

Вопросы для самопроверки
1. Чем обусловлена необходимость применения моделей и моделирования?
2. Дайте определение модели, моделирования и теории моделирования.
3. Какие из известных методов моделирования наиболее широко используются при моделировании электроприводов?
4. Какое моделирование называют физическим?
5. Какое моделирование называют натурным?
6. Какое моделирование называют математическим и что является результатом математического моделирования?
7. Что такое иммитационное моделирование?
8. Назовите пакеты программ, с помощью которых наиболее эффективно может быть осуществлено моделирование электроприводов.
Р А З Д Е Л X
МОДЕЛИРОВАНИЕ РАЗОМКНУТЫХ ЭЛЕКТРОПРИ-ВОДОВ С ТРЕХФАЗНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ
Математическая модель трехфазного асинхрон- ного двигателя с короткозамкнутым ротором в фазных осях
Виртуальная модель трехфазного асинхронного двигателя в MatLab 6.1
Результаты компьютерного моделирования пе- реходных и установившихся процессов в трех- фазном асинхронном двигателе с коротко- замкнутым ротором при питании от трех- фазного симметричного источника
Виртуальная модель трехфазного мостового автономного инвертора напряжения с широтно-импульсной модуляцией в MatLab 6.1
Результаты компьютерного моделирования переходных и установившихся процессов в трехфазном асинхронном двигателе с коротко- замкнутым ротором при питании от трех- фазного мостового автономного инвертора с широтно-импульсной модуляцией
1. Математическая модель трехфазного асинхронного двигателя с короткозамкнутым ротором в фазных осях
На рис. 66 показано
пространственное расположение обмоток
трехфазной идеализированной асинхронной
электрической машины. На статоре имеются
три обмотки с числом витков
![]() ,
на роторе - три обмотки с числом витков
,
на роторе - три обмотки с числом витков
![]() .
.
С осями обмоток совмещены координатные оси А, В, С статора и a, b, с ротора [7].

