

Міністерство освіти і науки України
Національний університет водного господарства та природокористування
Факультет прикладної математики і комп’ютерно-інтеграваних систем
Кафедра електротехніки та автоматики
Методичні вказівки
до виконання лабораторної роботи
„Дослідження системи частотного регулювання швидкості асинхронного двигуна з короткозамкненим ротором”
з курсу „Автоматизований електропривод”
Рівне – 2009
Лабораторна робота №6 “ Дослідження системи частотного регулювання швидкості асинхронного двигуна з короткозамкненим ротором” з курсу „Автоматизований електропривод” для студентів, які навчаються за напрямом „Автоматизація та комп’ютерно-інтегровані технології” /Б.О. Баховець, Ю.С. Драчук. – Рівне, НУВГП, 2009, 12с.
Відповідальний за випуск – зав. кафедри електротехніки та автоматики, професор, академік УЕАН Б.О. Баховець.
Робота 6. Дослідження системи частотного регулювання швидкості асинхронного двигуна з короткозамкненим ротором
6.1. Мета роботи
Вивчити будову системи частотного керування асинхронним двигуном з короткозамкненим ротором, принципи роботи основних елементів, навчитися користуватися мікропроцесорним блоком для управління двигуном в автоматичному режимі.
6.2. Короткі теоретичні відомості
Способи регулювання кутової швидкості асинхронних двигунів випливають із виразу:
![]() (6.1)
(6.1)
|
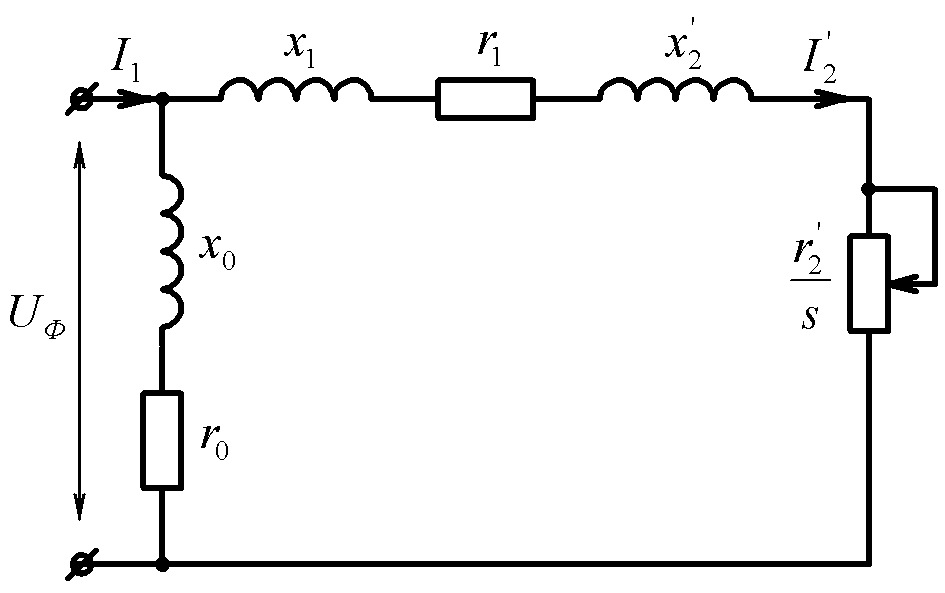
Рис. 1. Спрощена схема заміщення асинхронного двигуна. |
Момент асинхронного двигуна визначають
з виразу втрат потужності: втрати
електромагнітної потужності дорівнюють
електромагнітним втратам в колі ротора,
тобто
![]() .
Звідки
.
Звідки
![]() (6.2)
(6.2)
Приведений струм згідно схеми заміщення
 .
(6.3)
.
(6.3)
Підставивши значення у (6.2), одержимо
 .
(6.4)
.
(6.4)
Аналіз залежності (6.4) показує, що вона має два максимуми: один – в генераторному режимі, другий – в режимі двигуна.
Прирівнявши
![]() ,
визначають параметри максимумів, які
називають критичними: критичне ковзання
,
визначають параметри максимумів, які
називають критичними: критичне ковзання
![]() і критичні моменти
і критичні моменти
![]() і
і
![]() .
З врахуванням
і
.
