

1.3. Програма роботи
Вивчити роботу схеми мікропроцесорної системи частотного керування асинхронного двигуна з короткозамкненим ротором.
Визначити максимальний діапазон регулювання.
Зняти і побудувати механічну характеристику асинхронного двигуна при частоті струму живлення 20 та 40 Гц.
Визначити коефіцієнт підсилення та коефіцієнт корисної дії електромашинного підсилювача при частоті струму живлення асинхронного двигуна 20 та 40 Гц.
Дослідити роботу системи в автоматичному режимі.
При різних коефіцієнтах ПІД-регулятора зняти перехідні характеристики за швидкістю, визначити показники якості перехідного процесу.
Засобами MatLab змоделювати систему автоматичного регулювання, отримані результати порівняти із знятими перехідними характеристиками.
Знайти оптимальні коефіцієнти ПІД-регулятора.
1.4. Опис лабораторної установки
Принципова електрична схема лабораторної установки наведена на рис. 10.
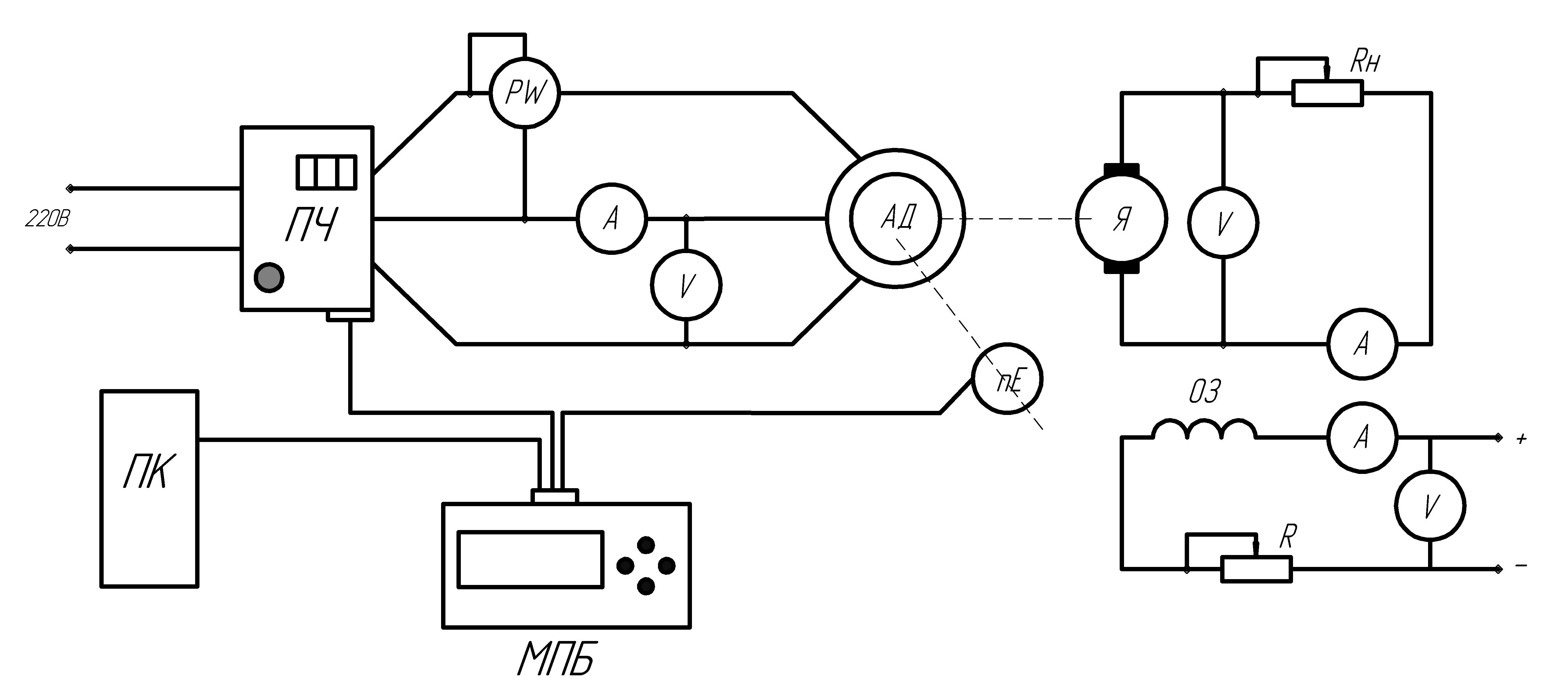
Рис. 10. Схема лабораторної установки.
