повернуть тело относительно точки, для которой определяется момент силы, против часовой стрелки, то момент считается положительным (рис.4.2а); если наоборот, то отрицательным (рис.4.2б). Следует учесть, что моменты силы относительно различных центров может иметь не только различное значение и, но и знак (рис.4.2в).

Момент силы величина векторная. Вектор момента перпендикулярен плоскости действия момента – плоскости, в которой расположено плечо и вектор силы. Стрелка вектора направлена в сторону смотрящего, если момент стремится вращать против часовой стрелки, и наоборот, если момент стремится вращать по часовой стрелке (рис.4.3а), то вектор направлен от смотрящего (рис.4.3б).
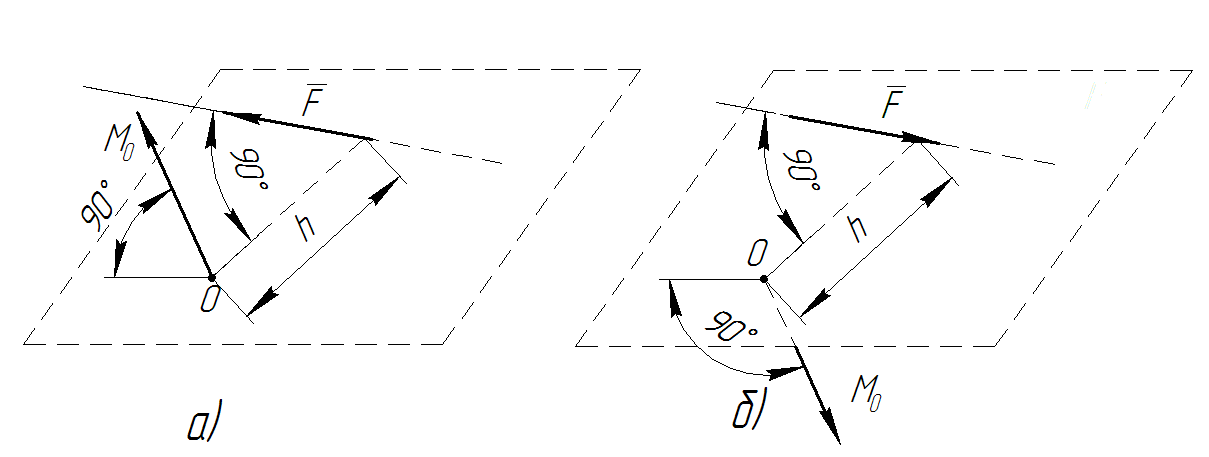
Рисунок 4.3
Вектор момента можно определить при векторном произведении:
![]() , (4.2)
, (4.2)
где r – радиус-вектор (вектор из центра О до точки приложения силы F).

Рисунок 4.4