З врахуванням
і
![]() рівняння (6.4) зводиться до такого виду:
рівняння (6.4) зводиться до такого виду:
 ,
(6.5)
,
(6.5)
де
![]() ,
,
 (6.6)
(6.6)
У цьому рівнянні знак „+” відноситься до рушійного режиму роботи двигуна, знак „-” – до генераторного режиму роботи паралельно з мережею, з якої він споживає струм, що створює основний магнітний потік.
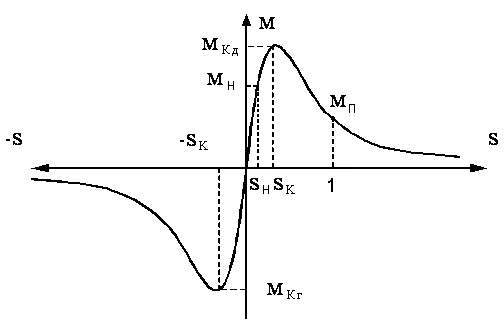
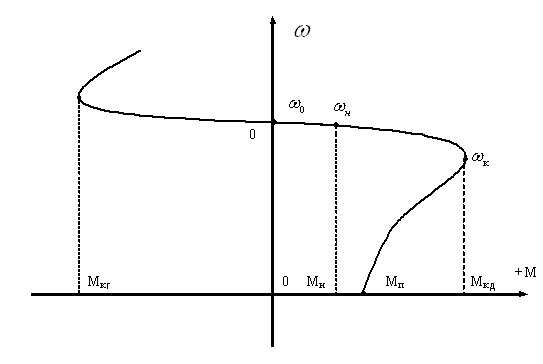
Залежність
![]() побудована за рівнянням (6.5), має два
максимуми (рис.2, а). Характеристика
побудована за рівнянням (6.5), має два
максимуми (рис.2, а). Характеристика
![]() (рис. 2, б) перерахована за характеристикою
(рис. 2, б) перерахована за характеристикою
![]() з врахуванням, що
з врахуванням, що
![]() .
.
а) |
б) |
Рис. 2. Механічні характеристики асинхронного двигуна. |
|
При регулюванні частоти виникає необхідність регулювання напруги живлення, бо ЕРС, яка індукується в обмотці статора пропорційна частоті і магнітному потоку
![]() (6.7)
(6.7)
Нехтуючи у першому наближенні спадом напруги на опорах обмотки статора можна, записати що
![]() (6.8)
(6.8)
З (6.8) слідує, що при напрузі джерела
живлення
![]() зміна частоти приводить зміни
магнітного потоку. Зокрема, зменшення
частоти f призводить до збільшення
потоку і, як наслідок, відбувається
насичення магнітної системи двигуна і
збільшення струму намагнічування, що
пов’язане з його недопустимим нагрівом.
Збільшення частоти f призводить до
зменшення магнітного потоку, що при
постійному моменті навантаження
призводить до збільшення струму статора
і збільшення нагрівання. При цьому
знижується максимальний момент і
перевантажувальна здатність двигуна.
зміна частоти приводить зміни
магнітного потоку. Зокрема, зменшення
частоти f призводить до збільшення
потоку і, як наслідок, відбувається
насичення магнітної системи двигуна і
збільшення струму намагнічування, що
пов’язане з його недопустимим нагрівом.
Збільшення частоти f призводить до
зменшення магнітного потоку, що при
постійному моменті навантаження
призводить до збільшення струму статора
і збільшення нагрівання. При цьому
знижується максимальний момент і
перевантажувальна здатність двигуна.
Тому з метою повного використання асинхронного двигуна необхідно підтримувати певне співвідношення між частотою і напругою з врахуванням залежності моменту опору виробничого механізму від швидкості.
Наближено це співвідношення знаходять,
знехтувавши активним опором обмотки
статора (![]() ).
Тоді критичний момент згідно (6.6)
).
Тоді критичний момент згідно (6.6)
![]() (6.9)
(6.9)
де
![]() – індуктивний опір короткого замикання,
– індуктивний опір короткого замикання,
![]() –
стала величина.
–
стала величина.
Двигун за моментом буде використано повністю, якщо для будь-якої частоти
 (6.10)
(6.10)
де
![]() – механічна характеристика виробничого
механізму,
– механічна характеристика виробничого
механізму,
![]() – фазна напруга, яка відповідає частоті
– фазна напруга, яка відповідає частоті
![]() .