Вона складається з електромашинного підсилювача, перетворювача частоти ПЧ, давача швидкості nE (давач Хола), персонального комп’ютера, мікропроцесорного блока МПБ, вимірювальних приладів та персонального комп’ютера (ПК).
Електромашинний підсилювач являє собою спеціально керовану машину постійного струму з великим коефіцієнтом підсилення потужності. Електромашинний підсилювач працює в режимі генератора і встановлюється на одному валу з приводом, як правило, асинхронний електродвигун АД.
1.5. Порядок виконання роботи.
Ознайомитися з розташуванням приладів та засобів комутації на лабораторному
стенді. Після ознайомлення зібрати схему згідно рис. 10.
Увага! Склавши схему необхідно запросити викладача для її перевірки.
Для визначення максимального діапазону регулювання перевести ПЧ в ручний режим і за допомогою потенціометра виставити мінімальне значення частоти. Дані записати у звіт.
Повторити дослід в автоматичному режимі задавши мінімальне значення швидкості на МПБ (мікропроцесорному блоці) при якому відбувається рівномірне обертання ротора двигуна.
Для побудови механічної характеристики виставити значення частоти f=20 Гц на ПЧ. Змінюючи величину опору RН записати покази приладів до таблиці. Опір рівномірно змінювати на всіх трьох реостатах. Дослід повторити при частоті f=40 Гц.
Табл.1
U |
|
I |
|
P |
|
Uоз |
|
Iоз |
|
Uя |
|
Iя |
|
cosφ |
|
n, об/хв |
|
ω, рад/с |
|
За даними таблиці визначити коефіцієнт підсилення і коефіцієнт корисної дії. За отриманими результатами зробити певні висновки.
Для дослідження роботи системи в автоматичному режимі необхідно на ПЧ задаючим потенціометром встановити частоту f=50 Гц, який буде блокувати верхнє значення частоти у разі некоректного задання швидкості, або у разі зникненні сигналу з давача Хола. За допомогою клавіш виставити певне завдання швидкості і спостерігати за роботою системи. Змінюючи навантаження в колі якоря ГПС спостерігати за роботою системи.
Для зняття перехідних характеристик системи необхідно за допомогою COM-порта під’єднати МПБ до персонального комп’ютера та завантажити програмне забезпечення. При різних настроюваннях ПІД-регулятора зняти декілька перехідних характеристик (в режимі холостого ходу та при навантаженні), вигляд перехідної характеристики та коефіцієнти регулятора занести до звіту.
Для знятих перехідних характеристик визначити прямі показники якості перехідного процесу. Зробити певні висновки.
Засобами MatLab змоделювати систему автоматичного регулювання з коефіцієнтами ПІД-регулятора, які були використані на лабораторній роботі. Для цього необхідно розрахувати відповідні коефіцієнти та скласти схему наведену на рис. 12 Отримані результати порівняти із знятими перехідними характеристиками.
Знайти оптимальні коефіцієнти ПІД-регулятора. Для цього необхідно використати блок NCD-outport. Структурна схема лінеаризованої системи ПЧ-АД має наступний вигляд.
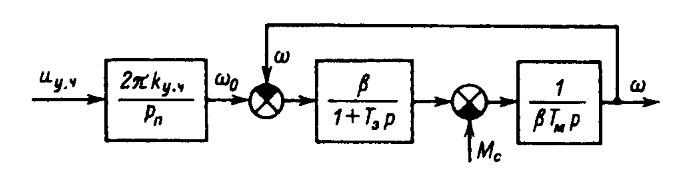
Рис. 11. Структурна схема лінеаризованої системи ПЧ-АД.
Для системи ПЧ-АД:
pп – кількість пар полюсів;
![]() – електромагнітна стала часу (
0,06...0,0006 с);
– електромагнітна стала часу (
0,06...0,0006 с);
![]() – модуль жорсткості лінеаризованої
механічної характеристики;
– модуль жорсткості лінеаризованої
механічної характеристики;
![]() – електромеханічна стала часу.