Рис. 66.
Здесь и далее
условимся, что индексы
![]() указывают на принадлежность параметра
соответствующей фазе статора; а индексы
указывают на принадлежность параметра
соответствующей фазе статора; а индексы
![]() - на принадлежность параметра фазе
ротора.
- на принадлежность параметра фазе
ротора.
Система координат
ротора перемещается относительно
системы координат статора, их взаимное
расположение характеризуется электрическим
углом
![]() между осями.
между осями.
Эти оси в теории электрических машин получили название естественных, или фазных, непреобразованных координат.
Исходная система дифференциальных уравнений трехфазного АД может быть записана в матричной форме на основании второго закона Кирхгофа с учетом уравнения Максвелла:
![]() ,
(10.1)
,
(10.1)
где
![]() - матрица напряжений;
- матрица напряжений;
![]() - матрица активных сопротивлений;
- матрица активных сопротивлений;
![]() - матрица токов;
- матрица токов;
![]() - матрица потокосцеплений;
- матрица потокосцеплений;
![]() - матрица индуктивностей.
- матрица индуктивностей.
Матрицы трехфазного АД, входящие в (10.1), имеют следующий вид:
![]() ;
(10.2)
;
(10.2)
![]() ;
(10.3)
;
(10.3)
![]() ;
(10.4)
;
(10.4)
 ;
(10.5)
;
(10.5)
 ,
(10.6)
,
(10.6)
где
![]() - знак транспонирования матрицы; М
- взаимная индуктивность между обмотками.
- знак транспонирования матрицы; М
- взаимная индуктивность между обмотками.
При записи системы дифференциальных уравнений трехфазного АД с короткозамкнутым ротором в фазных координатных осях вводим следующие допущения:
1) обмотка статора получает питание от источника напряжения бесконечной мощности, внутреннее сопротивление которого равно нулю;
2) магнитодвижущие силы (МДС) обмоток синусоидально распределены по окружности статора и ротора;
3) машина симметрична;
4) оси обмоток
сдвинуты на угол
![]() ;
;
5) воздушный зазор равномерный;
6) насыщение и потери в стали отсутствуют;
7) параметры обмотки ротора приведены к числу витков и количеству фаз статора.
Таким образом, в основу математической модели трехфазного АД положено не только пространственное расположение обмоток, но и параметры Т-образной схемы замещения фазы АД (рис. 67).
Далее, чтобы не перегружать уравнения множеством индексов, условимся значок приведения параметров « ¢ » не писать.
Обмотку статора подключаем к внешнему источнику, вырабатывающему синусоидальные напряжения
![]() (10.7)
(10.7)
Угловую частоту
![]() определяем по формуле
определяем по формуле
![]() ,
(10.8)
,
(10.8)
где
![]() - частота напряжения статора.
- частота напряжения статора.
При короткозамкнутом роторе
![]() .
(10.9)
.
(10.9)
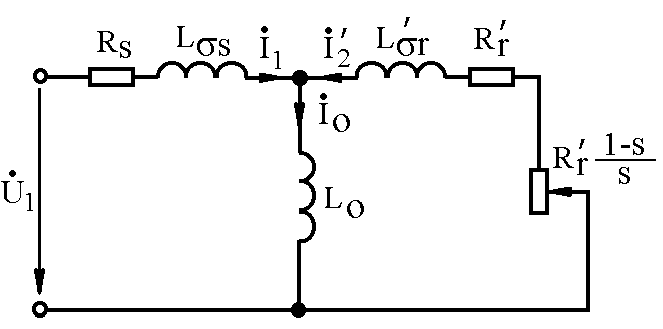
Рис. 67.
На
рис. 67:![]() - активное сопротивление обмотки статора;
- активное сопротивление обмотки статора;
![]() - индуктивность первичной обмотки от
потока рассеяния
- индуктивность первичной обмотки от
потока рассеяния
![]() ;
;
![]() - индуктивность намагничивающего
контура;
- индуктивность намагничивающего
контура;
![]() - приведенное к статору активное
сопротивление обмотки ротора;
- приведенное к статору активное
сопротивление обмотки ротора;
![]() - приведенная к статору индуктивность
обмотки ротора от потока рассеяния
- приведенная к статору индуктивность
обмотки ротора от потока рассеяния
![]() ;
;
![]() - сопротивление, учитывающее нагрузку
на валу; s
– скольжение.
- сопротивление, учитывающее нагрузку
на валу; s
– скольжение.
В соответствии с пространственным расположением фаз, указанным на рис. 66, магнитное поле статора будет вращаться против часовой стрелки. В этом же направлении с частотой вращения будет вращаться ротор.
Поскольку обмотки статора и ротора симметричны, то для их активных сопротивлений и индуктивностей можно записать [8]:
![]() ;
(10.10)
;
(10.10)
![]() ;
(10.11)
;
(10.11)
![]() ;
(10.12)
;
(10.12)
![]() .
(10.13)
.
(10.13)
Так как нами было введено допущение о равномерности воздушного зазора, то все собственные индуктивности не зависят от углового положения ротора:
![]() ;
(10.14)
;
(10.14)
![]() ,
(10.15)
,
(10.15)
где
![]() - индуктивность от потока рассеяния;
- индуктивность от основного потока.
- индуктивность от потока рассеяния;
- индуктивность от основного потока.
Рис. 68. Взаимно перемещающиеся катушки |
Прежде чем
записать выражения взаимных
индуктивностей обмоток, рассмотрим
две взаимоперемещающиеся катушки с
током (рис. 68). Первая катушка неподвижна,
а вторая поворачивается относительно
первой на некоторый геометрический
угол
|