.
З (6.10) слідує, що для будь-яких двох значень частоти за частотного регулювання повинно зберігатися співвідношення:
 (6.11)
(6.11)
прийнявши один з режимів за номінальний
(![]() ),
тоді
),
тоді
 .
(6.12)
.
(6.12)
Рівняння (6.12) встановлює співвідношення між частотою, напругою живлення і характером навантаження. Для основних видів навантаження залежність (6.12) матиме такий вигляд:
для
 .
Підставивши в (6.12)
.
Підставивши в (6.12)
 ,
одержимо:
,
одержимо:
![]() (6.13)
(6.13)
для
 маємо
маємо

Звідки
![]() (6.14)
(6.14)
для вентиляторної характеристики за умови
 матимемо
матимемо

Звідки закон регулювання
![]() (6.15)
(6.15)
Згідно до законів регулювання (6.13-6.15) на рис.3 наведені механічні характеристики для частот більших і менших від номінальної.
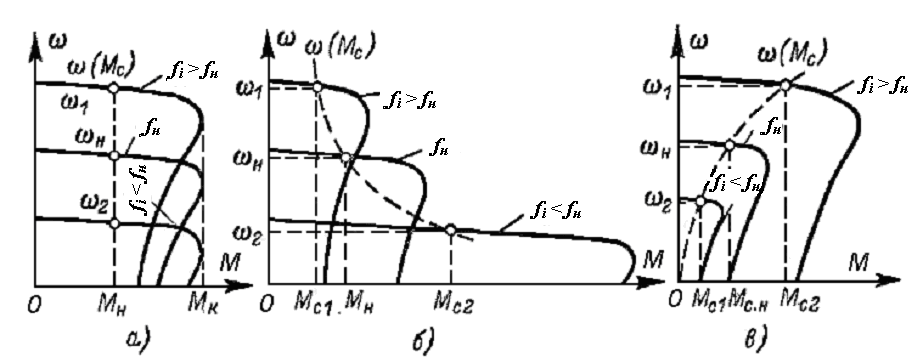
Рис. 3. Механічні характеристики асинхронного двигуна при частотному регулюванні швидкості для випадку при МС=const (а), PC=const (б) і вентиляторного навантаження (в).
В сучасних електроприводах з частотним регулюванням швидкості використовують різноманітні перетворювачі частоти (ПЧ). За принципом дії і будовою силові частини ПЧ поділяють на дві групи: з безпосереднім зв’язком навантаження з мережею живлення та ПЧ з проміжною ланкою постійного струму.
Перетворювач з безпосереднім зв’язком
перетворює напругу частотою
![]() у напругу частотою
у напругу частотою
![]() ,
при цьому
,
при цьому
![]() .
Перевагами даного перетворювача є
одноразове перетворення електричної
енергії і як наслідок – високий ККД
(0,97...0,98), можливість регулювати вихідну
напругу і рекуперативний режим роботи.
Недоліки: регулювання частоти вниз від
частоти мережі, велике число тиристорів
(по шість на кожну фазу) і низький
коефіцієнт потужності (менше 0,8).
.
Перевагами даного перетворювача є
одноразове перетворення електричної
енергії і як наслідок – високий ККД
(0,97...0,98), можливість регулювати вихідну
напругу і рекуперативний режим роботи.
Недоліки: регулювання частоти вниз від
частоти мережі, велике число тиристорів
(по шість на кожну фазу) і низький
коефіцієнт потужності (менше 0,8).
Перевагою перетворювачів частоти з ланкою постійного струму є регулювання частоти як вверх, так і вниз від частоти мережі та регулювання напруги з врахуванням характеру навантаження. Недолік – подвійне перетворення електричної енергії, що знижує ККД.
В перетворювачах частоти для живлення двигунів змінного струму можуть використовуватися як автономні інвертори напруги (АІН), так і автономні інвертори струму (АІС). В АІН система регулювання забезпечує в результаті широтно-імпульсної модуляції на виході інвертора фазні напруги, близькі до синусоїдних, а в АІС – фазні струми в обмотках двигуна, близькі до синусоїдних.
![]()