– електромеханічна стала часу.
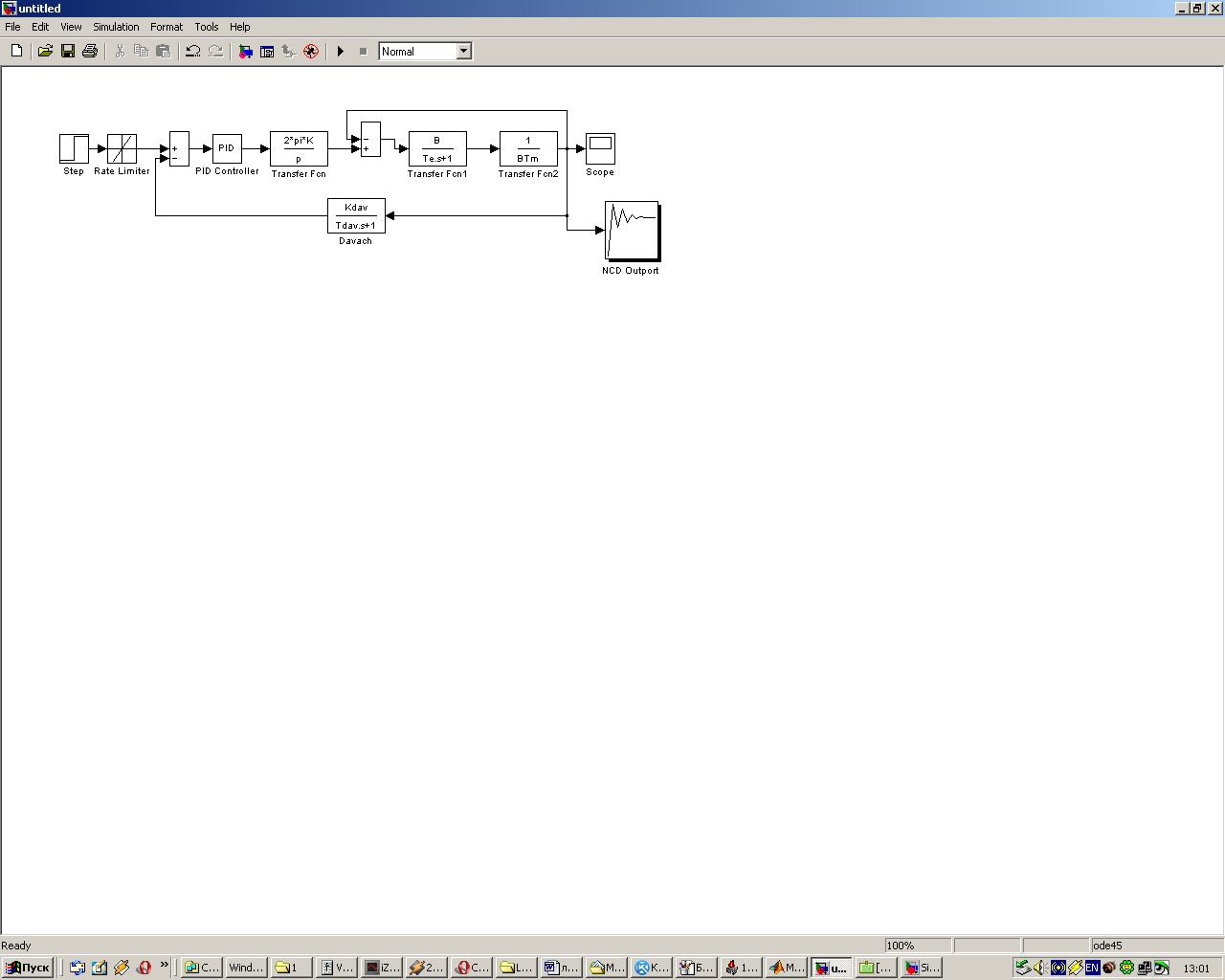
Рис. 12. Структурна схема системи частотного регулювання швидкості асинхронного двигуна з короткозамкненим ротором.