

Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
Пермский государственный технический университет
Кафедра "Конструирование машин и сопротивление материалов"
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту по ТММ
Задание № 71 Вариант № 5 _
Студент гр. _______
___________
Руководитель проекта
Кобитянский А. Е.
Пермь 2010 г.
Кинематическое исследование механизма
Структурный анализ механизма

Степень подвижности определяем по формуле П. Л. Чебышева, так как механизм плоский:

где
 – число подвижных звеньев
кинематической цепи,
– число подвижных звеньев
кинематической цепи,
 - число кинематических пар V
класса,
- число кинематических пар V
класса,
 – число кинематических пар IV
класса
– число кинематических пар IV
класса
Определяем степень подвижности данного механизма:

Разбиваем механизм на группы Ассура:



Формула
структурного строения механизма
 Механизм второго класса.
Механизм второго класса.
Графическое исследование механизма
Для построений положений механизма необходимо выбрать масштабный коэффициент.

Определяем длины звеньев, соответствующих выбранному масштабу:





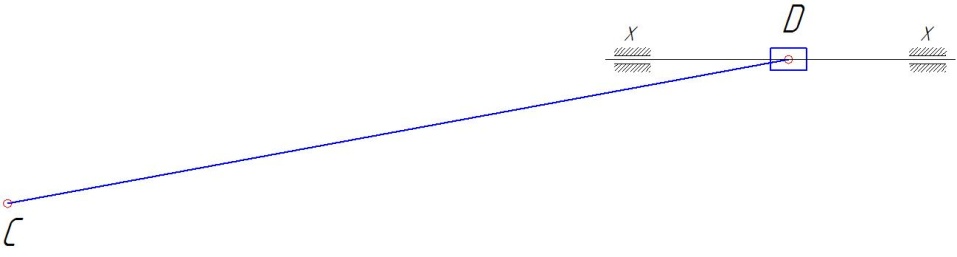
Построение крайних положений механизма
Крайние положения механизма соответствуют
такие положения коромысла CD
и шатуна
 при которых они выпрямляются в одну
линию. От нулевого положения против
часовой стрелки радиусом AB
откладываем по
при которых они выпрямляются в одну
линию. От нулевого положения против
часовой стрелки радиусом AB
откладываем по
 .
Получилось 12 положений механизма.
Измеряя отрезки
.
Получилось 12 положений механизма.
Измеряя отрезки
 ,
,
 и так далее можно определить перемещение
точки E, а следовательно
и рабочего органа механизма, при разных
углах поворота кривошипа AB.
Для построения графика перемещения и
пути точки E, на оси абсцисс
выбираем отрезок длиной x
= 240 мм, соответствующий углу 2π радиан
или периоду (T, сек) одного
оборота кривошипа. Вычисляем масштабный
коэффициент угла поворота:
и так далее можно определить перемещение
точки E, а следовательно
и рабочего органа механизма, при разных
углах поворота кривошипа AB.
Для построения графика перемещения и
пути точки E, на оси абсцисс
выбираем отрезок длиной x
= 240 мм, соответствующий углу 2π радиан
или периоду (T, сек) одного
оборота кривошипа. Вычисляем масштабный
коэффициент угла поворота:

 – угловая скорость кривошипа находится
по формуле:
– угловая скорость кривошипа находится
по формуле:

где
n
число оборотов кривошипа в минуту


Выберем масштабный коэффициент перемещения:

Положения |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
Схема, мм |
0 |
7.63 |
17.36 |
30.18 |
40.9 |
48.89 |
54.63 |
58.63 |
59.04 |
51.25 |
29.22 |
7.36 |
Перемещение, мм |
0 |
30.52 |
69.44 |
120.72 |
163.6 |
195.56 |
218.52 |
234.52 |
236.16 |
205 |
116.88 |
30.52 |
Путь, мм |
0 |
30.52 |
69.44 |
120.72 |
163.6 |
195.56 |
218.52 |
234.52 |
236.16 |
270 |
358.12 |
445.56 |
Построение планов скоростей механизма
Произведем подробный расчет скоростей
звеньев механизма в первом положении,
а значения скоростей в остальных
положениях сведем в таблицу. Скорость
точек
 равны нулю, т.к. они являются стойками,
направляющей. На чертеже выбираем полюс
плана скоростей р, с которым совпадают
точки
.
равны нулю, т.к. они являются стойками,
направляющей. На чертеже выбираем полюс
плана скоростей р, с которым совпадают
точки
.
Скорость
 находим
по формуле
находим
по формуле
 .
.
Скорость
 направлена
по касательной к окружности которую
описывает кривошип в сторону вращения.
направлена
по касательной к окружности которую
описывает кривошип в сторону вращения.
Выбираем масштабный коэффициент скорости, для этого отрезок pb принимаем равным 29 мм:

Откладываем от полюса отрезок pa перпендикулярно кривошипу в сторону его вращения.
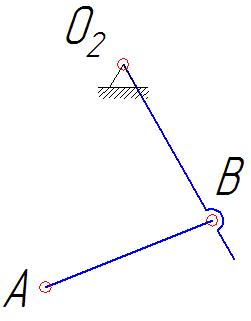
Составим векторное уравнение для
 рассматривая движение точки B
вокруг точек
рассматривая движение точки B
вокруг точек
 и
и
 :
:


 (стойка),
известно по величине и направлению,
(стойка),
известно по величине и направлению,
 перпендикулярен звену AB,
перпендикулярен звену AB,
 перпендикулярен звену
перпендикулярен звену
 .
Из конца вектора
откладываем линию перпендикулярно AB,
и из полюса проводим линию перпендикулярную
.
На пересечении этих линий ставим точку
и проводим векторы
и
.
Измеряя длинны этих векторов получаем:
.
Из конца вектора
откладываем линию перпендикулярно AB,
и из полюса проводим линию перпендикулярную
.
На пересечении этих линий ставим точку
и проводим векторы
и
.
Измеряя длинны этих векторов получаем:


Зная эти скорости можно рассчитать угловые скорости этих звеньев.


Скорость
 находим по формуле
находим по формуле
 ,
она направлена перпендикулярно к звену
в сторону вращения. Составим векторное
уравнение для
,
она направлена перпендикулярно к звену
в сторону вращения. Составим векторное
уравнение для
 ,
вокруг точки
и направляющей ХХ:
,
вокруг точки
и направляющей ХХ:


 (стойка),
известно по величине и направлению,
(стойка),
известно по величине и направлению, перпендикулярно звену 4,
перпендикулярно звену 4,
 равно нулю так как направляющая
неподвижна,
равно нулю так как направляющая
неподвижна,
 параллельна направляющей. Из конца
вектора
проводим линию перпендикулярную
звену 4, из полюса проводим линию
параллельную направляющей ХХ. На
пересечении линий ставим точку и получаем
векторы
параллельна направляющей. Из конца
вектора
проводим линию перпендикулярную
звену 4, из полюса проводим линию
параллельную направляющей ХХ. На
пересечении линий ставим точку и получаем
векторы
 и
.
Измеряя длины этих векторов получаем:
и
.
Измеряя длины этих векторов получаем:


Уравнения для расчета скоростей записаны, значения сведем в таблицу:
Наименование отрезков |
Длинны отрезков при положениях механизма, мм |
|||||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
(pa) |
29 |
29 |
29 |
29 |
29 |
29 |
29 |
29 |
29 |
29 |
29 |
29 |
(ba) |
20.58 |
17.69 |
17.75 |
19.96 |
22.68 |
26.04 |
29.67 |
34.31 |
41.25 |
48.07 |
41.84 |
28.43 |
(pb) |
33.42 |
29.03 |
25.47 |
22.15 |
19.27 |
17.59 |
17.92 |
21.46 |
30.35 |
43.93 |
47.47 |
39.92 |
(pc) |
41.77 |
36.28 |
31.83 |
27.69 |
24.08 |
21.98 |
22.4 |
26.82 |
37.93 |
54.91 |
59.33 |
49.9 |
(cd) |
41.77 |
30.9 |
16.01 |
2.49 |
6.9 |
12.87 |
18.12 |
25.75 |
37.42 |
37.14 |
7.25 |
39.81 |
(pd) |
0 |
22.75 |
30.56 |
28.1 |
21.73 |
15.76 |
11.11 |
6.12 |
5.05 |
35.1 |
60.4 |
35.59 |
Скорость точки |
Значения скоростей при положениях механизма, м/с |
|||||||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|||
|
9.63 |
|||||||||||||
|
0.915 |
0.915 |
0.915 |
0.915 |
0.915 |
0.915 |
0.915 |
0.915 |
0.915 |
0.915 |
0.915 |
0.915 |
||
|
0.648 |
0.557 |
0.559 |
0.629 |
0.714 |
0.82 |
0.935 |
1.081 |
1.29 |
1.51 |
1.31 |
0.89 |
||
|
1.05 |
0.91 |
0.8 |
0.69 |
0.6 |
0.554 |
0.564 |
0.676 |
0.956 |
1.38 |
1.49 |
1.25 |
||
|
6.078 |
5.082 |
5.084 |
6.059 |
7.049 |
8.060 |
9.080 |
11.036 |
13.064 |
15.089 |
13.083 |
9.041 |
||
|
11.00 |
9.059 |
8.042 |
7.033 |
6.037 |
5.079 |
5.089 |
7.011 |
10.00 |
14.054 |
15.070 |
13.022 |
||
|
1.31 |
1.14 |
1 |
0.872 |
0.759 |
0.692 |
0.706 |
0.845 |
1.19 |
1.73 |
1.86 |
1.57 |
||
|
1.31 |
0.973 |
0.504 |
0.078 |
0.217 |
0.405 |
0.571 |
0.811 |
1.179 |
1.17 |
0.228 |
1.25 |
||
|
0 |
0.71 |
0.96 |
0.88 |
0.684 |
0.496 |
0.35 |
0.193 |
0.159 |
1.106 |
1.9 |
1.12 |
||