Если вторая катушка вращается относительно первой, то взаимная индуктивность изменяется по закону
![]() (10.16)
(10.16)
и
достигает максимума
![]() при совпадении осей обмоток.
при совпадении осей обмоток.
Таким образом, известная из курса электродинамики формула для электромагнитного момента, создаваемого этими катушками, имеет вид
![]() , (10.17)
, (10.17)
где М – взаимная индуктивность.
Взаимное расположение обмоток в электрических машинах переменного тока, как правило, характеризуется электрическим углом:
![]() ,
(10.18)
,
(10.18)
тогда (10.17) будет иметь вид
![]() , (10.19)
, (10.19)
где
![]() - число пар полюсов.
- число пар полюсов.
Вернемся к обмоткам рассматриваемого двигателя.
Трехфазные обмотки
статора и ротора смещены в пространстве
на угол
![]() ,
поэтому
,
поэтому
![]() ;
(10.20)
;
(10.20)
![]() .
(10.21)
.
(10.21)
Взаимные индуктивности
между обмотками статора и ротора являются
функциями угла поворота ротора
![]() и поэтому являются также функциями
времени. Очевидно, что период их изменения
равен одному обороту ротора.
и поэтому являются также функциями
времени. Очевидно, что период их изменения
равен одному обороту ротора.
Согласно рис. 66 можно записать:
![]() ; (10.22)
; (10.22)
![]() ; (10.23)
; (10.23)
![]() ;
(10.24)
;
(10.24)
![]()
![]() ; (10.25)
; (10.25)
![]() ;
(10.26)
;
(10.26)
![]()
![]() . (10.27)
. (10.27)
Величина
в (10.20)-(10.27) представляет собой максимальное
значение взаимной индуктивности и для
приведенного АД совпадает по величине
с индуктивностью
![]() от основного магнитного потока в (10.14),
(10.15).
от основного магнитного потока в (10.14),
(10.15).
Геометрический угол поворота ротора определяют из уравнения
![]() ,
(10.28)
,
(10.28)
где - частота вращения ротора.
Подставив (10.20)-(10.27) в (10.6), получим матрицу индуктивностей , которая записана на с.187.
Матрицу
![]() запишем следующим образом:
запишем следующим образом:
![]() .
(10.29)
.
(10.29)
Частная производная по углу поворота ротора от пятого элемента первой строки матрицы имеет вид

![]() .
(10.30)
.
(10.30)

![]()

Аналогично
выполняется дифференцирование остальных
элементов матрицы
.
Матрица
![]() записана на с. 187.
записана на с. 187.
Таким образом, все матрицы, входящие в систему (10.1), определены.
Дополнив систему (10.1) выражением электромагнитного момента, уравнением движения и уравнением (11.28), получим математическую модель трехфазного АД с короткозамкнутым ротором в фазных осях.
Электромагнитный
момент определяем через электромагнитную
энергию
![]() ,
сконцентрированную в воздушном зазоре
АД [24]:
,
сконцентрированную в воздушном зазоре
АД [24]:
![]() .
(10.31)
.
(10.31)
Перемножив матрицы в (11.31), получим аналитическое выражение электромагнитного момента трехфазного АД:
![]()
EMBED
Equation.3
![]() (10.32)
(10.32)
Согласно рекомендациям [12] при моделировании АД в уравнение движения необходимо ввести составляющую, которая учитывает момент трения (механические потери):
![]() , (10.33)
, (10.33)
где
![]() - номинальная частота вращения;
- номинальная частота вращения;
![]() - номинальный момент.
- номинальный момент.
Наличие коэффициента 0,01 в формуле (10.33) оправдано для АД средней и большой мощности. Более значительная доля момента трения возникает в АД малой мощности [12].
Таким образом, система (10.1), уравнение движения (10.33), уравнение (10.28), а также уравнение электромагнитного момента (10.32) представляют собой математическую модель трехфазного АД с короткозамкнутым ротором.
Чтобы проинтегрировать систему (10.1) и уравнения (10.33), (10.28) с учетом (10.32), необходимо задать:
1) все параметры двигателя;
2) законы изменения
напряжений
![]() ,
,
![]() ,
,
![]() и статического момента
и статического момента
![]() ;
;
3) начальные условия
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ;
;
4) шаг интегрирования и конечное время.
В результате
получим
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Частота вращения
ротора
![]() и скорость n
связаны следующим соотношением:
и скорость n
связаны следующим соотношением:
![]() ,
об./мин. (10.34)
,
об./мин. (10.34)